






canopen的由来
CAN(Controller Area Network)现场总线仅仅 定义了第 1 层(物理层,见 ISO11898-2 标准)、第 2 层(数据链路层,见 ISO11898-1 标准); 而在实际设计中,这两层完全由硬件实现,设计人员无需再为此开发相关软件(Software) 或固件(Firmware),只要了解如何调用相关的接口和寄存器,即可完成对 CAN 的控制。但 CAN 没有规定应用层。也就是没有规定与实际应用相关的逻辑,比如开关量输入输 出,模拟量输入输出,canopen协议层因此出现。
CANopen 协议是在 20 世纪 90 年代末,由总部位于德国纽伦堡的 CiA 组织—— CAN-in-Automation,在 CAL(CAN Application Layer)的基础上发展而来。
CANopen 协议通常分为用户应用层、对象字典以及 通信三个部分。
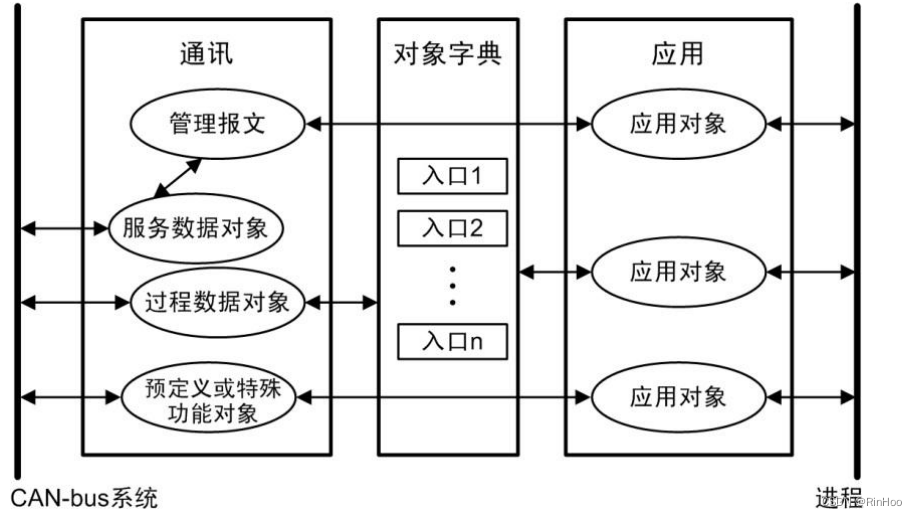
其中最为核心的是对象字典,描述了应用对象和 CANopen 报文之间的关系。
canopen cia402 ds402关系
- CANopen是通用的工业领域通信协议。
- CIA402是CANopen的一个应用领域协议,用于运动控制和驱动装置。
- DS402是CIA402协议的一部分,用于伺服驱动器的特定通信规范。















 2428
2428











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









