







目录
一、创建vivado硬件平台
这里使用为领航者定制开发板配置的vivado工程。
将工程目录下的的sdk文件,比如:Navigator_7020.sdk,拷贝在Ubuntu系统下,可以使用FTP传输或者共享目录。
二、设置Petalinux的环境变量
在 Ubuntu 系统中需要先设置 petalinux 工作环境,也就是对 petalinux 工作环境进行初 始化,在终端输入如下命令即可:
source /opt/pkg/petalinux/2018.3/settings.sh就是通过souce来运行Petalinux安装目录下的setting.sh脚本文件,这个安装目录根据实际情况修改。
二、创建Petalinux工程
为了方便工程的管理,我们在用户家目录下的 petalinux 目录中创建 petalinux 工程, 进入到用户家目录下的 petalinux/目录中,现在我们创建一个名为“ALIENTEK-ZYNQ”的 Petalinux 工程,在终端中输入如下命令:
petalinux-create -t project --template zynq -n ALIENTEK-ZYNQcd ALIENTEK-ZYNQ //进入到 petalinux 工程目录下
petalinux-config --get-hw-description ../hdf/Navigator_7020.sdk/ //导入 hdf 文件Hdf 文件导入成功之后会自动弹出 petalinux 工程配置窗口:

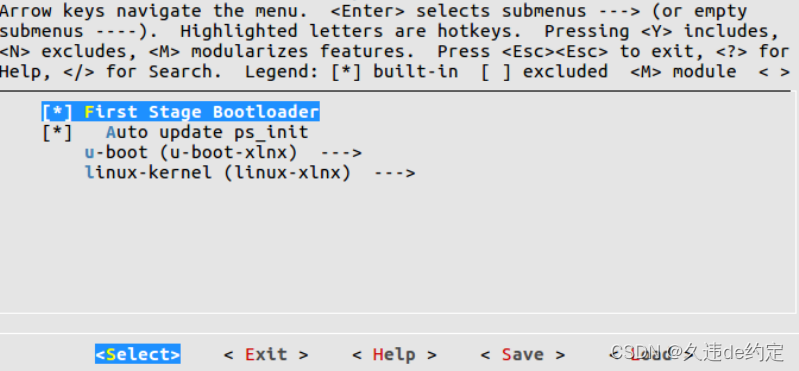
括号里的“*”表示为已使能配置。前两个选项表示会自动生成程序固化实验中的 fsbl.elf 文件和自动更新 ps_init。下面两个选项用 来配置 u-boot 和 linux-kernel 的来源,本实验保持默认来源配置。
“Auto Config Settings”菜单主要就是选择是否使能 fsbl、Device tree、Kernel 和 u-boot 的自动配置,默认为自动配置,无需更改,就不看了。
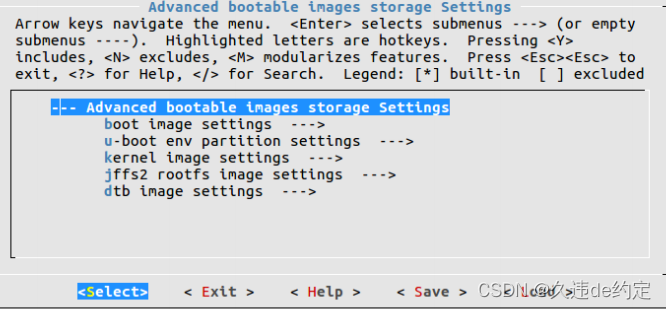
“Subsystem AUTO Hardware Settings”子菜单的内容如下图所示:

进入到该界面的各个外设子菜单中,可以发现都已经有了默认配置,这些默认配置是根据 hdf 文件的信息自动配置的,基本上无需我们手动修改;“Serial Settings”配置项用于 配置开发板的调试串口和串口波特率等参数,对于本次实验,这里需要修改一下,首先光标移动到该配置项按回车进入

因为领航者开发板有两个串口外设,USB 串口和 RS232、RS485(RS232 和 485 共用),而 板子的调试串口是 USB 串口,所以在“Primary stdin/stdout”配置项中需要将其修改为 ps7_uart_0,ps7_uart_0 对应的就是 USB 串口。修改完成之后连按两次 ESC 键回到上一级菜 单。

回到主界面,“Firmware Version Configuration”可以用来修改定制的 linux 系统的 主机名和产品名,默认与该 Petalinux 工程同名,如果需要可修改。移动到底部的“Save”,,按键盘上的“Enter”键,会进入

按键盘上的“Enter”键确认:
 再次按键盘上的“Enter”键确认,返会到原界面,接着按两次键盘上的“Esc”退出配置窗口。
再次按键盘上的“Enter”键确认,返会到原界面,接着按两次键盘上的“Esc”退出配置窗口。
如果后面想重新配置,只需输入“petalinux-config”命令即可重新配置。
三、配置Linux内核
现在我们开始定制 Linux 内核,在终端输入如下命令:
petalinux-config -c kernel等一段时间后会弹出 Linux 内核的配置界面,如下图所示:

可以看到 Petalinux 默认使用的内核版本为 4.14.0,当然也可以换成其它版本的内核。 这里使用的内核 Xilinx 官方已经做好了基础配置,如无特定需求,无需更改。
四、设置根文件系统
在终端输入下面的命令可配置根文件系统,如果不需要配置可不执行该命令。
petalinux-config -c rootfs
默认配置可满足一般使用,也可以根据需求来定制根文件系统,本实验保持默认配置。 需要说明的是“PetaLinux RootFS Settings”可以用来设置 root 用户的密码,默认为 “root”。后面登录的时候会用到。 保存配置并退出。
五、配置设备树文件
vi project-spec/meta-user/recipes-bsp/device-tree/files/system-user.dtsi 
我们把按键、led、蜂鸣器、USB 和 IIC 设备的 EEPROM 和 RTC 添加到 system-user.dtsi 设备树当中,system-user.dtsi 文件内容如下:
/include/ "system-conf.dtsi"
#include <dt-bindings/gpio/gpio.h>
/ {
model = "Navigator Development Board";
compatible = "alientek,zynq-7020","xlnx,zynq-7000";
leds {
compatible = "gpio-leds";
gpio-led1 {
label = "led1";
gpios = <&gpio0 54 GPIO_ACTIVE_HIGH>;
linux,default-trigger = "heartbeat";
};
gpio-led2 {
label = "pl_led0";
gpios = <&gpio0 55 GPIO_ACTIVE_HIGH>;
default-state = "on";
};
gpio-led3 {
label = "pl_led1";
gpios = <&gpio0 56 GPIO_ACTIVE_HIGH>;
default-state = "on";
};
gpio-led4 {
label = "ps_led0";
gpios = <&gpio0 7 GPIO_ACTIVE_HIGH>;
default-state = "on";
};
gpio-led5 {
label = "ps_led1";
gpios = <&gpio0 8 GPIO_ACTIVE_HIGH>;
default-state = "on";
};
gpio-led6 {
label = "led2";
gpios = <&gpio0 0 GPIO_ACTIVE_HIGH>;
default-state = "on";
};
};
keys {
compatible = "gpio-keys";
autorepeat;
gpio-key1 {
label = "pl_key1";
gpios = <&gpio0 57 GPIO_ACTIVE_LOW>;
linux,code = <105>; // Right
debounce-interval = <20>; // 20ms
};
gpio-key2 {
label = "pl_key2";
gpios = <&gpio0 58 GPIO_ACTIVE_LOW>;
linux,code = <106>; // Left
debounce-interval = <20>;
};
gpio-key3 {
label = "ps_key1";
gpios = <&gpio0 12 GPIO_ACTIVE_LOW>;
linux,code = <103>; // Up
debounce-interval = <20>;
};
gpio-key4 {
label = "ps_key2";
gpios = <&gpio0 11 GPIO_ACTIVE_LOW>;
linux,code = <108>; // Down
debounce-interval = <20>;
};
touch-key {
label = "touch_key";
gpios = <&gpio0 59 GPIO_ACTIVE_HIGH>;
linux,code = <28>; // ENTER
gpio-key,wakeup;
debounce-interval = <20>;
};
};
beeper {
compatible = "gpio-beeper";
gpios = <&gpio0 60 GPIO_ACTIVE_HIGH>;
};
usb_phy0: phy0@e0002000 {
compatible = "ulpi-phy";
#phy-cells = <0>;
reg = <0xe0002000 0x1000>;
view-port = <0x0170>;
drv-vbus;
};
};
&i2c0 {
clock-frequency = <100000>;
eeprom@50 {
compatible = "24c64";
reg = <0x50>;
pagesize = <32>;
};
rtc@51 {
compatible = "nxp,pcf8563";
reg = <0x51>;
};
};
&usb0 {
dr_mode = "otg";
usb-phy = <&usb_phy0>;
};设备树文件当中配置了 6 个 gpio led 灯,5 个按键、一个蜂鸣器、eeprom、RTC 以及 USB0 接口,下面简单的讲解下 gpio led 的配置。 6 个 gpio led 灯分别对应开发板的 6 个 led 灯,配置信息主要包括 compatible(用于与 内核驱动匹配的名字)、label(名字)、gpios(对应的 GPIO 管脚)、默认状态以及触发状 态,内容编辑完成之后保存退出即可。
六、编译petalinux工程
现在我们就可以编译整个 Petalinux 工程了,在终端输入如下命令:‘
petalinux-build该命令将生成设备树 DTB 文件、fsbl 文件、U-Boot 文件,Linux 内核和根文件系统映 像。编译完成后,生成的映像将位于工程的 images 目录下。需要说明的是 fsbl、U-Boot 这 两个我们在工程中并没有配置,这是因为 Petalinux 会根据 hdf 文件和配置 petalinux 工程自动配置 fsbl 和 uboot,如无特需要求,不需要再手动配置。
七、制作BOOT.BIN启动文件
Petalinux 提供了 petalinux-package 命令将 PetaLinux 项目打包为适合部署的格式,其 中“petalinux-package --boot”命令生成可引导映像,该映像可直接与 Zynq 系列设备(包 括 Zynq-7000 和 Zynq UltraScale + MPSoC)或基于 MicroBlaze 的 FPGA 设计一起使用。对 于 Zynq 系列设备,可引导格式为 BOOT.BIN,可以从 SD 卡引导。对于基于 MicroBlaze 的设 计,默认格式为 MCS PROM 文件,适用于通过 Vivado 或其他 PROM 编程器进行编程。
ZYNQ 的启动文件 BOOT.BIN 一般包含 fsbl 文件、bitstream 文件和 uboot 文件。使用下 面命令可生成 BOOT.BIN 文件:
petalinux-package --boot --fsbl --fpga --u-boot --force选项“--fsbl”用于指定 fsbl 镜像文件所在位置,后面接文件对应的路径信息,如果不 指定文件位置,默认对应的是 images/linux/zynq_fsbl.elf;选项“--fpga”用于指定 bitstream 文件所在位置,后面接该文件对应的路径信息,默认对应的是 images/linux/system.bit;选项“--u-boot”用于指定 U-Boot 镜像所在位置,后面接该文 件所在路径信息,默认为 images/linux/u-boot.elf。这里笔者均没有指定对应的文件的路 径信息,那么 Petalinux 会自动使用默认文件。
七、制作SD卡启动文件
如果使用 SD 卡引导 linux 系统启动,一般需要在 SD 卡上有 2 个分区。一个分区使用 FAT32 文件系统,用于放置启动镜像文件(如 BOOT.BIN,linux 镜像等),另一分区使用 EXT4 文件系统,用于存放根文件系统。
这里就不介绍在Ubuntu下SD开的分区与格式化了。

将 petalinux 工程目录 image/linux 目录下的 BOOT.BIN 和 image.ub 文件拷 贝到名为 boot 的分区也即/dev/sdb1 分区中。 本实验只需要这两个文件即可,拷贝完成之后就可以卸载 SD 卡了。
八、开发板启动设置
开发板需要设置为SD启动,查看对应的手册就行。开发板连接电脑。
九、打开串口上位机,进入 Linux 系统
打开 MobaXterm 串口终端上位机软件或其它串口上位机、并连接开发板 USB 串口。串口 终端软件会打印出 Linux 启动信息,之后输入对应的密码就可以了。















 1938
1938











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









