







前言
控制系统的原理就是通过测量、比较和执行实现。测量的关键是被控变量的实际值与期望值相比较而得到的偏差,用这个偏差来纠正系统的响应,执行调节控制。PID控制作为最早实用化的的控制器已经有很长时间的历史。 由于PID控制简单易懂,使用中不需要精确的数学模型等先决条件,因而成为应用最为广泛的控制器。本文从一个控制示例出发,由浅入深分析PID各个环节的作用。
一、什么是PID控制
PID控制就是对偏差信号e(t)进行比例、积分和微分运算变换后得到的一种控制规律。
一般形式为:
也可写成:
r(t)为控制期望,为系统输出
控制器设计的核心思想就是通过输出来控制输入,使得系统的输出与我们的期望相等。
将式(1-1)进行拉式变换得到控制器的传递函数为:
二、实例分析
例:往一圆柱形水桶中加水,目标让水桶水位上升到期望高度,水桶自带漏水特性:水桶漏水流量与水位高度成正比(假设比例系数为K)。(水位高度可以观测)
假设水位上升速度为v,加水流量为u,桶底面积为M,漏水流量为x,水位高度为h。
整理上述两式得到系统的微分方程为:
进行拉式变换得:
变换得到系统的传递函数:
具体的控制系统框图为:
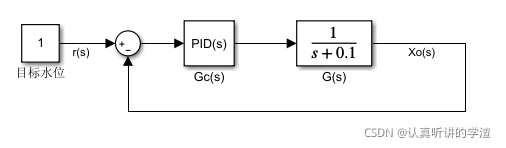
相应的,
系统的闭环传递函数为:
为了方便讨论,
目标水位(期望)r(t)=1,r(s)=1/s,
漏水系数K=0.1,桶底面积M=1
1.比例控制
使用比例控制,控制器的传递函数为:
相应的闭环传递函数为,
观察闭环传递函数的形式我们可以看出,使用比例控制其实改变了原系统传递函数的极点,极点由-k变为-(K+Kp),极点向左移动
系统输出
部分分式展开得,
拉氏反变换得,
在Simulink中仿真,Kp=1
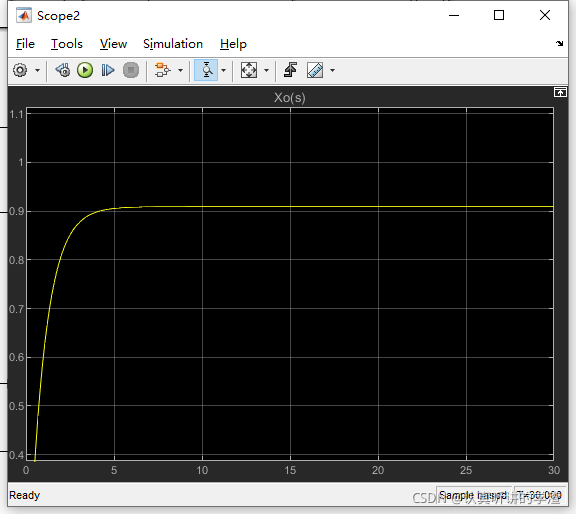
由曲线得出,稳定值为0.91与理论值相同
理论值:
由可知,
- 为了系统稳定,必须有K+Kp>0,且Kp越大,响应速度越快
- 使用比例控制无法消除稳态误差,
,Kp越大,稳态误差越小
- 可知稳态误差出现的原因是有漏水K,当K=0,系统无稳态误差。
2.积分控制
使用积分控制,控制器的传递函数为:
闭环传递函数:
对比与
可以发现,加入积分控制实际上提高了控制系统的阶次,将原来的一阶系统变为二阶,相应的就拥有了二阶系统的一些特点。
系统输出,
至此,针对该实例,使用积分控制的分析其实就是分析二阶系统的各种特性。
为了系统稳定,我们要保证闭环传递函数的极点在虚轴左侧(即极点的实部为负)
利用求根公式求极点:
下面分情况讨论Ki的取值范围:
,可得
,可得,
3.积分控制的由来
由比例控制得出:针对一阶系统的阶跃响应,使用比例控制会有稳态误差
下面讨论依然以一阶系统的阶跃响应为对象,对应的闭环传递函数为:
由终值定理可知,(使用前提,设计的Gc(s)使系统稳定)
整理得,
所以想要消除稳态误差,只需要满足:
即,
易得,
有时间再补。。。

















 9万+
9万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









