






基本思想:通过离散的数学模型来对系统未来时刻的输出进行预测。降低了模型的精度要求与控制参数的设计难度,针对非线性问题具有良好表现。
模型预测控制分类:连续状态的 MPC 和离散状态的 FCS-MPC。
FCS-MPC具有快速动态响应、无需调制单元、无需考虑控制时域与预测时域、易于添加约束项、能够实现多目标优化等优势。因此,选用FCS-MPC对电流内环控制器进行设计。
1.1有限集模型预测控制的基本原理
FCS-MPC包含预测模型、价值函数、滚动优化这三个基本要素。
预测模型:将系统进行离散化得到。根据上一时刻系统状态预测未来时刻的输出;
价值函数:将离散预测模型的预测值与系统的给定值相减可以得到;
滚动优化(核心要素):对系统中有限个数的开关状态进行反复在线遍历寻优,选择最合适的开关状态并输出,实现控制目标,也被称为最小化价值函数。所谓的优化不是针对系统全局指标,而是针对系统内任意采样时刻都存在与之对应的最优解。换言之,FCS-MPC虽然不能直接得到适用于系统任意时刻的最优解,但其滚动优化过程周而复始,可对系统的每个采样时刻进行反复不断地在线寻优,故而能够有效规避系统中出现的各种复杂问题。
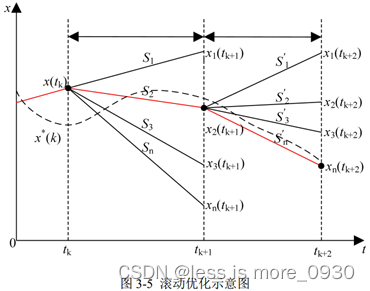
在上图中
、
、
:分别表示
时刻、
时刻和
时刻系统的输出值;
、
、
:分别表示
时刻对应开关状态下系统的输出;
、
、
:分别表示
时刻对应开关状态下系统的输出;
,
,...,
和
,
,...,
:分别表示系统的开关状态;
根据FCS-MPC的控制原理并结合上图,可以看出为
时刻的最优开关状态,
为
时刻的最优开关状态。
综上,采用FCS-MPC对Vienna整流器电流内环控制器进行设计的步骤如下:
(1)确定系统的控制目标与开关状态
的关系,并根据系统的控制要求构建预测模型表达式;
(2)对当前时刻的系统状态信息进行采样,并根据预测模型对下一时刻的状态信息进行预测输出;
(3)根据系统的控制目标确定价值函数,并添加其他有关约束项;
(4)对系统进行滚动优化寻优,将输出作为最优开关状态应用于Vienna整流器。
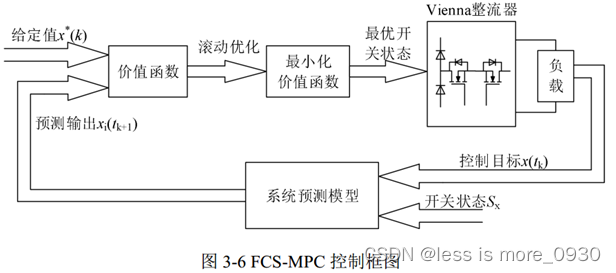
FCS-MPC 的控制原理框图如下图所示。
1.2电流内环有限集模型预测控制器设计
有限集模型预测控制器的设计内容主要包括构建预测模型、确定价值函数与进行滚动优化三个步骤。
(1)预测模型
Vienna 整流器在两相静止坐标系下的数学模型为:

式中:
![]()
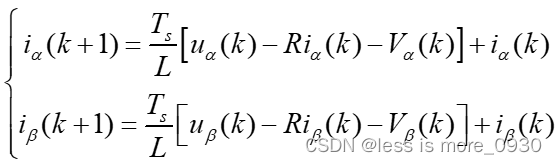
为建立系统的预测模型,需要对控制系统离散化处理。假设控制周期为 ,根据欧拉法可得控制系统的离散公式如下:

因此通过对 Vienna 整流器两相静止坐标系下的数学模型进行离散化处理,得到如下公式:

对上式进行变换可得:
由上式可得电流内环的预测模型表达式。由于设计的双闭环控制器将电压外环的输出作为电流内环的给定值,故在得到k+1时刻的电流预测值后,还需对 k+1 时刻的电流给定值进行预测。利用拉格朗日差值定理得到k+1时刻给定电流的预测值:

对上式进行park 逆变换,得到αβ坐标系下k+1时刻给定电流的预测值:

(2)价值函数
得到k+1时刻给定信号的预测值和电流的预测值后,两者之差即为价值函数:

电流预测模型的价值函数为绝对值价值函数,主要包括两部分,分别为α轴分量与β轴分量的给定电流预测值与实际电流预测值差值的绝对值,不仅适用于开关频率较高的场合,还能够减小计算量,从而简化设计。
以上控制策略中不含中点电位平衡项,倘若不对中点电位进行控制,会造成中点电位的不平衡,从而对直流输出侧的上、下电容造成损害,严重时会导致直流输出电压波形畸变,甚至影响系统整体性能。因此,在Vienna整流器中实现中点电位平衡非常具有必要性。
直流输出上、下电容的充电与放电情况不一致是造成中点电位不平衡的主要原因,而这一现象是由电压空间矢量中的中、小矢量造成的。考虑到FCS-MPC在实际应用中具有实现多约束控制的优势,故可利用这一特点来实现系统的中点电位平衡控制。

由上图可知,负载电流为:

由电容与电流的关系可得:

由于控制目标为中点电位,即直流输出侧上、下电容的电压差,即:

为使Vienna整流器中点电位平衡,令 ,联立上式得:

对上式离散化处理,得:

由基尔霍夫电流定律可得p点、n点和直流输出侧中点o的电流表达式为:
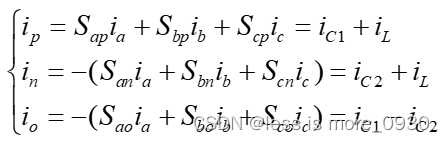
联立、
、
和
,得到中点电位预测模型为:

综上,最终可以得到预测电流的价值函数为:
其中,λ为中点电位平衡约束的权重系数。
由上式可以看出,电流内环有限集模型预测控制器的表达式中既包含预测电流的价值函数,又包括中点电位平衡项。因此,这种控制策略可以在保证预测电流能够完美跟踪给定信号的同时,实现中点电位平衡控制。
(3)滚动优化
由Vienna整流器工作原理可知,Vienna整流器的输出特性由输入电流正、负极性与开关状态共同决定。当输入电流极性不同时,即使开关组合不变,所对应的电压空间矢量也不相同,从而造成系统的输出特性也不一样。因此,滚动优化过程是在某一确定的电流极性下进行的。
在任意一个电流区域内,都具有8种不同的开关组合,每一组都分别对应一组基础矢量。将这8种开关组合所对应的
代入αβ坐标系下的离散化的数学模型进行计算,就可以得到k+1时刻不同开关组合所对应的电流预测值,而给定电流的预测值由电压外环滑模控制器的输出决定。结合以上条件就可以得知,最终得到的预测电流的价值函数g中的待求量为开关状态。因此,将上述已知条件代入g中,就可得到8组开关组合,通过遍历寻优,遍历出绝对值函数最小的一组开关组合,即最小化价值函数,所得即为此刻的最优开关组合,进而将其作用于Vienna整流器以实现系统的优化控制。
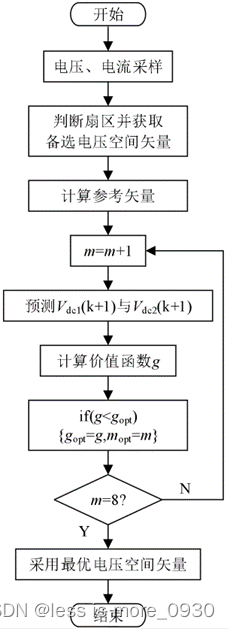
综上,将FCS-MPC应用于电流内环不仅提高了控制精度,同时实现了中点电位平衡控制。每个电流区域内仅有8个电压空间矢量参与遍历寻优,一定程度上减小了计算量。算法流程图如下,其中m为开关状态序号,为最优价值函数:
根据对Vienna整流器电压外环变指数趋近律滑模变结构控制器以及对电流内环有限集模型预测控制器的设计,可以得到系统的整体控制框图如下所示:


















 587
587











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











