







在使用蜂鸣器之前,我们首先要了解蜂鸣器。蜂鸣器分 有源蜂鸣器和无源蜂鸣器,两者表面长相相同。
有源蜂鸣器:内部自带振荡源,将正负极接上直流电压即可持续发声,频率固定
无源蜂鸣器:内部不带振荡源,需要控制器提供振荡脉冲才可发声,调整提供振荡脉冲的频率,可发出不同频率的声音
蜂鸣器有正负极,顶部印有+号的为正极,若蜂鸣器引脚没剪,则长的为正极。
有源蜂鸣器:
一种带有内置驱动电路的蜂鸣器。它只需要输入一个交替电压信号,就可以发出一定频率的声音。源蜂鸣器通常带有两个引脚,一个用于连接电源,另一个用于连接控制信号。当控制信号为高电平时,蜂鸣器发出声音;当控制信号为低电平时,蜂鸣器停止发声。源蜂鸣器具有驱动电路,因此其工作电压范围比无源蜂鸣器宽,可以直接连接到数字电路或微控制器的IO口上使用。
其单片机IO端口简单接法如下:

R1起到限流保护作用,单片机IO端口输出低电平时有源蜂鸣器就响,反之不响。如果用三极管控制驱动有源蜂鸣器,常见接法如下,单片机IO端口输出低电平就响

无源蜂鸣器:
一种不带有内置驱动电路的蜂鸣器。它只是一个振动的电磁铁,需要外部驱动电路才能工作。无源蜂鸣器通常只有两个引脚,一个用于连接正极,另一个用于连接负极。在使用无源蜂鸣器时,需要外部电路提供一定频率的交替电压信号来驱动蜂鸣器发声。因此,无源蜂鸣器的驱动方式相对较为复杂,需要通过外部电路来实现。
总的来说,源蜂鸣器比无源蜂鸣器更容易使用,只需要提供简单的控制信号即可发出声音。而无源蜂鸣器需要外部电路的支持才能工作,使用起来相对较为复杂,但是其工作稳定性较高,可靠性也较强。
下面使用STM32L431开发板来对蜂鸣器进行开发。该开板上集成的是无源蜂鸣器,需要我们提供2KHz~5KHz的方波去驱动它。
首先根据蜂鸣器的电路图,可知蜂鸣器的管脚为PA11,可作为TIM1_CH4使用,因此使能定时器TIM1的CH4t通道,并使其输出PWM即可,对相应管脚进行设置,如下图所示:
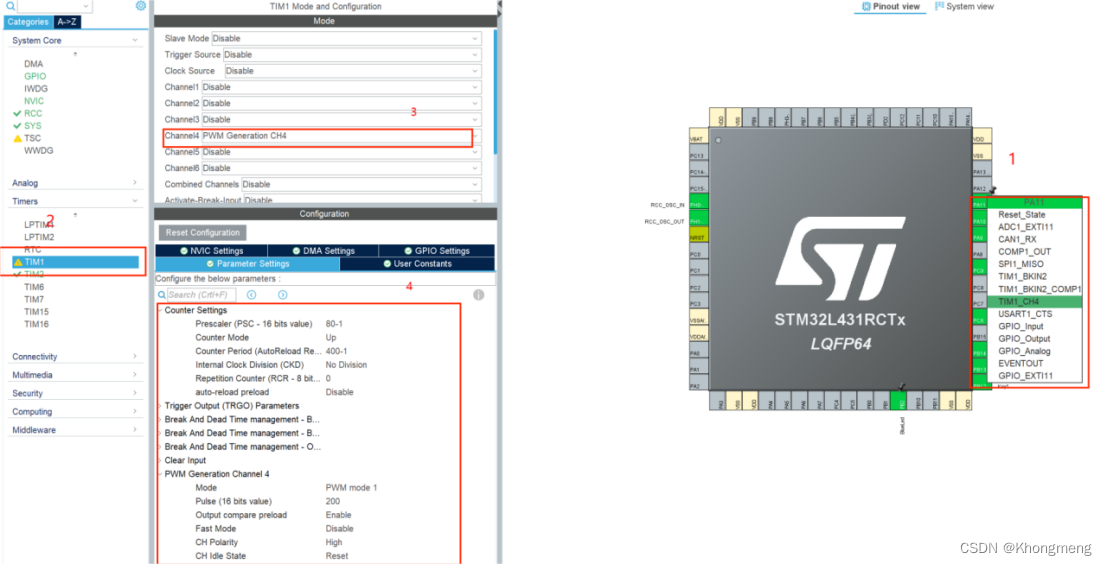
蜂鸣器工作的频率在2KHz~5KHz,在这个频率范围内,频率越高,声音音色越清亮。因此需要设置其频率和占空比:(设定蜂鸣器的输出频率为2.5Khz,占空比为50%)
根据芯片的数据手册以及设置的时钟树可知,TIM2内部时钟来源是ABP2= 80Mhz ,对其进行与预分频处理:
计算器的时钟频率CK_CNT=fck_psc/(PSC+1)=80Mhz/(80-1+1)=1Mhz。因此所以预分频系数设置为80-1。
蜂鸣器想要工作在2.5Khz,则自动重装载值(Counter Period (AutoReload Register - 16 bits value ))ARR=1Mhz/2.5Khz=400.
占空比为50%,则Pulse=400/2=200。
为了防止蜂鸣器误发声音还需将GPIO设置为内部下拉,同时对管脚进行命名:

最后生成代码。
在tim.c相应位置添加如下代码:
/*Ring_Times为蜂鸣器响几次,Interval_time为蜂鸣器响的间隔时间*/
void Beep_Start(uint8_t Ring_Times,uint16_t Interval_time)
{
while(Ring_Times--)
{
if(HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
HAL_Delay(Interval_time);
if(HAL_TIM_PWM_Stop(&htim1, TIM_CHANNEL_4) != HAL_OK)
{
Error_Handler();
}
HAL_Delay(Interval_time);
}
}补充说明:
HAL_TIM_PWM_Start() 函数
该函数的作用是启动PWM信号。
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel)
函数参数:htim 是需要启动的PWM信号的时钟
函数参数:Channel 是通道TIMx要启用的通道
此参数可以是以下值之一:
TIM_CHANNEL_1:选择TIMx通道2
TIM_CHANNEL_2:选择TIMx通道2
TIM_CHANNEL_3:选择TIMx通道2
TIM_CHANNEL_4:选择TIMx通道4
TIM_CHANNEL_5:选择TIMx通道5
TIM_CHANNEL_6:选择TIMx通道6
返回值:HAL状态
HAL_TIM_PWM_Stop()函数
该函数的作用是停止PWM信号的生成。
HAL_StatusTypeDef HAL_TIM_PWM_Stop(TIM_HandleTypeDef *htim, uint32_t Channel)
函数参数:htim 是需要停止的PWM信号的时钟
函数参数:Channel 通道TIMx要禁用的通道
此参数可以是以下值之一:
TIM_CHANNEL_1:选择TIMx通道2
TIM_CHANNEL_2:选择TIMx通道2
TIM_CHANNEL_3:选择TIMx通道2
TIM_CHANNEL_4:选择TIMx通道4
TIM_CHANNEL_5:选择TIMx通道5
TIM_CHANNEL_6:选择TIMx通道6
返回值:HAL状态














 811
811











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









