







目录
一、proteus原理图绘制
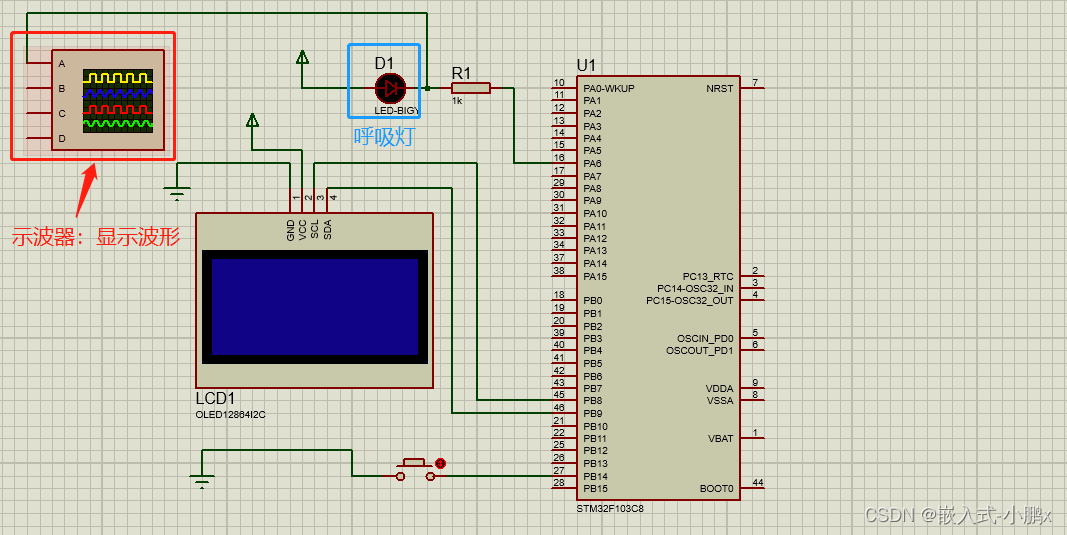
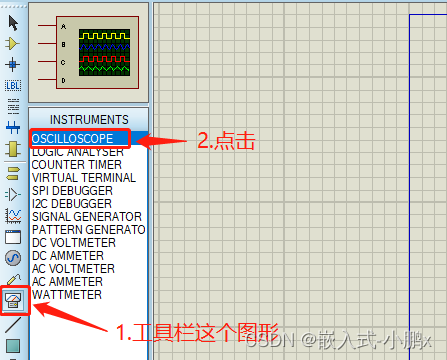
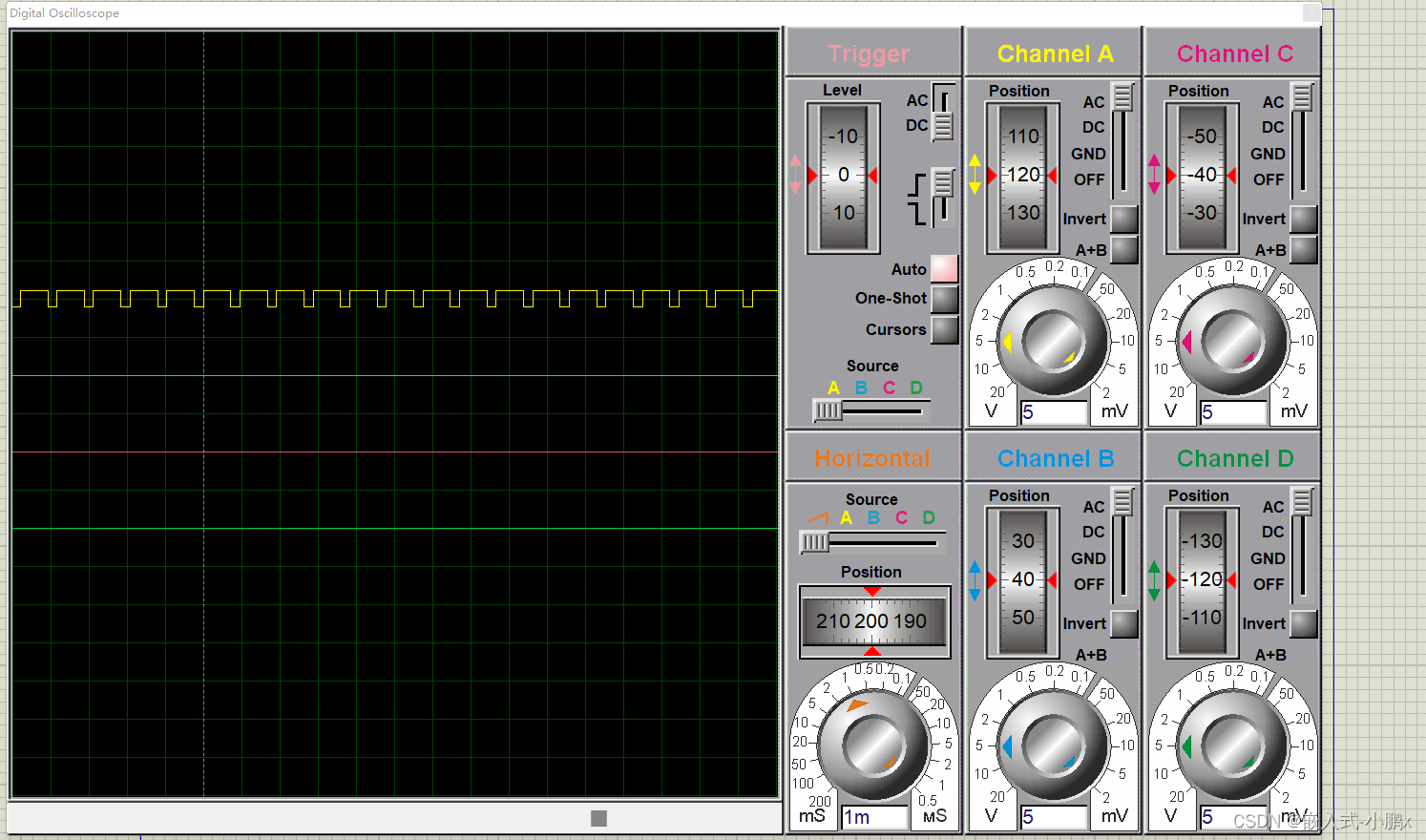
示波器的位置
二、代码的编写
1. PWM引脚的选择
查看下图引脚定义,选择定时器和定时器通道输出PWM
 以定时器3(TIM3)的通道1为例
以定时器3(TIM3)的通道1为例
在上图找到TIM3_CH1,TIM3表示定时器3,CH1表示通道1
由图可知对应引脚为:PA6
2. PWM.c文件
头文件
#include "PWM.h"
/* TIM1四通道 PA8、PA9、PA10、PA11 TIM2四通道 PA0、PA1、PA2、PA3
TIM3四通道 PA6、PA7、PB0、PB1 TIM4四通道 PB6、PB7、PB8、PB9 */
void PWM_TIM3_Init(void){ //PWM初始化
//GPIO的结构体定义,定义一个GPIO类型的结构体,名字为GPIO_InitStructure
GPIO_InitTypeDef GPIO_InitStructure;
//TIM_TimeBase的结构体定义,定义一个TIM_TimeBase类型的结构体,名字为TIM_TimeBaseInitStructure
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
//TIM_OC的结构体定义,定义一个TIM_OC类型的结构体,名字为TIM_OCInitStructure
TIM_OCInitTypeDef TIM_OCInitStructure;
//开启定时器3的时钟,注意是APB1(GPIO的是APB2)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
//开启GPIO的时钟,注意是APB2
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//GPIO引脚的重映射,TIM3_CH1重映射引脚到PB4
//RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
//GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM3, ENABLE);
//GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //GPIO_Pin_4;TIM3_CH1重映射引脚到PB4
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); //GPIO_Init(GPIOB, &GPIO_InitStructure); //PB4
//选择定时器的内部时钟源 TIM3
TIM_InternalClockConfig(TIM3);
//配置定时器时基单元:TIM_TimeBase
//选择时钟分频,可以选择1分频、2分频和4分频
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //TIM_CKD_DIV1:1分频
//选择定时器计数方式,可选择向上计数、向下计数、中心对齐计数
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM_CounterMode_Up:向上计数
//设置ARR,即定时器周期:TIM_Period,取值0-65535
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
//设置PSC,即定时器预分频器的值:TIM_Prescaler,取值0-65535
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
//高级定时器才用的到,重复计算器,先用不上赋值为0
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
//TIM_TimeBase初始化
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure);
//初始化配置定时器输出比较单元:TIM_OC
//设置输出比较的模式:TIM_OCMode_PWM1,PWM1模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
//设置输出比较的极性:TIM_OCPolarity_High;高极性:有效电平为高电平
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
//设置输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
//设置捕获比较寄存器 CCR 的值
TIM_OCInitStructure.TIM_Pulse = 0; //CCR
//初始化定时器3通道1
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
//使能定时器3
TIM_Cmd(TIM3, ENABLE);
}
设置捕获比较寄存器 CCR 的值
void PWM_TIM3_SetCompare1(uint16_t Compare) //TIM3 OC1
{
//占空比 Duty = CCR/(ARR+1)
TIM_SetCompare1(TIM3, Compare); //设置捕获比较寄存器 CCR 的值,由公式应该取值0-100
}
3. PWM.h头文件
#ifndef __PWM_H
#define __PWM_H
#include "stm32f10x.h"
void PWM_TIM3_Init(void);
void PWM_TIM3_SetCompare1(uint16_t Compare);
#endif
4. main.c文件
#include "stm32f10x.h"
#include "OLED.h" //OLED显示屏
#include "PWM.h" //PWM输出
#include "delay.h"
uint16_t i =0 ;
int main(void)
{
delay_init();
OLED_Init();
PWM_TIM3_Init();
OLED_ShowString(1,1,"PWM: ");
while(1){
for(i=0;i<=100;i++){ //PWM控制LED的亮度,变亮
PWM_SetCompare1(i); //设置CCR,占空比 Duty = CCR/(ARR+1)
delay_ms(10);
OLED_ShowNum(1, 6, i , 3);
}
for(i=0;i<=100;i++){ //PWM控制LED的亮度,变暗
PWM_SetCompare1(100-i);
OLED_ShowNum(1, 6, 100-i , 3);
delay_ms(10);
}
}
}
5. 效果展示
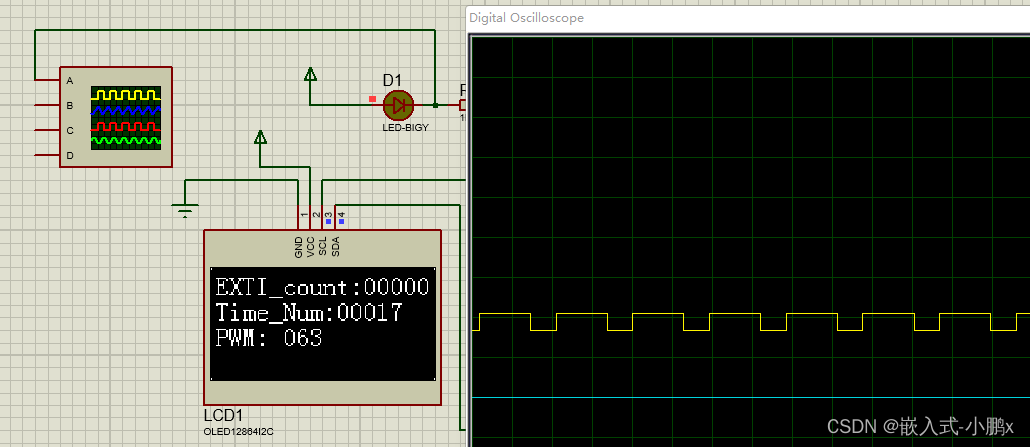
呼吸灯:输出的占空比随着时间变化,灯的亮度也随着时间变化
图1
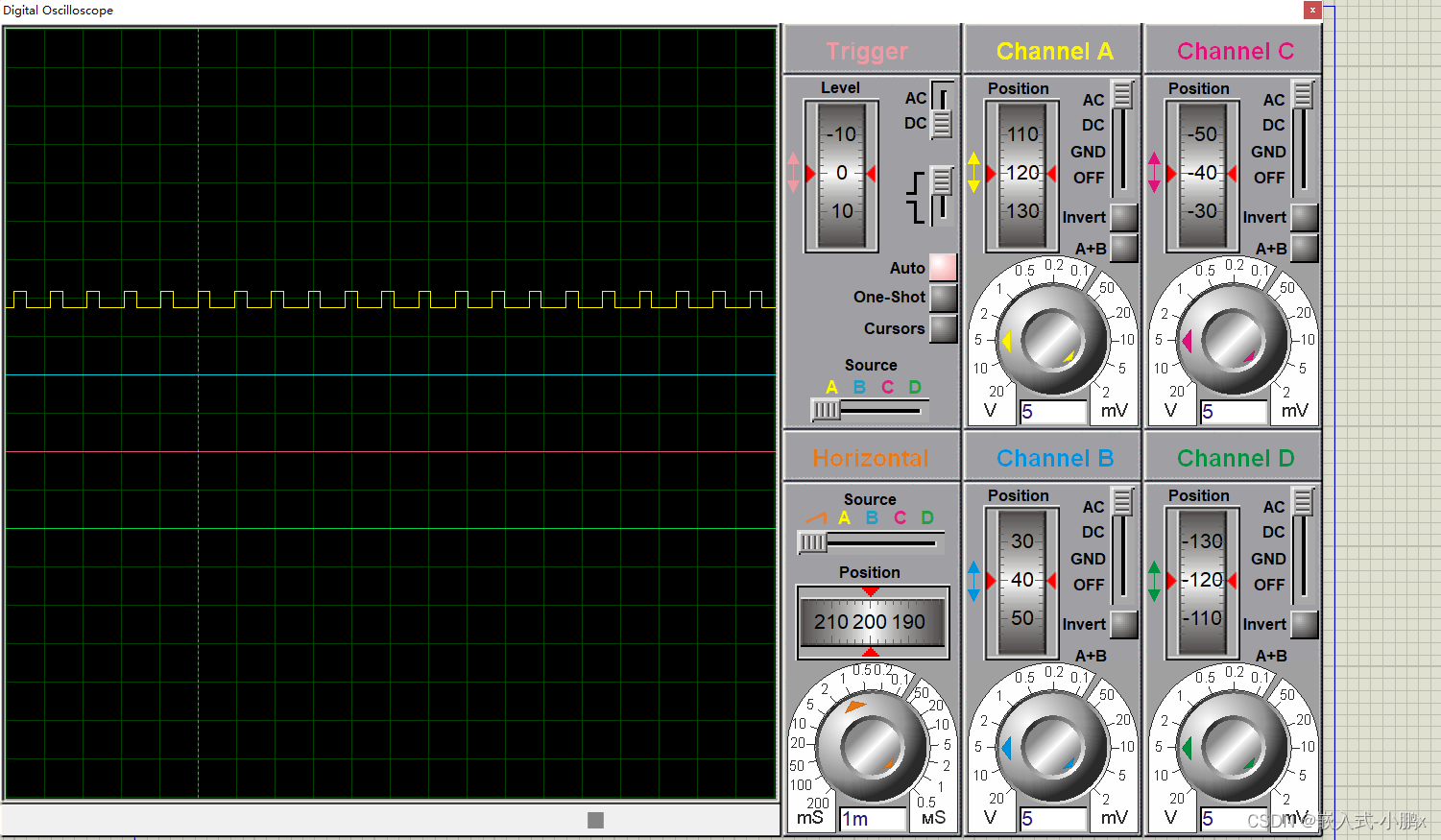
图2

三、项目(代码+仿真)分享链接
百度网盘
链接:https://pan.baidu.com/s/1pcVtAcER2mAwnQnyRL3aXQ
提取码:p8q4

















 177
177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









