







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
DR_CAN是我很喜欢的B站博主。本文的图片来自视频的截图。侵删。
DR_CAN出书了,《控制之美》,欢迎大家购书支持。
本文用于记录学习LQR算法的学习过程。
学习资源:DR_CAN from bilibili
现代控制理论-LQR控制器
一、LQR是什么?
二、知识回顾
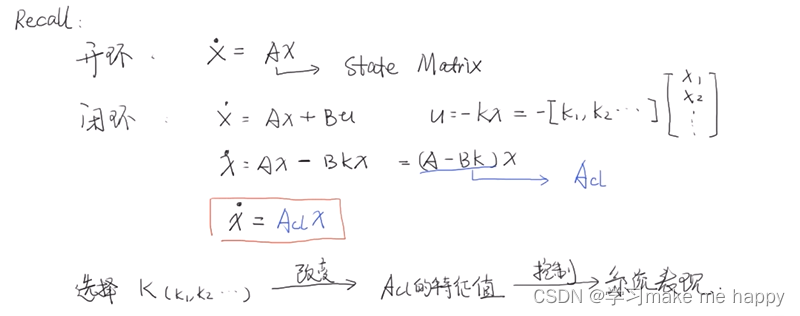
开环系统通过引入状态变量相关的负反馈成为闭环系统。
通过选择K值来改变Acl的特征值,来控制系统的表现。
三、还没想好标题
目标
- 如何确定特征值
- 什么样的特征值才是最好的。
方法
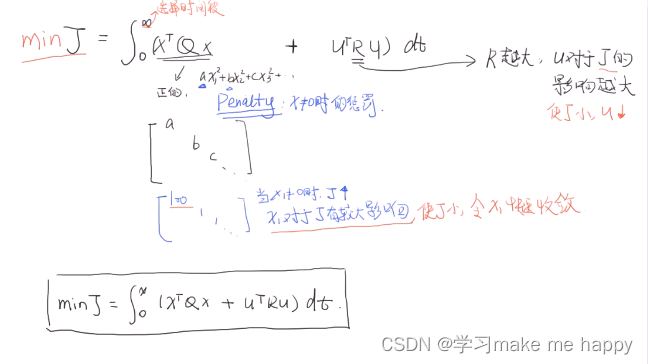
- 引入目标函数/能量函数
例子来了
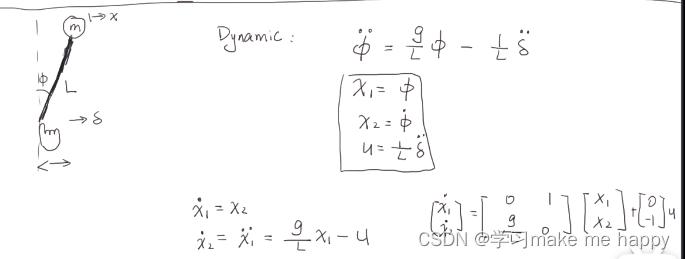
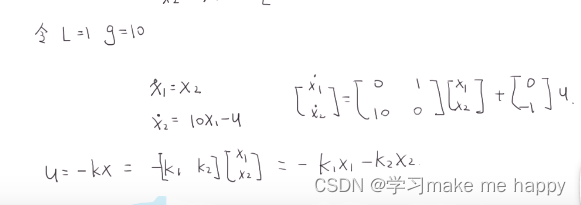
具体的参数和状态空间方程
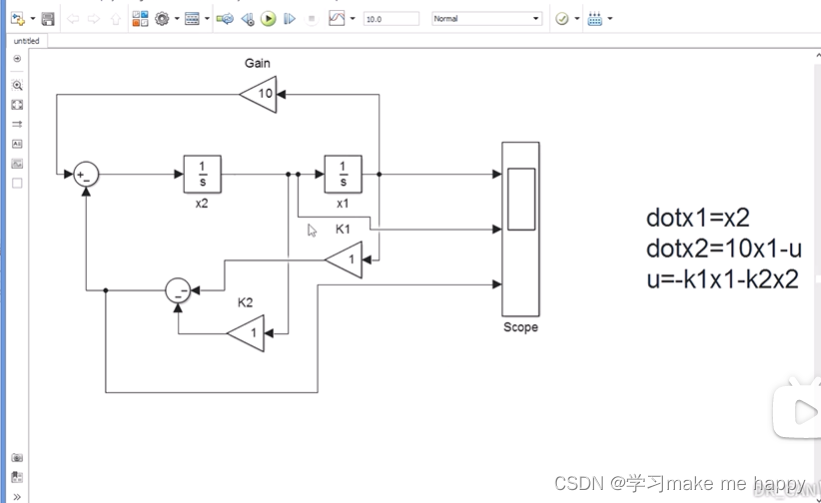
matlab/simulink仿真
搭建模型
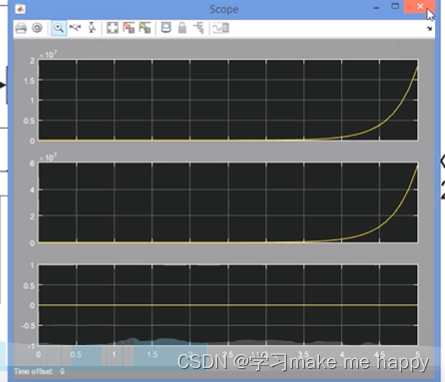
- 有初始状态,但没有控制的仿真
>>>clear all
>>> A = [0 1; 10 0]
>>> B = [0 -1]
>Q=[100 0; 0 1] #关心x1收敛速度
>R = .01
>K = lqr[A, B, Q, R]
- 运行后的结果
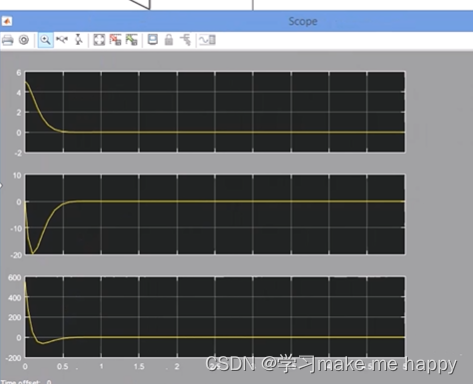
系统稳定了,真神奇
比较不同的Q R对系统的表现影响
参数的一些变化
Q = [1 0;0 1]
R = 100
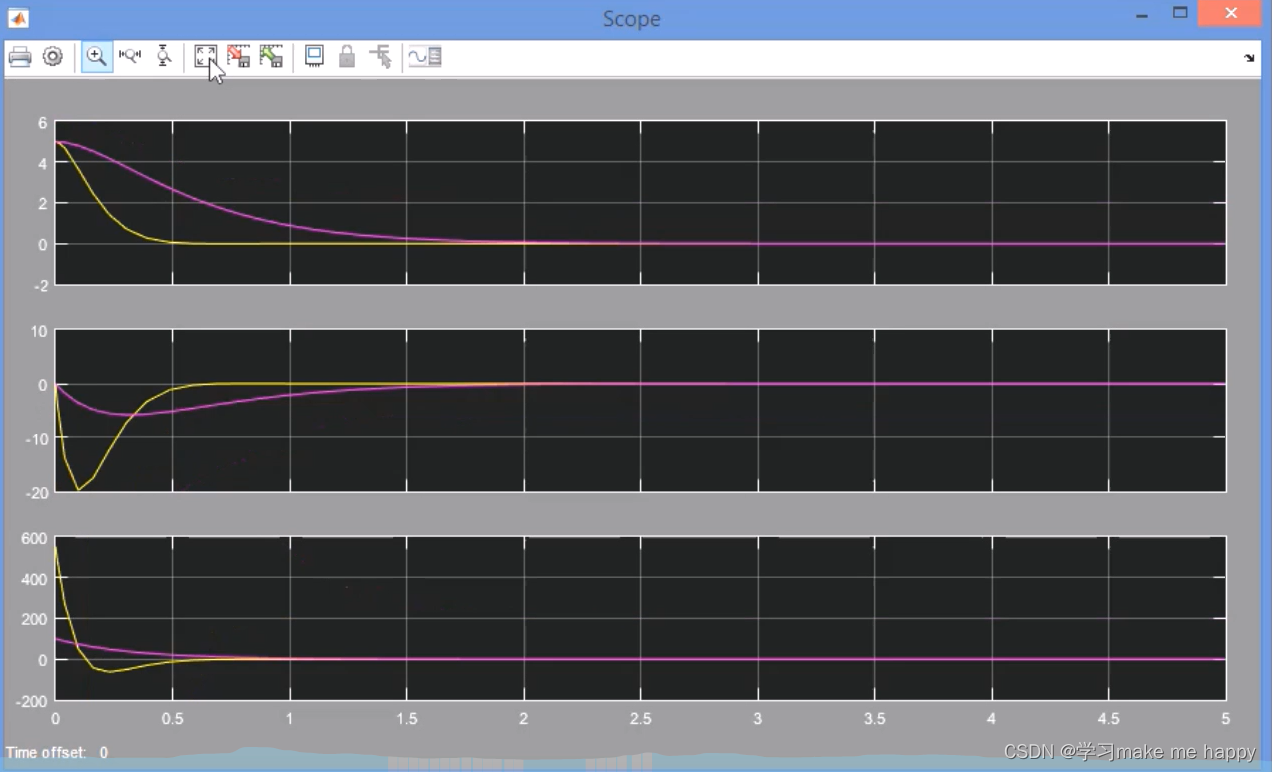
结果分析
- 黄线对应large Q 紫线对应large R
- 黄线收敛速度快
- 紫线输入平和
- 对于黄线,我们更看重收敛速度
- 对于紫线,我们更看重能耗问题
总结
举例子是个特别好的方法。
后面还要学习轨迹跟踪。















 4398
4398











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









