







一、背景意义
船舶目标检测在海洋安全、环境保护和航行管理中扮演着至关重要的角色。随着全球水域活动的日益增加,尤其是在渔业和运输行业,及时监测和识别渔船与拖船的行为变得尤为重要。这不仅有助于保障航行安全,防止碰撞事故,还能够有效管理水域资源,维护海洋生态环境。传统的船舶识别方法多依赖人工巡查和简单的图像处理算法,效率低下且易受环境因素影响,无法满足现代海洋监测的需求。因此,基于深度学习技术的自动化船舶目标检测系统应运而生,能够提供更高的准确率和实时性,为决策提供可靠的数据支持。
二、数据集
2.1数据采集
首先,需要大量的船舶类图像。为了获取这些数据,可以采取了以下几种方式:
-
网络爬虫:使用Python的
BeautifulSoup和Selenium编写了一个网络爬虫,从公开的图片网站、社交媒体和一些开源图片库中抓取了大量图片。在抓取过程中,确保每张图片都有清晰的目标物体,并且避免重复图片。 -
开源数据集:从网上下载了一些公开的数据集。这些数据集为项目提供了一个良好的起点,尤其在数据量不足时,它们可以极大地提高模型训练的效果。
-
自定义照片:为了增加数据的多样性,还拍摄了一些照片,包括不同的品种、背景和光照条件,以确保数据的丰富性和代表性。
数据清洗是对收集到的数据进行整理和过滤,以确保数据的质量和适用性。这个过程包括:
-
去除重复样本:检查数据集中是否存在重复的图像或视频,剔除多余的样本,避免模型在训练过程中受到偏差影响。重复数据可能导致模型过拟合,从而影响其性能。
-
检查图像和视频质量:剔除模糊、曝光不足或损坏的图像和视频,这些低质量的数据会对模型的训练产生负面影响。确保图像质量良好有助于提高模型特征提取的准确性。
-
分类整理:根据图像中的船舶特征对数据进行分类,分别将样本标记为“渔船”或“拖船”,确保每个类别的数据均匀分布,以便后续的标注和分析。
2.2数据标注
数据标注是数据集制作中的关键步骤,旨在为模型提供监督学习所需的标签信息。标注过程包括:
-
选择标注工具:使用专门的图像标注工具(如LabelImg、VGG Image Annotator等),能够提高标注的效率和准确性。选择合适的工具可以显著减少标注时间。
-
定义标注规范:在标注之前,应明确每个类别的标注标准,包括标注的类别和位置框的格式。这一规范在标注过程中需保持一致,以确保数据的有效性。
-
进行标注:对每张图像进行标注,记录渔船和拖船的相关信息,使用边界框标注工具框定每个目标的位置。该步骤需要仔细观察图像中的船舶状态,确保标注的准确性和完整性。
使用LabelImg进行数据集标注的过程相对复杂且工作量较大。首先,用户需要下载并安装LabelImg工具,确保其正常运行。启动LabelImg后,用户逐一打开每张与船舶目标检测相关的图像,仔细观察每个图像中的渔船和拖船。用户需使用矩形框工具对目标进行标注,确保框定准确,同时为每个框指定正确的类别标签(渔船或拖船)。此过程往往需要对每张图像进行反复调整,以确保标注的精确性和完整性。完成所有图像的标注后,用户需将标注结果导出为XML格式文件,作为后续模型训练的数据标签。
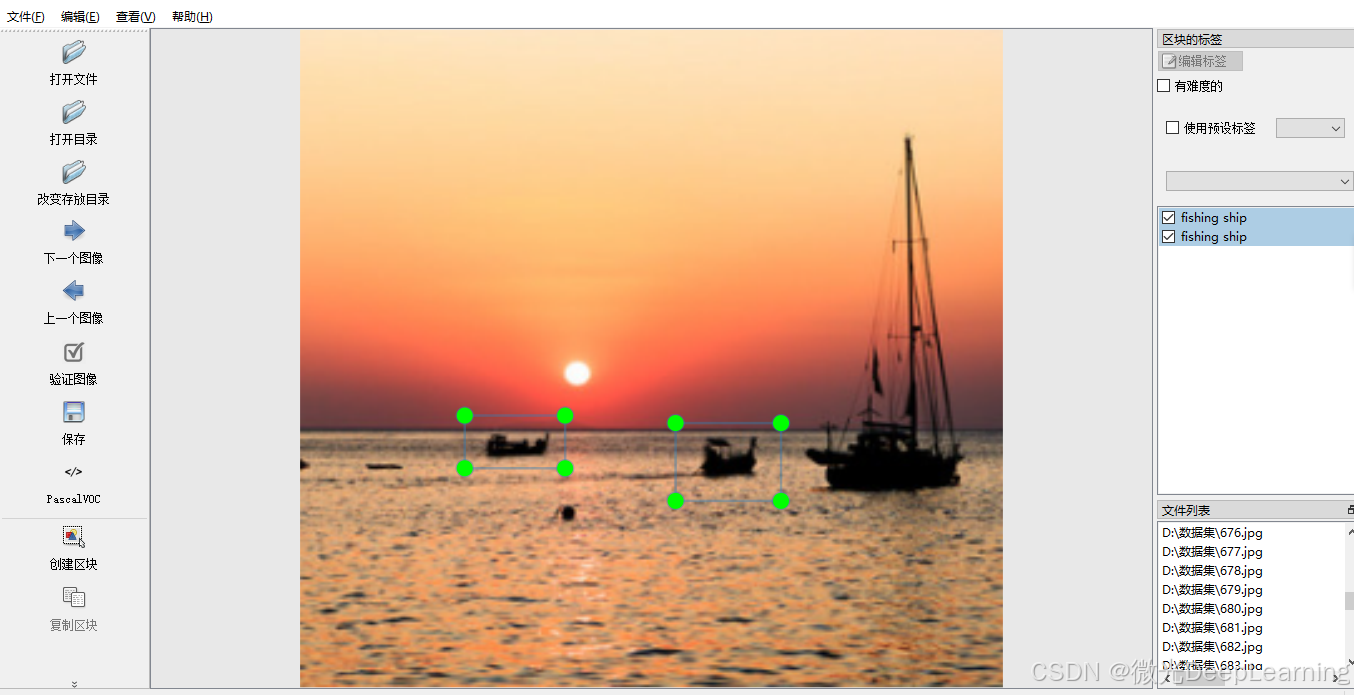
水面船舶图片,数据集中包含以下几种类别
- 渔船:用于捕捞和运输鱼类的船舶,通常在海域或河流中活动。
- 拖船:用于拖曳其他船只或浮动物体的船舶,起到辅助航行的重要作用。
2.3数据预处理
数据预处理是为模型训练准备数据的步骤,旨在提升模型的训练效率和效果。预处理过程包括:
-
图像缩放:将图像统一调整为相同的尺寸,以符合模型的输入要求。通常,YOLO模型要求输入的图像尺寸为416x416或608x608。
-
数据增强:通过旋转、翻转、裁剪、添加噪声等技术生成新的样本,增强数据集的多样性,防止模型过拟合。数据增强能够显著提高模型的鲁棒性,尤其在训练数据数量有限的情况下。
-
归一化处理:将图像像素值归一化到0到1之间,以减少不同图像之间的差异,帮助模型更快收敛,提高训练稳定性。
标注格式:
- VOC格式 (XML)
- YOLO格式 (TXT)
yolo_dataset/
│
├── train/
│ ├── images/
│ │ ├── image1.jpg
│ │ ├── image2.jpg
│ │ ├── ...
│ │
│ └── labels/
│ ├── image1.txt
│ ├── image2.txt
│ ├── ...
│
└── test...
└── valid...
voc_dataset/
│
├── train/
│ ├───├
│ │ ├── image1.xml
│ │ ├── image2.xml
│ │ ├── ...
│ │
│ └───├
│ ├── image1.jpg
│ ├── image2.jpg
│ ├── ...
│
└── test...
└── valid...三、模型训练
3.1理论技术
卷积神经网络(CNN)是一种专门设计用于处理图像数据的深度学习模型,其基本结构包含多个卷积层、池化层和全连接层。卷积层通过卷积操作对输入图像进行特征提取,使用多个卷积核对图像进行处理,从而生成特征图。这些特征图能够捕捉图像中的局部特征,如边缘、纹理和形状。池化层通常跟随卷积层,用于降低特征图的维度,从而减少计算量并防止过拟合。全连接层则将提取的特征整合,输出最终的分类结果。在船舶目标检测任务中,CNN能够有效识别渔船和拖船等目标的视觉特征,从而实现对不同类型船舶的准确分类。

CNN在算法模型中的优势主要体现在其强大的特征学习能力和适应性。通过多层的非线性变换,CNN能够自动学习从低层到高层的特征表示,避免了手动设计特征的繁琐过程。此外,CNN在处理高维图像数据时表现出色,能够捕捉复杂的图像模式。对于船舶目标检测任务,CNN通过学习大量的图像样本,识别出不同海域和河流环境下的渔船和拖船特征,显著提高检测的准确性和鲁棒性。

YOLO(You Only Look Once)是一种高效的目标检测算法,其设计理念是将目标检测作为回归问题处理。这一算法的基本结构包括一个卷积神经网络和一个全连接网络。在YOLO模型中,输入图像被划分为多个网格,每个网格负责预测其中心点落在该区域内的目标。YOLO模型通过回归计算每个网格单元的边界框和对应的类别概率,最终输出目标位置和类别。与传统目标检测方法相比,YOLO在检测速度上具有显著优势,能够实现实时处理,适合于流视频监测和动态场景下的目标检测。YOLO在算法模型中的优势在于其高效性和准确性。由于YOLO模型只需经过一次前向传播即可完成目标检测,因此其计算速度非常快,适用于实时应用场景。此外,YOLO通过全局推理来实现目标检测,因而能够更好地捕捉到目标间的上下文信息,减少了背景干扰带来的误检。在船舶目标检测任务中,YOLO能够快速识别和定位渔船和拖船,适应复杂的水域环境以及不同光照和天气条件下的变化。
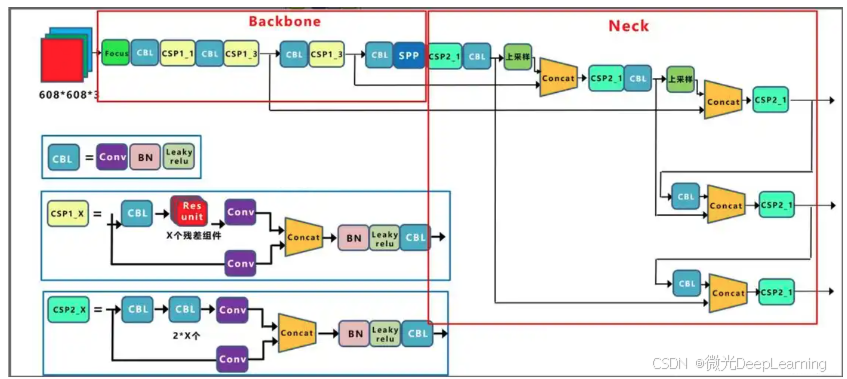
结合CNN与YOLO的结构,可以构建一个改进型的CNN-YOLO模型,以提高船舶目标检测的性能。该模型首先利用CNN对输入图像进行特征提取,获取渔船和拖船的低层特征。接下来,使用YOLO的结构将提取的特征输入到网络中,构建目标检测的框架。通过这种结合,模型能够同时利用局部特征和全局信息,从而提升对船舶目标的识别能力。这种改进模型的设计使得船舶目标检测变得更加全面,能够有效识别图像中的多个目标。CNN负责处理每一帧图像的特征,而YOLO则关注于目标的定位和分类,从而实现更精准的检测。此外,改进型CNN-YOLO模型可以通过数据增强和迁移学习等技术,进一步提升模型的性能与鲁棒性,为实际应用提供了更为可靠的解决方案。
3.2模型训练
1. 数据集预处理
在开发YOLO项目之前,需要配置开发环境并安装必要的依赖库。推荐使用Python作为主要编程语言,深度学习框架如TensorFlow或PyTorch。数据集的准备是YOLO项目开发中的关键步骤。首先需收集并标注与渔船和拖船相关的图像。使用标注工具(如LabelImg)生成YOLO格式的标签文件。数据集通常会划分为训练集、验证集和测试集,推荐的比例为70%用于训练,20%用于验证,10%用于测试。以下是数据集划分的示例代码:
import os
import shutil
from sklearn.model_selection import train_test_split
# 定义数据集路径
dataset_path = 'path/to/dataset'
images = os.listdir(dataset_path)
# 划分数据集
train_images, test_images = train_test_split(images, test_size=0.3, random_state=42)
val_images, test_images = train_test_split(test_images, test_size=0.33, random_state=42) # 20% for validation
# 创建新的目录以存放划分后的数据集
os.makedirs('train', exist_ok=True)
os.makedirs('val', exist_ok=True)
os.makedirs('test', exist_ok=True)
for image in train_images:
shutil.copy(os.path.join(dataset_path, image), 'train/')
for image in val_images:
shutil.copy(os.path.join(dataset_path, image), 'val/')
for image in test_images:
shutil.copy(os.path.join(dataset_path, image), 'test/')2. 模型训练
定义YOLO模型的配置文件,包括网络结构、超参数(如学习率、批量大小等)以及数据集的类别信息。
# yolov4.cfg
[net]
# 训练参数
batch=64
subdivisions=16
width=416
height=416
channels=3
# 学习率等参数
learning_rate=0.001
...
[yolo]
# 类别数量
classes=2 # 渔船、拖船
# 锚框
anchors=10,13, 16,30, 33,23, ...3. 模型评估
在配置完成后,使用准备好的数据集进行模型训练。训练过程包括数据读取、图像预处理、前向传播及反向传播等环节。完成模型训练后,接下来需要对模型进行测试,以评估其在新数据上的表现。测试集应与训练集和验证集保持独立,以确保模型通用性。通过模型进行预测时,需对测试图像进行相应的预处理,并获取预测结果。以下是训练的代码示例:
import tensorflow as tf
from tensorflow.keras.models import load_model
# 加载数据集
train_dataset = ... # 加载训练集
val_dataset = ... # 加载验证集
# 加载YOLO模型
model = load_model('yolo_model.h5')
# 训练模型
model.fit(train_dataset, validation_data=val_dataset, epochs=50)4. 模型优化
在测试完成后,可能需要对模型进行优化和调整,以提高其性能。这包括调整网络结构、增加训练数据、使用数据增强技术等。YOLO模型的常见优化方法是使用更小的学习率,以便在接近收敛时细致调整参数。此外,可以尝试不同的锚框配置,以适应不同尺寸的目标物体。优化过程通常需要反复进行多次实验,以找到最佳的训练配置。
四、总结
船舶目标检测系统,结合卷积神经网络(CNN)与YOLO算法,旨在实现对渔船和拖船的自动化识别。为实现这一目标,项目首先自制了一个包含渔船和拖船的多样化数据集,数据集的制作经历了严格的数据采集、清洗、标注和预处理流程,以确保数据的高质量和多样性。在数据采集阶段,采用了多种获取方式,包括实际拍摄和开放数据源,确保了数据的丰富性和代表性。数据清洗和标注阶段则着重剔除低质量样本,并采用LabelImg工具进行精确标注,为后续的模型训练提供了可靠的基础。在模型构建阶段,通过结合CNN和YOLO两种先进的深度学习算法,充分利用了CNN的特征提取能力和YOLO的高效检测性能,最终实现了对船舶目标的高准确率和实时性检测。

















 1077
1077

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









