






实验相关内容
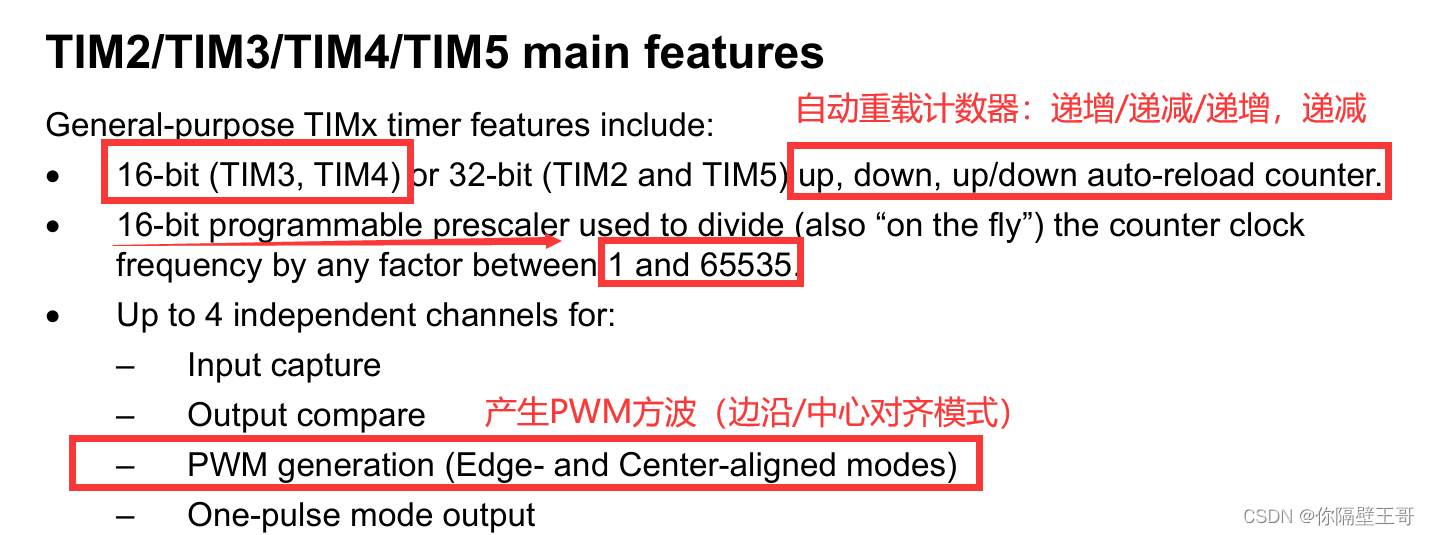
1.PWM:脉冲宽度调制定时器
2.脉冲:方波信号,高低电平的变化产生方波信号
3.周期:高低电平变化所需要的时间,单位:ms
4.频率:周期和频率之间是倒数关系,1S钟可以产生的多少个方波信号,单位:HZ
5.占空比:高电平占整个周期的百分比
6.本次实验中:PWM/风扇/马达
电路分析
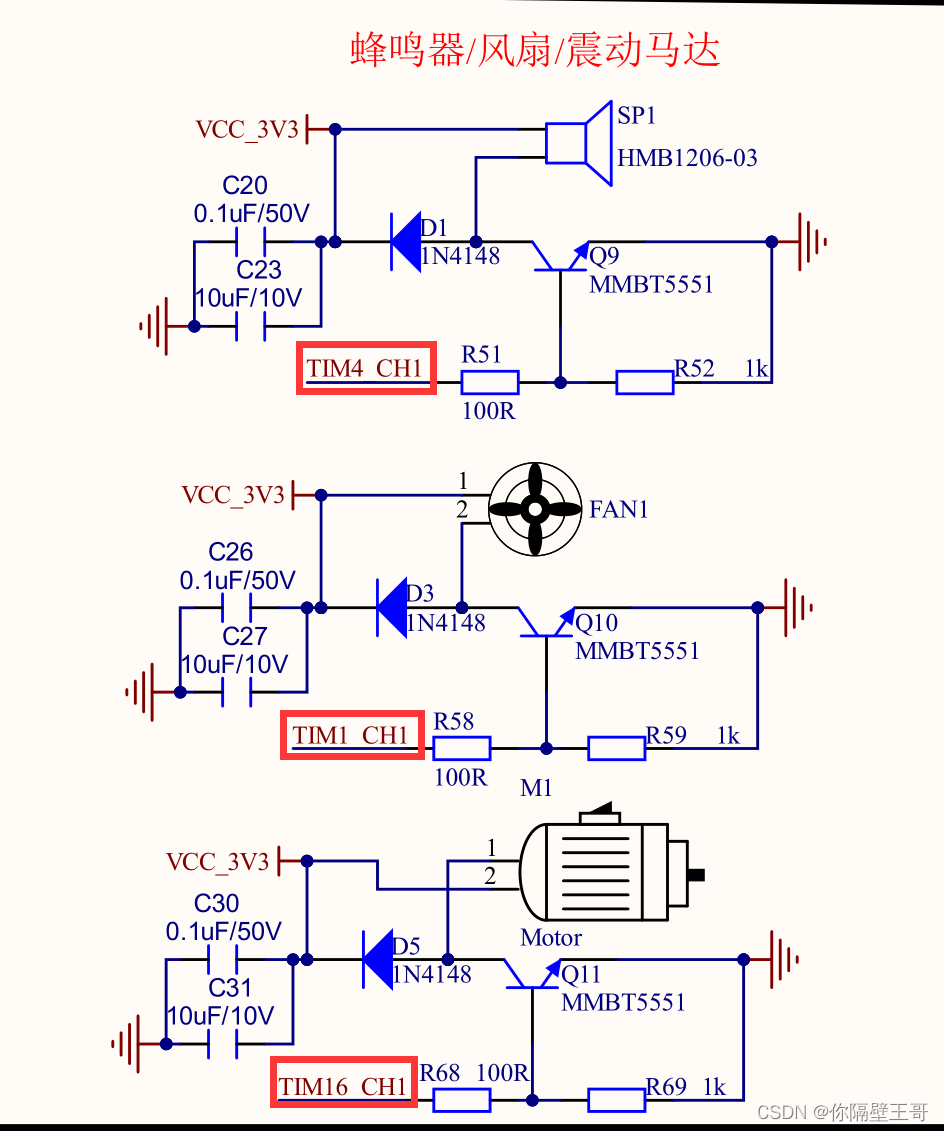
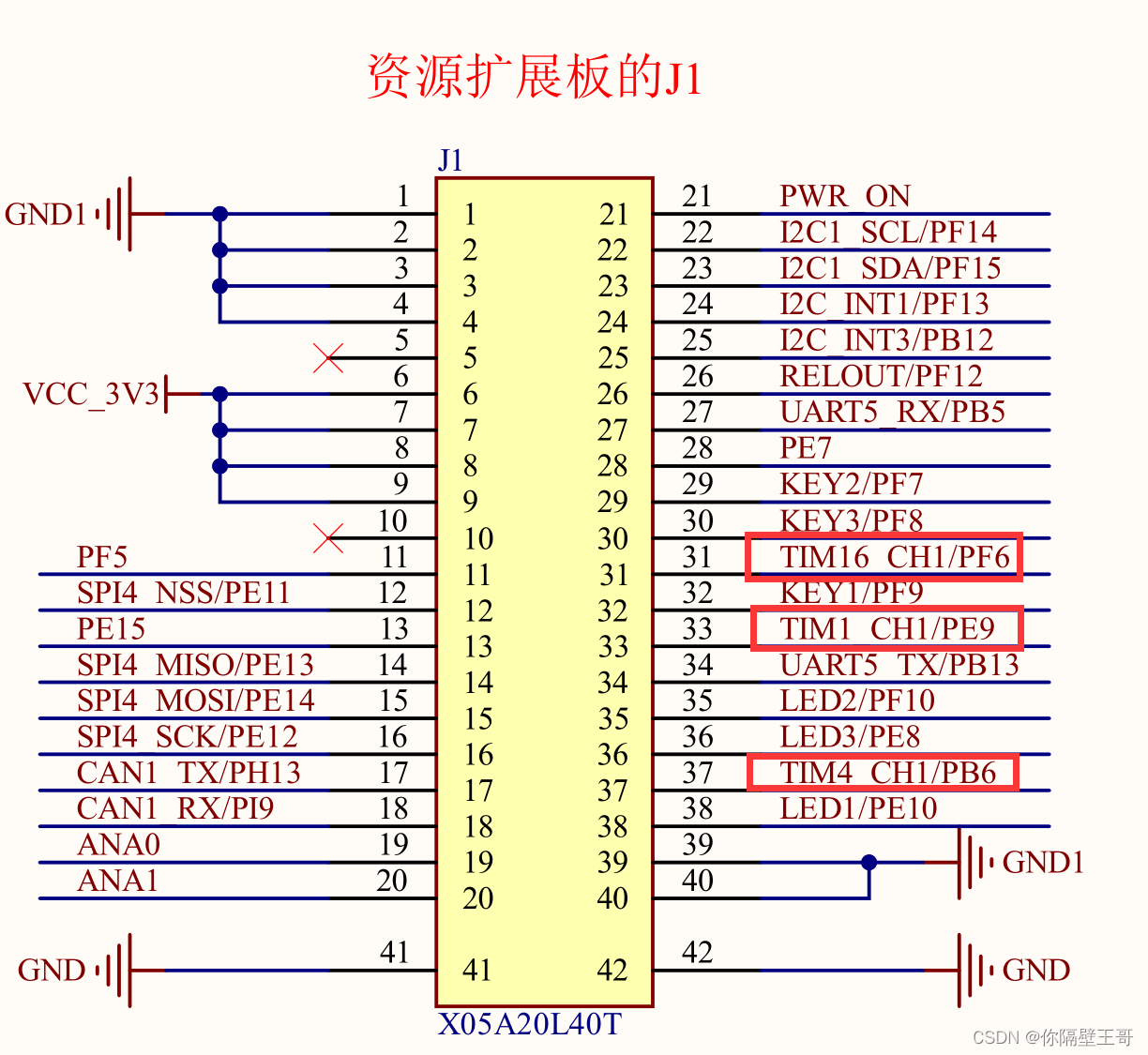
引脚对应接口分析
蜂鸣器:TIM4_CH1---->PB6
风扇:TIM1_CH1---->PE9
马达:TIM16_CH1---->PF6
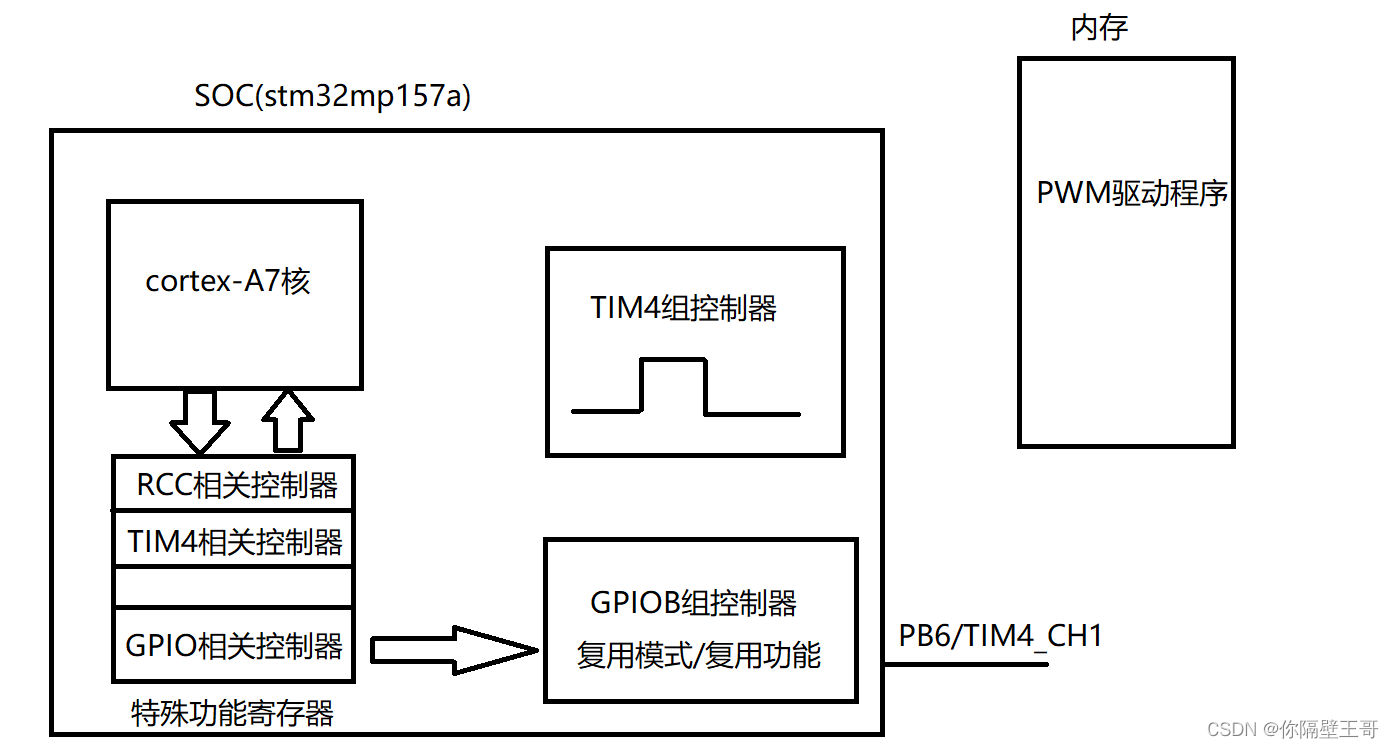
PWM(蜂鸣器)需求分析
1.分析RCC章节:相关控制器组使能
2.分析GPIO章节:复用模式/复用功能TIM4_CH1
3.分析TIM4章节:产生特定的方波
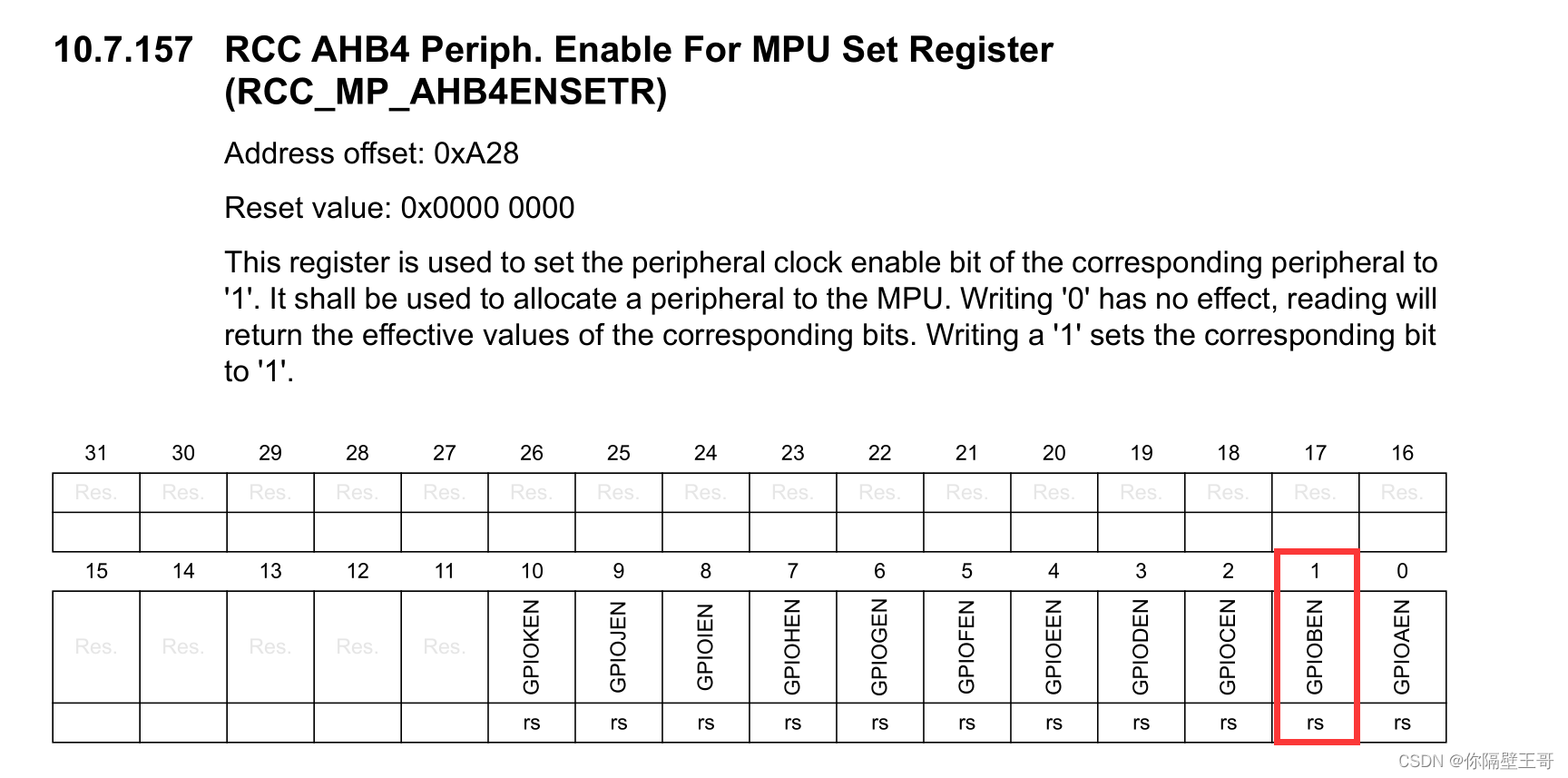
RCC章节分析
分析RCC_MP_AHB4ENSETR寄存器
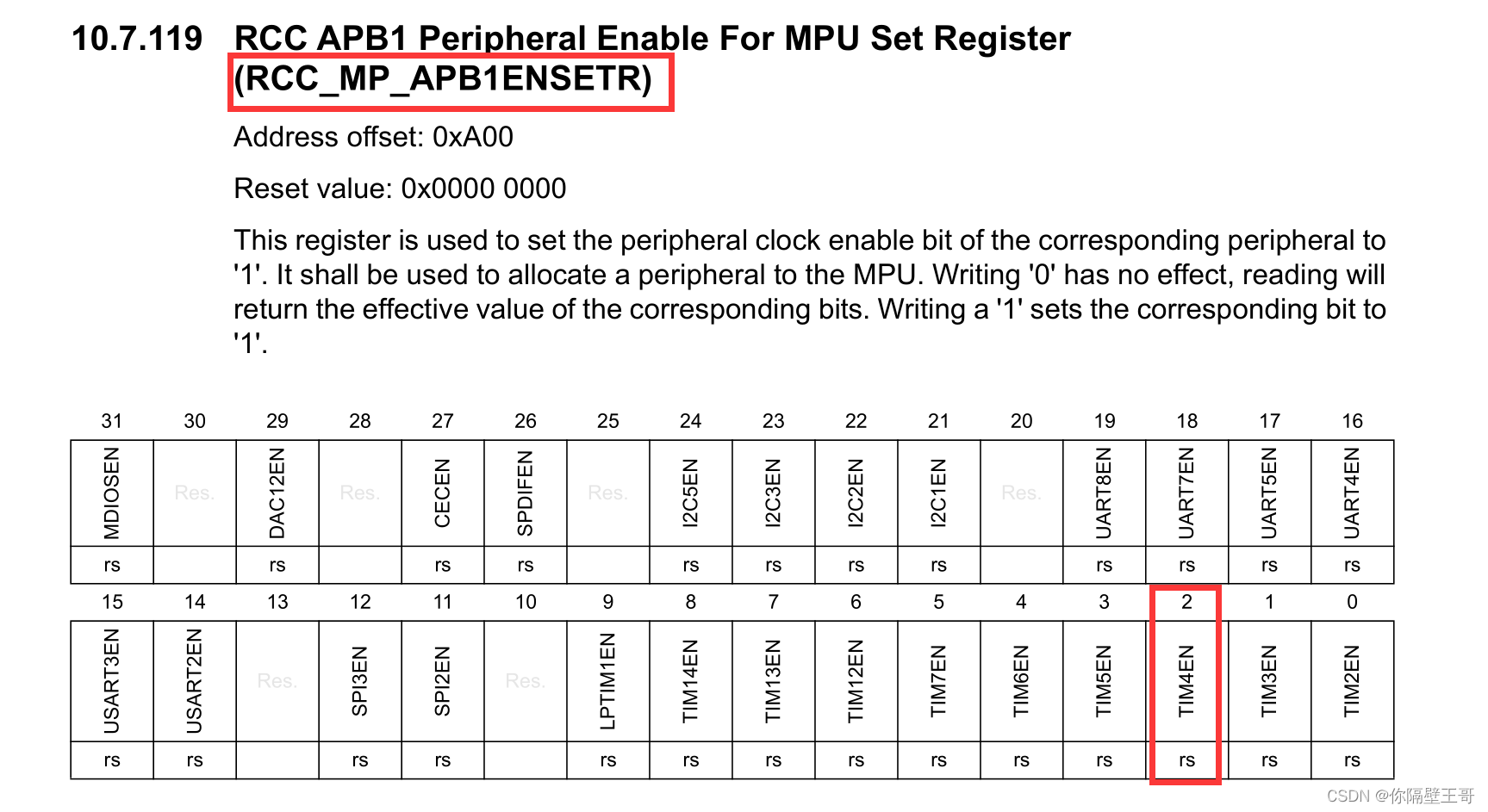
分析RCC_MP_APB1ENSETR寄存器
GPIO章节分析
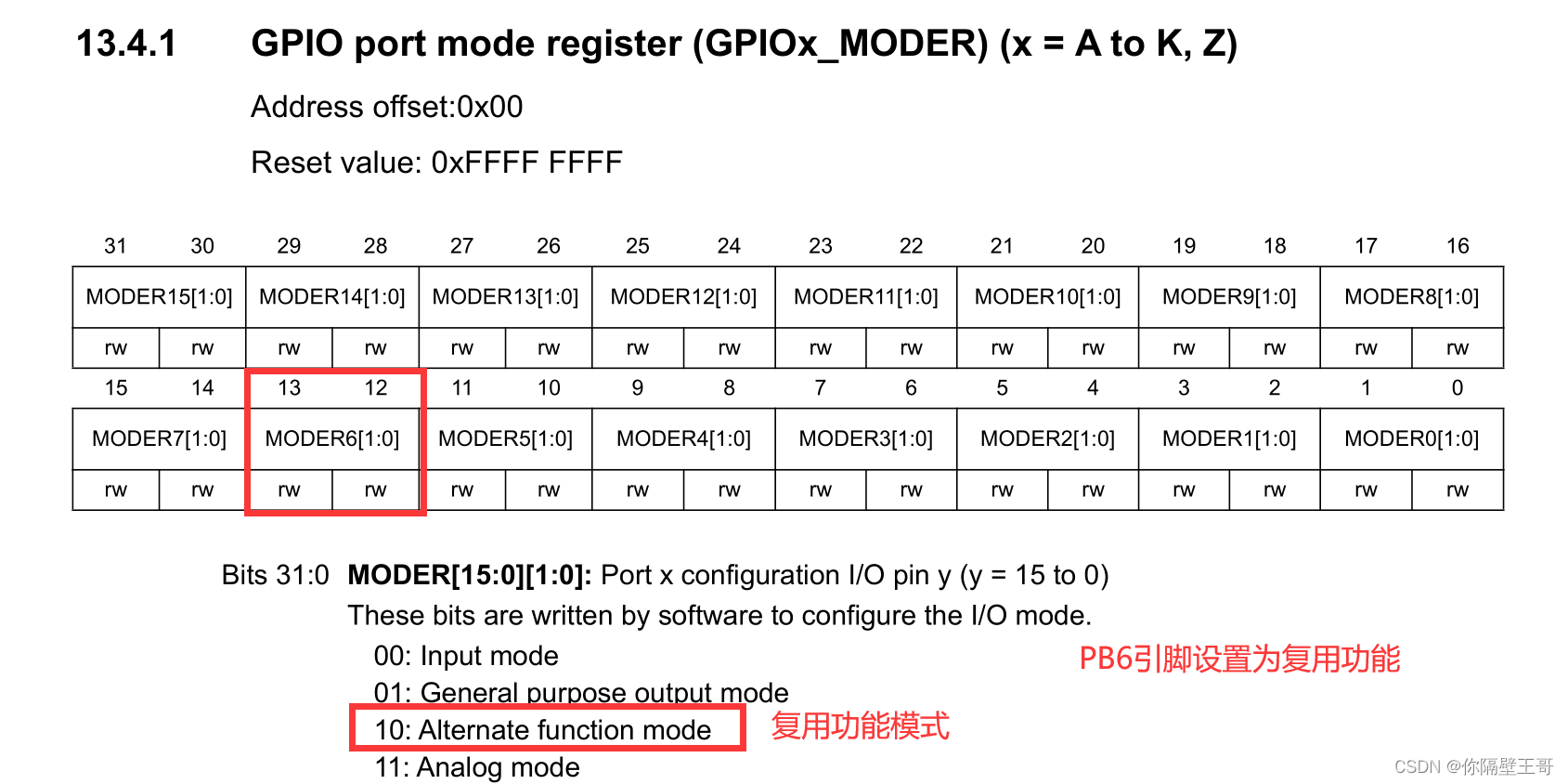
GPIOx_MODER
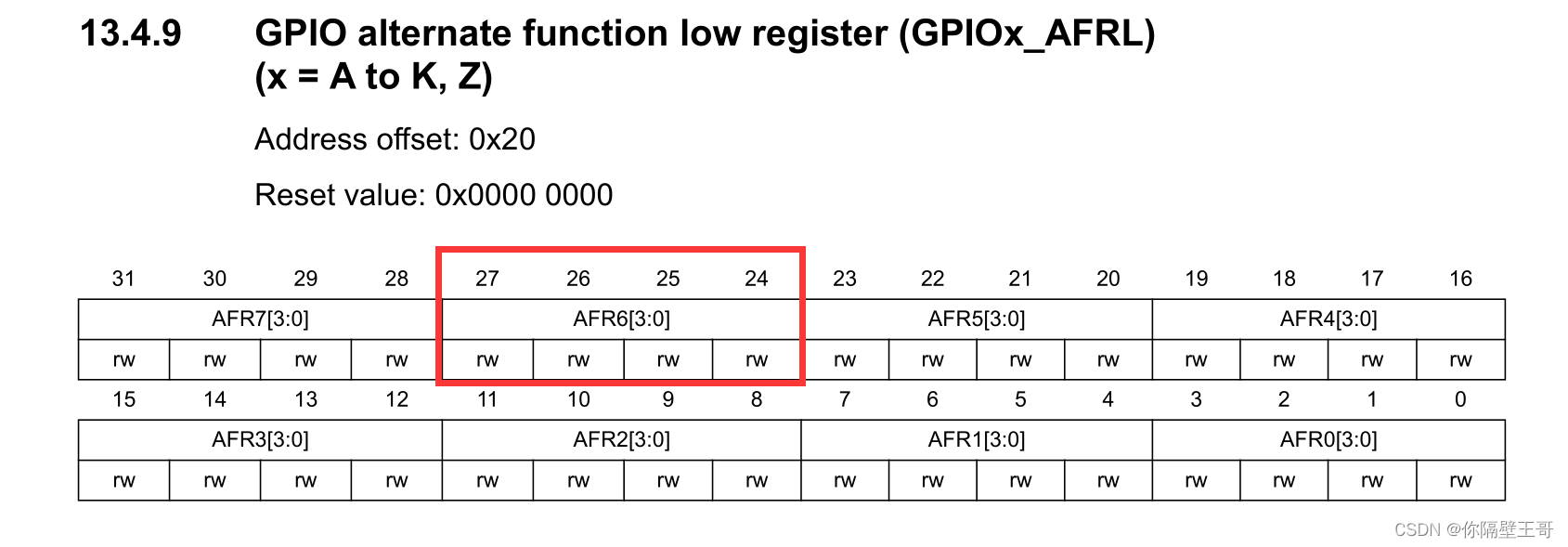
分析GPIOx_AFRL寄存器
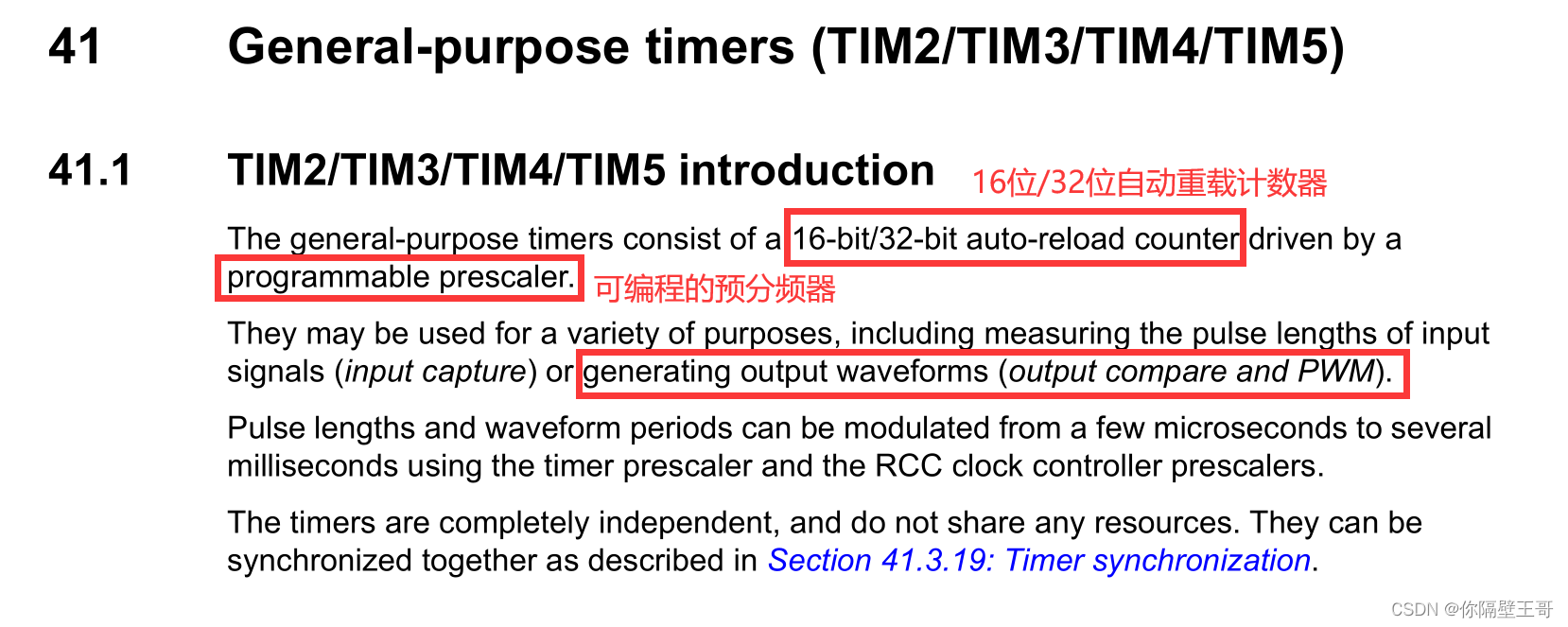
分析TIM4章节
寄存器分析
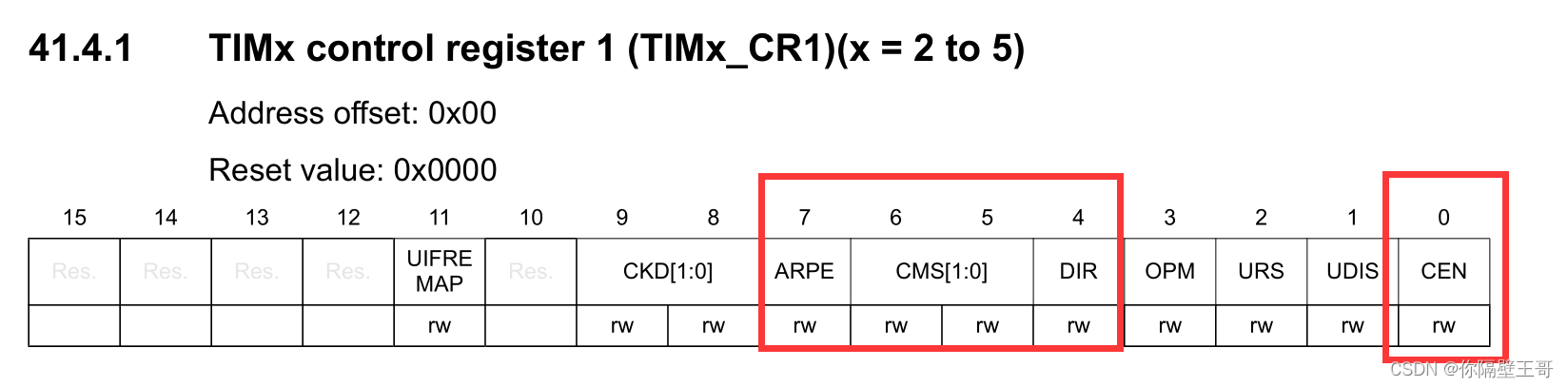
分析TIMx_CR1寄存器
TIM4_CR1寄存器配置tim计数器方式
TIM4_CR1[7] = 1 ------>自动重载计数器预加载使能
TIM4_CR1[6:5] = 00 ------>设置边沿对齐模式
TIM4_CR1[4] = 1 ------>设置递减计数器
TIM4_CR1[0] = 1 ------>设置计数器使能
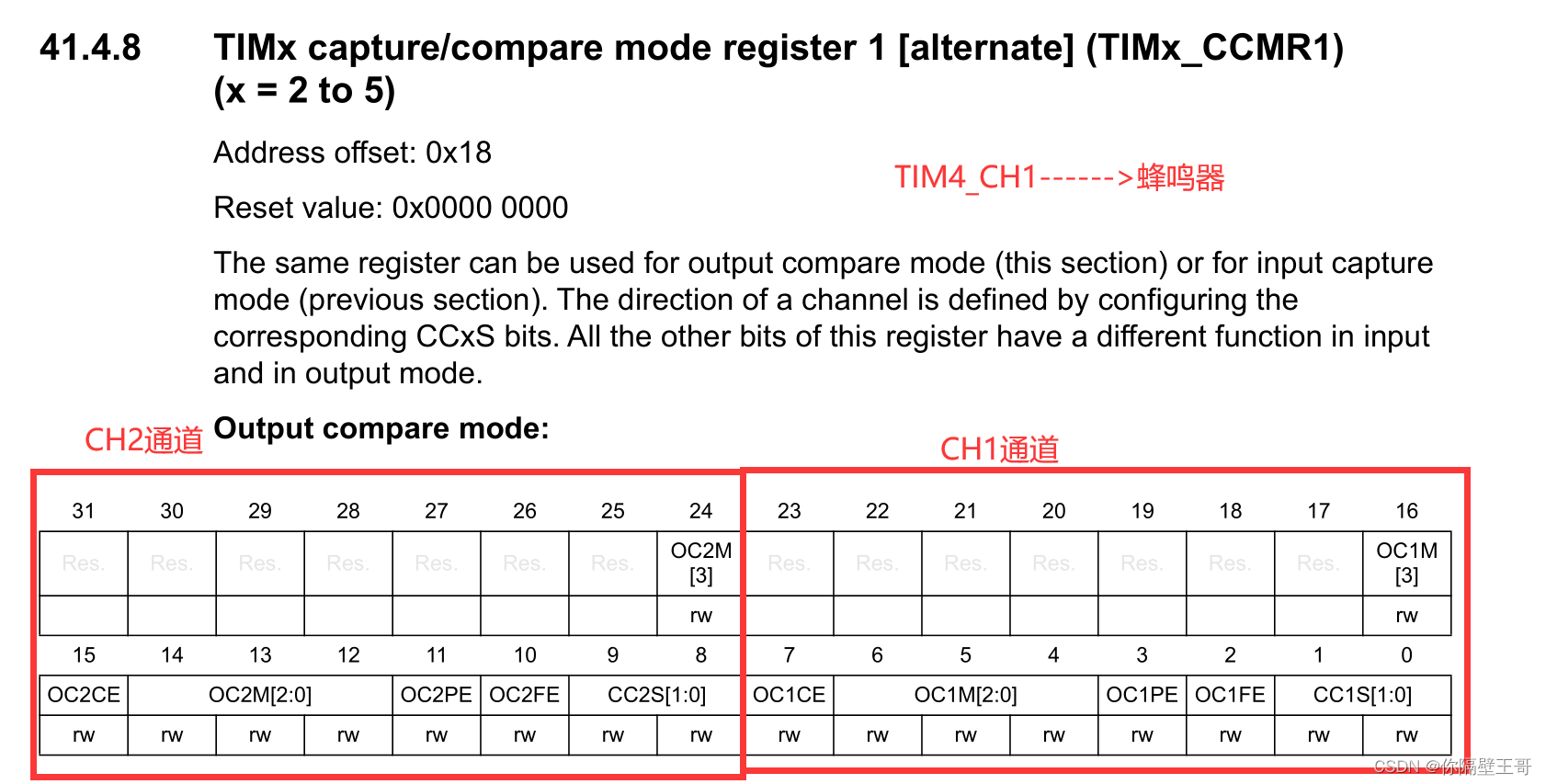
分析TIMx_CCMR1寄存器
TIM4_CCMR1[16][6:4] = 0110------>设置为PWM1模式
TIM4_CCMR1[3] = 1 ------>设置预加载使能
TIM4_CCMR1[1:0] = 00 ------>设置为输出模式
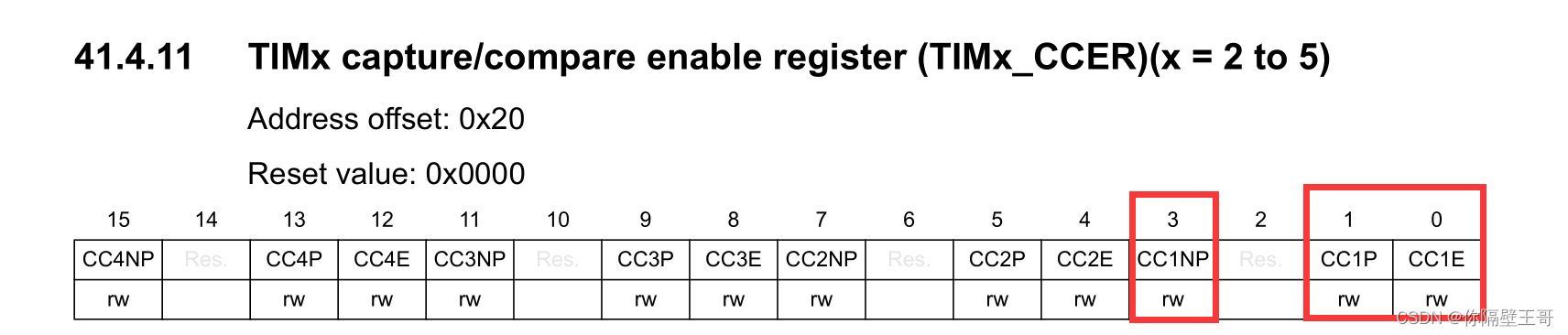
分析TIMx_CCER寄存器



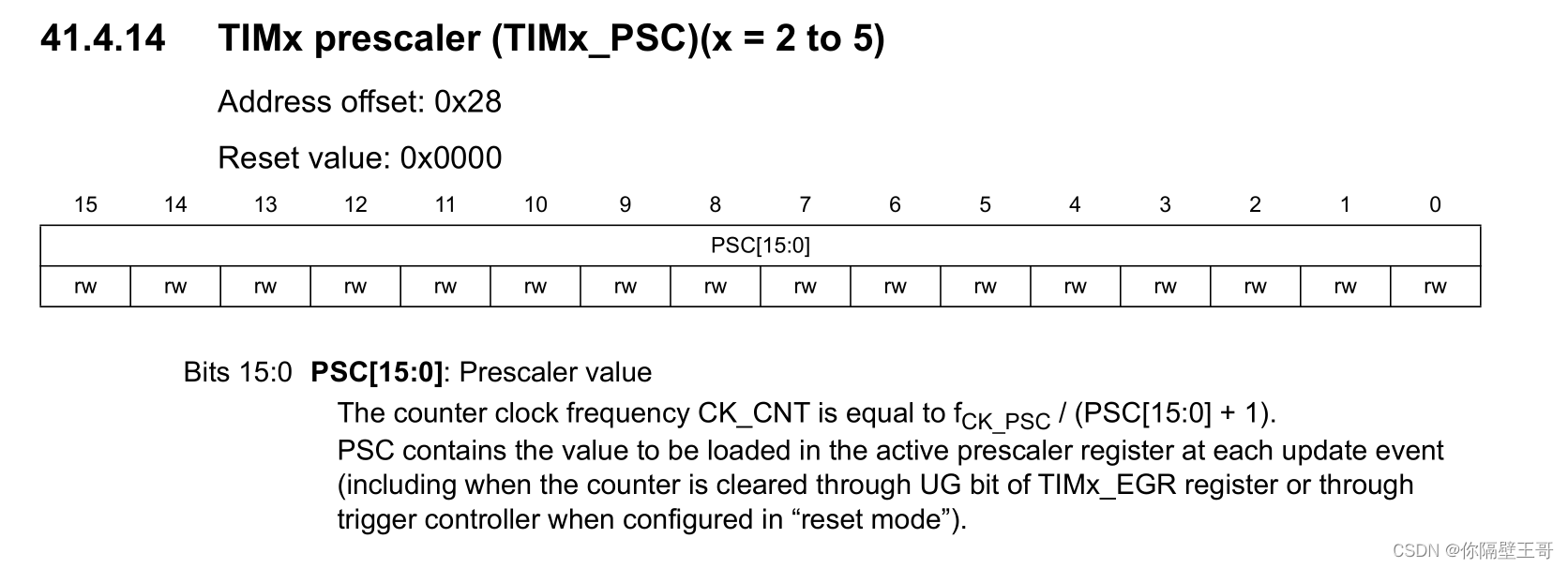
分析TIMx_PSC寄存器
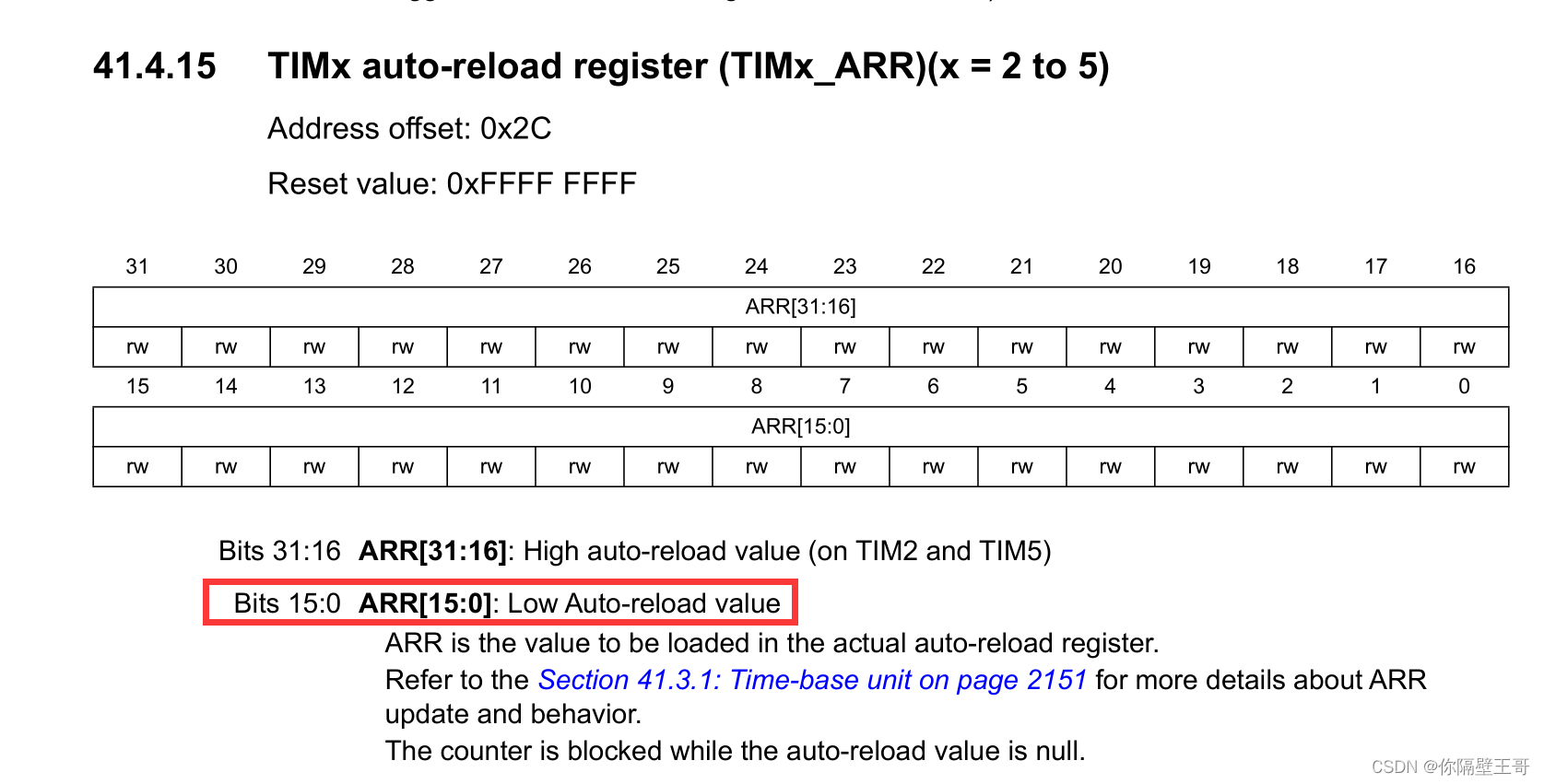
分析TIMx_ARR寄存器
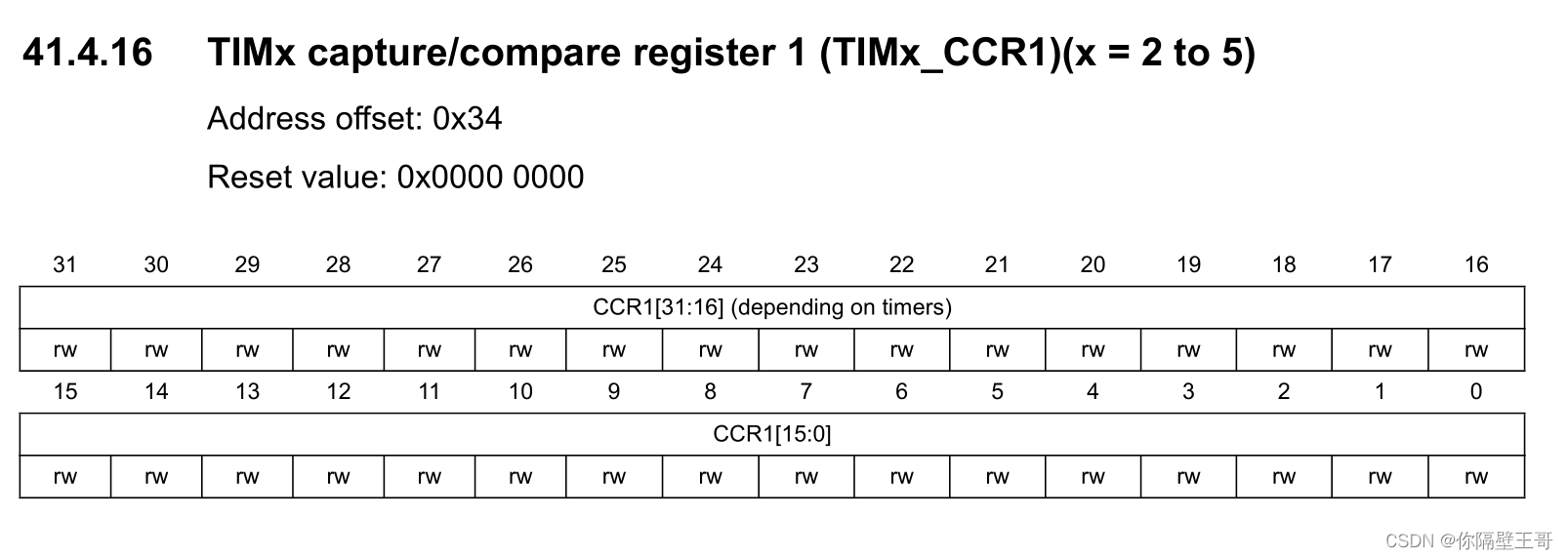
分析TIMx_CCR1寄存器
代码实现
功能函数
#include "pwm.h"
void pwm_init()
{
//----RCC-----
RCC->MP_AHB4ENSETR |= (0x1<<1);
RCC->MP_APB1ENSETR |= (0x1<<2);
//-----GPIO------
GPIOB->MODER &=(~(0x3<<12));
GPIOB->MODER |=(0x1<<13);
GPIOB->AFRL &=(~(0xf<<24));
GPIOB->AFRL |=(0x1<<25);
//----PSC------
TIM4->PSC &= (~(0xffff));
TIM4->PSC |= (0xD<<4);
//-----ARR-----
//配置寄存器数值
TIM4->ARR &= (~(0xffff));
TIM4->ARR |= (0x3E8);
//-----CCR1------
TIM4->CCR1 &= (~(0xffff));
TIM4->CCR1 |= (0x2BC);
//设置计数器使能
TIM4->CR1 |=0x1;
//-----CCMR1-----
//设置为PWM1模式
TIM4->CCMR1 &=(~(0x1<<16));
TIM4->CCMR1 &=(~(0x7<<4));
TIM4->CCMR1 |=(0x3<<5);
//设置预加载使能
TIM4->CCMR1 |=(0x1<<3);
//设置为输出模式
TIM4->CCMR1 &=(~(0x3));
//-----CCER-----
//设置为输出模式
TIM4->CCER &=(~(0x1<<3));
//配置起始状态高电平
TIM4->CCER &=(~(0x1<<1));
//配置输出使能
TIM4->CCER |= (0x1);
//----CR1-----
//使能自动重载计数器预加载
//边沿对其方式
//设置递减计数器
TIM4->CR1 &=(~(0xf<<4));
TIM4->CR1 |=(0x9<<4);
}
void pwm2_init()
{
//----RCC-----
RCC->MP_AHB4ENSETR |= (0x1<<4);
RCC->MP_APB2ENSETR |= (0x1);
//-----GPIO------
GPIOE->MODER &=(~(0x3<<18));
GPIOE->MODER |=(0x1<<19);
GPIOE->AFRH &=(~(0xf<<4));
GPIOE->AFRH |=(0x1<<4);
//----PSC------
TIM1->PSC &= (~(0xffff));
TIM1->PSC |= (0xD<<4);
//-----ARR-----
//配置寄存器数值
TIM1->ARR &= (~(0xffff));
TIM1->ARR |= (0x3E8);
//-----CCR1------
TIM1->CCR1 &= (~(0xffff));
TIM1->CCR1 |= (0x2BC);
//设置计数器使能
TIM1->CR1 |=0x1;
//-----CCMR1-----
//设置为PWM1模式
TIM1->CCMR1 &=(~(0x1<<16));
TIM1->CCMR1 &=(~(0x7<<4));
TIM1->CCMR1 |=(0x3<<5);
//设置预加载使能
TIM1->CCMR1 |=(0x1<<3);
//设置为输出模式
TIM1->CCMR1 &=(~(0x3));
//-----CCER-----
//设置为输出模式
TIM1->CCER &=(~(0x1<<3));
//配置起始状态高电平
TIM1->CCER &=(~(0x1<<1));
//配置输出使能
TIM1->CCER |= (0x1);
//----CR1-----
//使能自动重载计数器预加载
//边沿对其方式
//设置递减计数器
TIM1->CR1 &=(~(0xf<<4));
TIM1->CR1 |=(0x9<<4);
//风扇寄存器设置
TIM1->BDTR |=(0x1<<15);
}
void pwm3_init()
{
//----RCC-----
RCC->MP_AHB4ENSETR |= (0x1<<5);
RCC->MP_APB2ENSETR |= (0x1<<3);
//-----GPIO------
GPIOF->MODER &=(~(0x3<<12));
GPIOF->MODER |=(0x1<<13);
GPIOF->AFRL &=(~(0xf<<24));
GPIOF->AFRL |=(0x1<<24);
//----PSC------
TIM16->PSC &= (~(0xffff));
TIM16->PSC |= (0xD<<4);
//-----ARR-----
//配置寄存器数值
TIM16->ARR &= (~(0xffff));
TIM16->ARR |= (0x3E8);
//-----CCR1------
TIM16->CCR1 &= (~(0xffff));
TIM16->CCR1 |= (0x2BC);
//-----CCMR1-----
//设置为PWM1模式
TIM16->CCMR1 &=(~(0x1<<16));
TIM16->CCMR1 &=(~(0x7<<4));
TIM16->CCMR1 |=(0x3<<5);
//设置预加载使能
TIM16->CCMR1 |=(0x1<<3);
//设置为输出模式
TIM16->CCMR1 &=(~(0x3));
//-----CCER-----
//设置为输出模式
TIM16->CCER &=(~(0x1<<3));
//配置起始状态高电平
TIM16->CCER &=(~(0x1<<1));
//配置输出使能
TIM16->CCER |= (0x1);
//----CR1-----
//使能自动重载计数器预加载
//边沿对其方式
//设置递减计数器
TIM16->CR1 |= (0x1 << 7);
// TIM16->CR1 &= (~(0x3 << 5));
//TIM16->CR1 &= (~(0x1 << 4));
//设置计数器使能
TIM16->CR1 |= (0x1 << 0);
//马达寄存器设置
TIM16->BDTR |=(0x1<<15);
}
主函数
#include "../02-led-c/common/include/stm32mp1xx_gpio.h"
#include"pwm.h"
#include"../02-led-c/common/include/stm32mp1xx_tim.h"
int main()
{
pwm_init();
pwm2_init();
pwm3_init();
return 0;
}
经过实验成功将蜂鸣器,马达及风扇使能。














 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









