










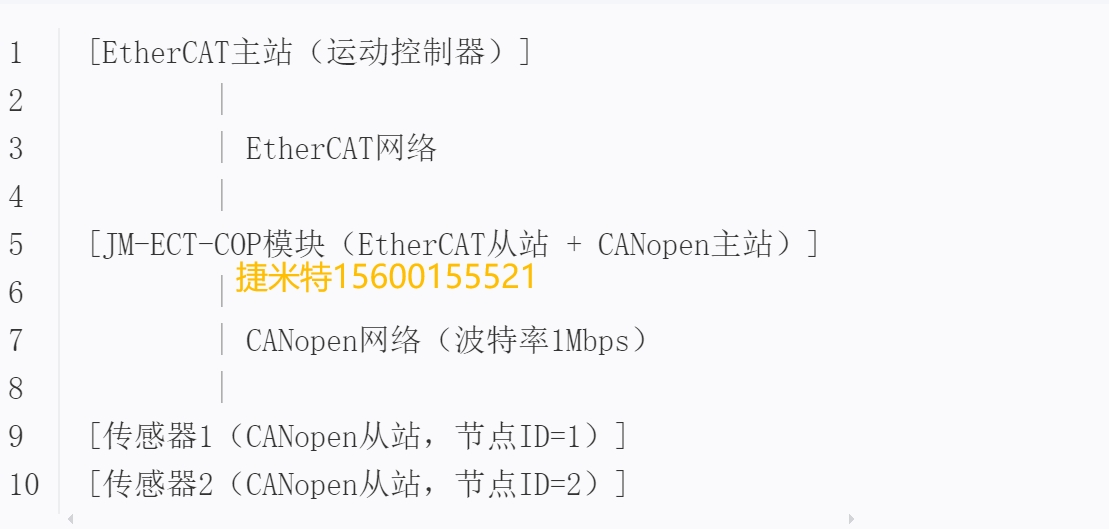
在某高端自动化制造工厂的生产线上,采用了先进的Ethercat运动控制器作为主站设备,以实现对生产线各个环节的精确控制和高速数据传输。然而,现场的许多外部传感器设备采用的是Canopen协议进行通信,这就导致了主站设备与传感器之间存在通信协议不兼容的问题。为了实现Ethercat主站对外部传感器信号的采集,确保生产线的高效稳定运行,工厂引入了捷米特JM-ECT-COP协议转换模块,用于实现Ethercat转Canopen的通信转换。实现以下功能:

· EtherCAT从站:接收主站控制指令
· CANopen主站:主动采集外部CANopen从站传感器数据
· 协议转换:将CANopen数据映射至EtherCAT过程数据对象(PDO)
硬件配置
1. 接线说明
o EtherCAT接口
§ 主站与JM-ECT-COP模块通过RJ45网线连接,启用菊花链拓扑。
§ 终端电阻:网络首尾节点启用120Ω终端电阻。
o CANopen接口
§ JM-ECT-COP模块的CAN_H/CAN_L端子连接传感器总线,线缆屏蔽层接地。
§ 波特率:1Mbps(需与传感器参数一致)。
2. 模块指示灯状态
o EtherCAT状态灯:绿色常亮表示主站通信正常。
o CANopen状态灯:闪烁表示总线激活,红色表示通信故障。
软件配置步骤
1.EtherCAT主站配置(以TwinCAT为例)
1. 扫描从站设备
o 在TwinCATSystemManager中扫描EtherCAT网络,识别JM-ECT-COP模块(需加载其ESI文件)。
o 确认模块的VendorID(0x00000XXX)和ProductCode(0xXXXXXXX)
2.JM-ECT-COP模块配置(使用JMTether配置工具)
1. EtherCAT从站参数
o 设置站地址(默认为0,自动分配)、看门狗时间(建议500ms)。
o
2. CANopen主站参数
o 波特率:1Mbps(需与传感器一致)。
o 节点扫描:自动扫描总线上的CANopen从站设备(节点ID=1和2)。
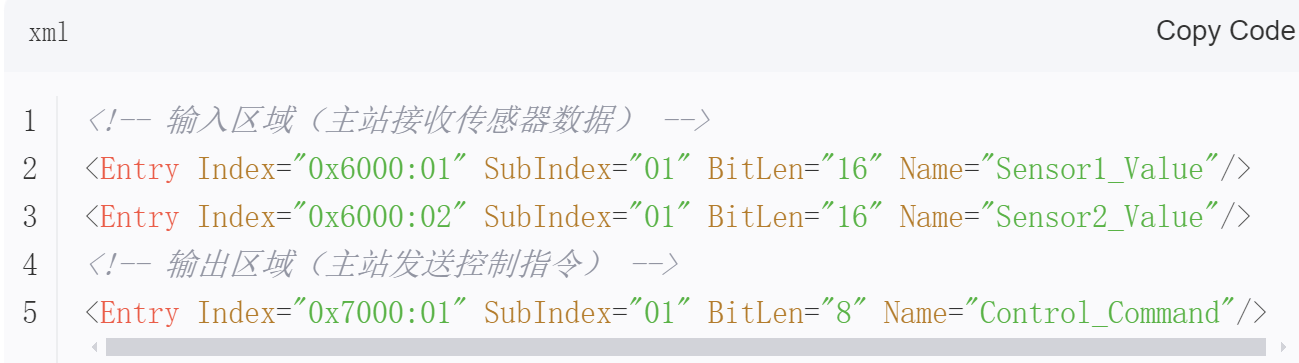
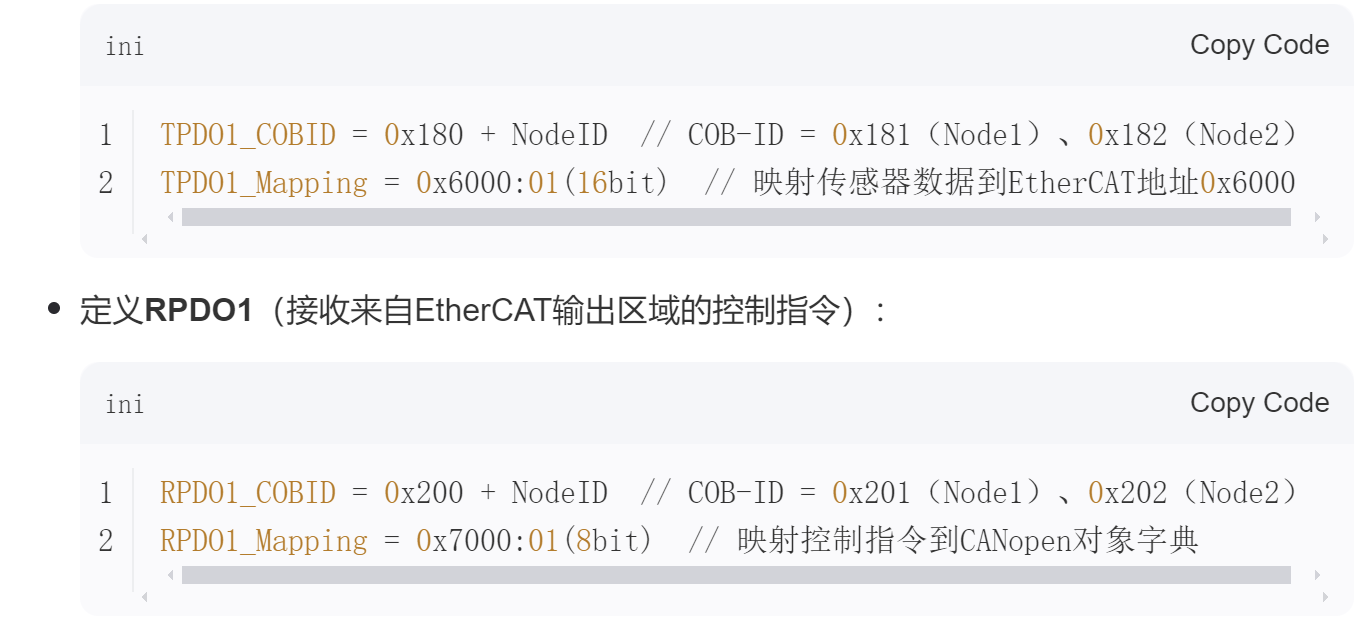
o PDO映射:
§ 定义TPDO1(发送到EtherCAT输入区域):
1. 保存并下载配置
o 将配置文件下载至模块,重启生效。
3.传感器配置(以CANopen编码器为例)
1. 节点ID设置
o 通过拨码开关或软件工具设置传感器节点ID(1和2)。
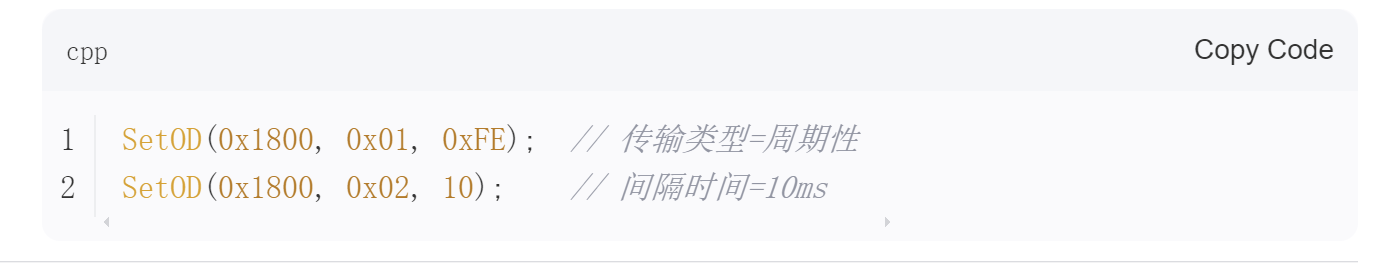
2. PDO通信参数
o 配置传感器TPDO1为周期性发送模式,传输间隔10ms:
通信测试与验证
1. EtherCAT主站状态监控
o 在TwinCATScope中监控地址0x6000:01和0x6000:02,确认传感器数据实时更新。
2. CANopen总线诊断
o 使用CANalyzer工具捕获CAN报文,验证COB-ID和数据一致性:
3. 实时性测试
o 测量EtherCAT输入数据延迟:从传感器触发到主站接收应小于2ms(1Mbps波特率下)。
方案优势
1. 实时性:EtherCAT周期同步(<1ms)+CANopen高速传输,满足运动控制需求。
2. 兼容性:支持标准CANopenDS301/DS402协议传感器。
3. 灵活性:通过PDO映射可扩展至32个CANopen从站设备。
总结:通过捷米特JM-ECT-COP模块实现EtherCAT与CANopen协议的无缝转换,解决了Ethercat主站设备与Canopen传感器之间的通信难题,为运动控制系统提供了高效、可靠的多传感器采集方案,适用于机器人、数控机床等高实时性场景。
通过引入捷米特JM-ECT-COP协议转换模块,成功实现了Ethercat转Canopen的通信转换,解决了Ethercat主站设备与Canopen传感器之间的通信难题。该解决方案不仅提高了生产效率和产品质量,还降低了系统集成的难度和成本。在工业自动化领域,捷米特JM-ECT-COP模块为Ethercat转Canopen的应用提供了一种可靠、高效的解决方案,具有广泛的推广应用价值。

















 1509
1509

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









