






一. 单目相机
1.1 相机内外参
1.1.1 相机外参
Vehicle系转换到摄像头camera系的位姿矩阵Tcv,为摄像头的外参数
1.1.2 相机内参
1. 针孔模型
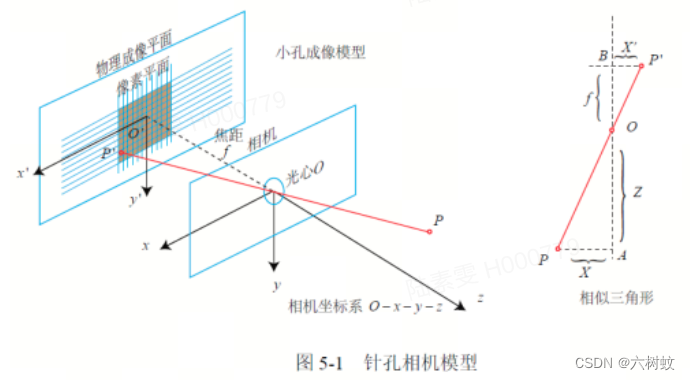
摄像头系下物体P坐标[x,y,z],成像平面上P'坐标[x′,y′,z′],焦距为f
相似三角形可得:
得:
设像素坐标在u轴上缩放a倍,在v轴上缩放b倍,原点平移[cx,cy],所以P'与uv之间关系:
所以:

K即为摄像头的内参
1.2 相机畸变
除畸变:uv经过内参先转换为归一化坐标,再计算去除畸变的归一化坐标,再经过内参计算新的uv像素
1.2.1 畸变类型
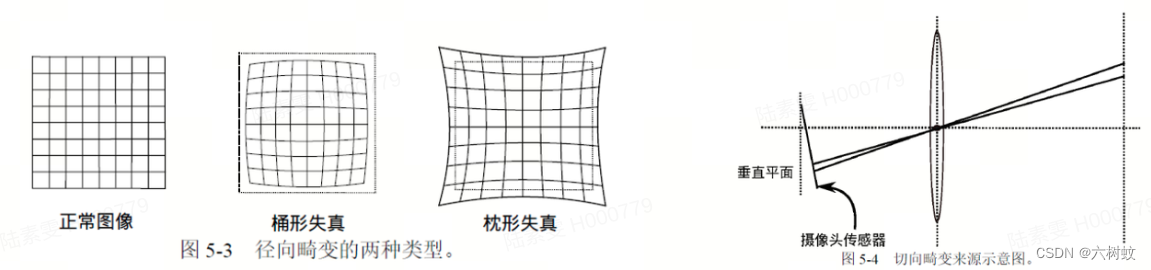
1.2.2 畸变原理
归一化平面上的点的坐标为[x,y],也可以表示为[r,θ],径向畸变即长度方向r发生了变化,切向畸变即水平夹角θ发生了变化,畸变后的坐标[xdistorted,ydistorted]为:
1.2.3 去畸变代码
/ 1.内参和畸变参数计算distor_x, distor_y
K = (cv::Mat_<double>(3,3) << fx,0,cx,
0,fy,cy,
0,0,1);
D = (cv::Mat_<double>(1,4) << k1,k2,p1,p2); // 这边读取四个畸变参数,应该是省略了6次以后的高次项
cv::initUndistortRectifyMap(K, D, cv::Mat_<double>::eye(3,3), K, cv::Size(3840,2160),
CV_32FC1, distor_x, distor_y);
// 2.图像去畸变
cv::remap(img_src, image_dst, distor_x, distor_y, cv::INTER_LINEAR);1.3 鱼眼相机模型
1.3.1 相机组成

1.3.2 成像模型
在研究鱼眼相机成像时,可以将上面的镜头组简化为一个球面
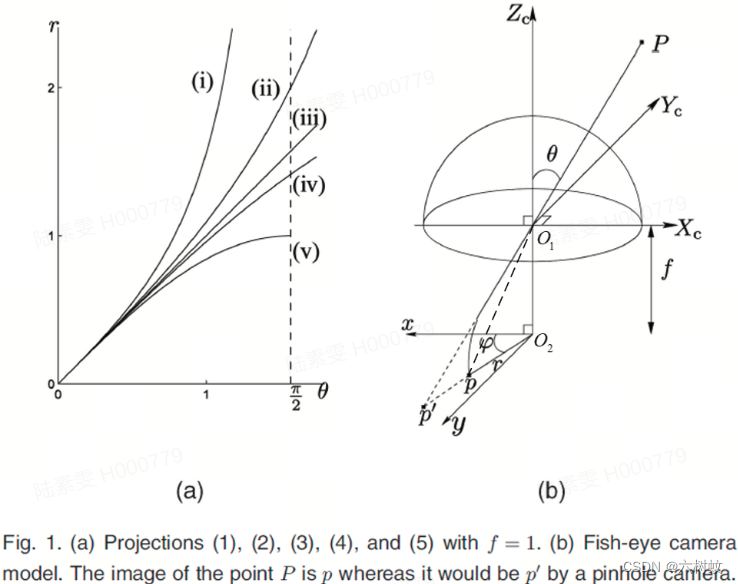
对于鱼眼相机,入射光线PO1经过镜头后会发生折射,因此P'的像点为p点,极坐标表示为(r,φ)。
为了将尽可能大的场景投影到有限的图像平面内,鱼眼相机会按照一定的投影函数来设计。
1. 透视映射(Perspective)
光心到成像面(相机的CCD)的距离为焦距f,空间点与光轴的夹角为θ,当ff固定,θθ增大到接近90度时,此时成像的入射光线与CCD平行,r为无穷大。
2. 等距映射(Equidistant)
r = f ∗ θ
成像点的位置R与入射角成正比,比例系数为f。与透射映射相比,解决了tan(90)为无穷大的问题。2D图像上θ对应的等高线为半径等比例变化的同心圆,最大的FOV可以达到360度,这是最简单的一种鱼眼模型。
3. 等立体角投影(Equisolid angle)
r = 2f ∗ sinθ/2
4. 正交投影(Orthographic)
r = 2f ∗ sinθ
与透射映射不同,不会产生近大远小的透视效果。2D图像上θ对应的等高线从0到90度越来越密。最大的FOV是180度。
5. 球极投影(Stereographic)
r = 2f ∗ tanθ/2
是一种将圆球面投影至平面的映射,在几何学里也称共型映射conformal mapping,是一种保角映射。
实际相机镜头的加工无法严格按照上面介绍的映射模型精确实现,一般用θ的多项式来近似r函数
所以对于鱼眼相机,需要标定的内参为焦距f,图像中光心位置Co和多项式映射函数的系数ki(一般的文档中称为径向畸变参数),有的还会引入切向畸变参数pi.引入过多的参数可能会导致优化求解过程陷入局部最小值,所以OpenCV文档中默认畸变参数(distortion coefficients) 为k1,k2,k3,k4。
在《A generic camera model and calibration method kannala brandt》中多项式是这样的:
1.3.3 3D to uv成像过程
1. give P(X,Y,Z)
2. 归一化到球平面
3. 求入射角θ和φ
4. 基于畸变模型得到r(θ)
5. O2像平面上坐标
6. 图像像素坐标(u,v)
1.3.4 成像过程代码
Eigen::Vector2f project(const Eigen::Vector3f &v3D) // 摄像头系下的点坐标
{
const float x2_plus_y2 = v3D[0] * v3D[0] + v3D[1] * v3D[1];
const float theta = atan2f(sqrtf(x2_plus_y2), v3D[2]);
const float psi = atan2f(v3D[1], v3D[0]);
const float theta2 = theta * theta;
const float theta3 = theta * theta2;
const float theta5 = theta3 * theta2;
const float theta7 = theta5 * theta2;
const float theta9 = theta7 * theta2;
const float r = theta + mvParameters[4] * theta3 + mvParameters[5] * theta5
+ mvParameters[6] * theta7 + mvParameters[7] * theta9;
Eigen::Vector2f res;
res[0] = mvParameters[0] * r * cos(psi) + mvParameters[2];
res[1] = mvParameters[1] * r * sin(psi) + mvParameters[3];
return res;
}1.4 变换
1.4.1 欧式变换
移动+旋转的变换
1.4.2 相似变换
比欧式变换多一个自由度,允许缩放
1.4.3 仿射变换
仿射变换是平面变换,是二维坐标(x,y)的转换
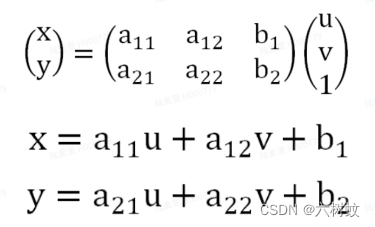
仿射变换的方程组有6个未知数,所以要求解就需要找到3组映射点,三个点刚好确定一个平面
1.4.4 透视变换
透视变换是空间变换,是三维坐标(x,y,z)的变换
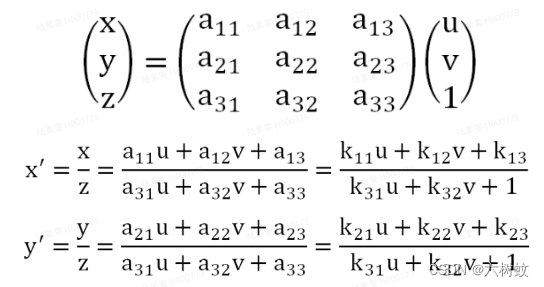
视变换的方程组有8个未知数,所以要求解就需要找到4组映射点,四个点就刚好确定了一个三维空间
计算透视变换的H矩阵,可以用opencv中的getPerspectiveTransform函数
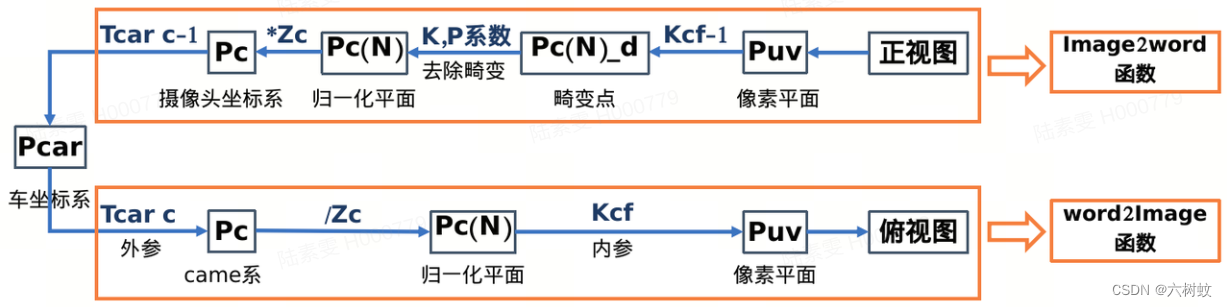
1.4.4.1 world2image
Eigen::Vector3d AVM::Word2Image(const Eigen::Vector3d& p_car,
const Eigen::Matrix3d& K, Eigen::Matrix4d T_top_b)
{
Eigen::Vector3d puv; //像素平面上坐标
Eigen::Vector4d p_car_;
p_car_ << p_car(0), p_car(1), p_car(2), 1;
std::cout << "车系下的坐标为:\n" << p_car_ << std::endl;
// std::cout << "T_top_b:\n" << T_top_b << std::endl;
Eigen::Vector4d Pc = T_top_b * p_car_; // car坐标系下的点转换为camera坐标系下的点
Eigen::Vector3d Pc_;
Pc_ << Pc(0), Pc(1), Pc(2);
std::cout << "摄像头坐标系下的坐标: \n" << Pc << std::endl;
Eigen::Vector3d pcn; //归一化
pcn = Pc_ / Pc_(2);
std::cout << "归一化平面上的坐标: \n" << pcn << std::endl;
puv = K * pcn;
std::cout << "新的像素坐标: \n" << puv << std::endl;
return puv;
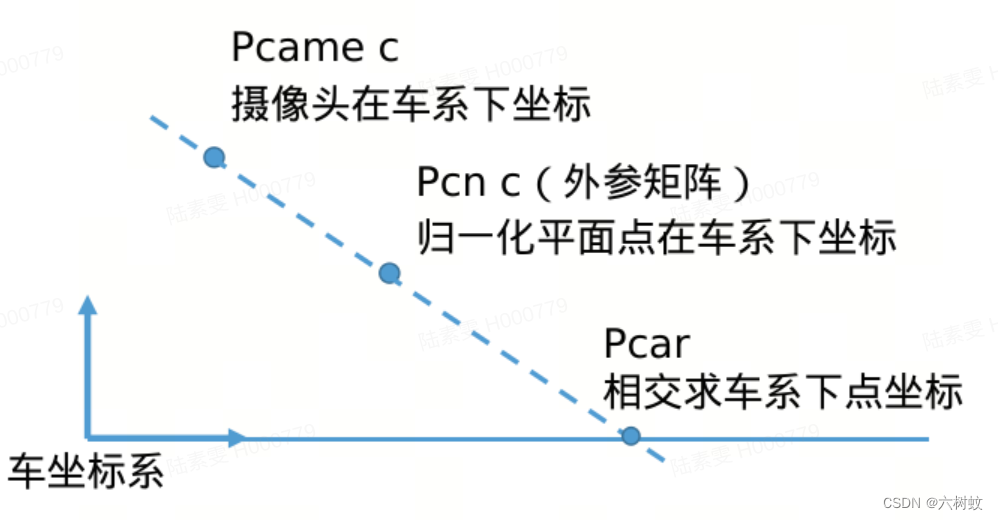
}1.4.4.2 image2world
原理:
代码:
Eigen::Vector3d AVM::Image2Word(const Eigen::Vector3d& p_uv,
const Eigen::Matrix3d& K, Eigen::Matrix4d T_b_cf)
{
// std::cout << "原始像素坐标:\n" << p_uv << std::endl;
Eigen::Vector3d Pcar;
Eigen::Vector3d Pcn_xy = K.inverse() * p_uv; //理论摄像头(归一化平面)坐标系下点的坐标
// std::cout << "摄像头坐标系下归一化平面上点的坐标:\n" << Pcn_xy<< std::endl;
Eigen::Vector4d Pcn_xy_;
Pcn_xy_ << Pcn_xy(0), Pcn_xy(1), Pcn_xy(2), 1;
Eigen::Vector4d Pcar_xy_ = T_b_cf * Pcn_xy_;
Eigen::Vector3d Pcar_xy;
Pcar_xy << Pcar_xy_(0), Pcar_xy_(1), Pcar_xy_(2);
// std::cout << "整车坐标系下点的坐标:\n" << Pcar_xy<< std::endl;
Eigen::Vector3d pp; // 平面上一点
pp << 0,0,0;
Eigen::Vector3d pn; // 平面上的法向量
pn << 0,0,1;
Eigen::Vector3d Tc;
Tc = T_b_cf.block(0,3,3,1);
// std::cout << "摄像头的位置Tc:\n" << Tc << std::endl;
AVM::CalculateLineAndPlane(Tc, Pcar_xy, pp, pn, Pcar); //计算出交点的坐标(坐标系为car坐标系)
// std::cout << "交点的坐标:\n" << Pcar.transpose() << std::endl;
return Pcar;
}1.4.4.3 image2image
前后等摄像头图像转换成鸟瞰图
1. 计算出单点的转换关系
Eigen::Vector3d AVM::UV2UV(const Eigen::Vector3d& puv, const Eigen::Matrix3d& K,
const Eigen::Matrix4d& T_b_cf, const Eigen::Matrix3d& K_top,
const Eigen::Matrix4d& T_top_b)
{
std::cout << "------原始的像素坐标: \n" << puv << std::endl;
Eigen::Vector3d pcar;
pcar = AVM::Image2Word(puv, K, T_b_cf);
Eigen::Vector3d puv_top;
puv_top = AVM::Word2Image(pcar, K_top, T_top_b);
std::cout << "------新的像素坐标: \n" << puv_top << std::endl;
return puv_top;
}2. 计算H矩阵
计算出四个点的转换关系后,用opencv库计算H矩阵:
cv::Mat transmatrixf = getPerspectiveTransform(srcPointF, dstPointF);//得到透视变换的矩阵3. 通过H矩阵对图像进行转换
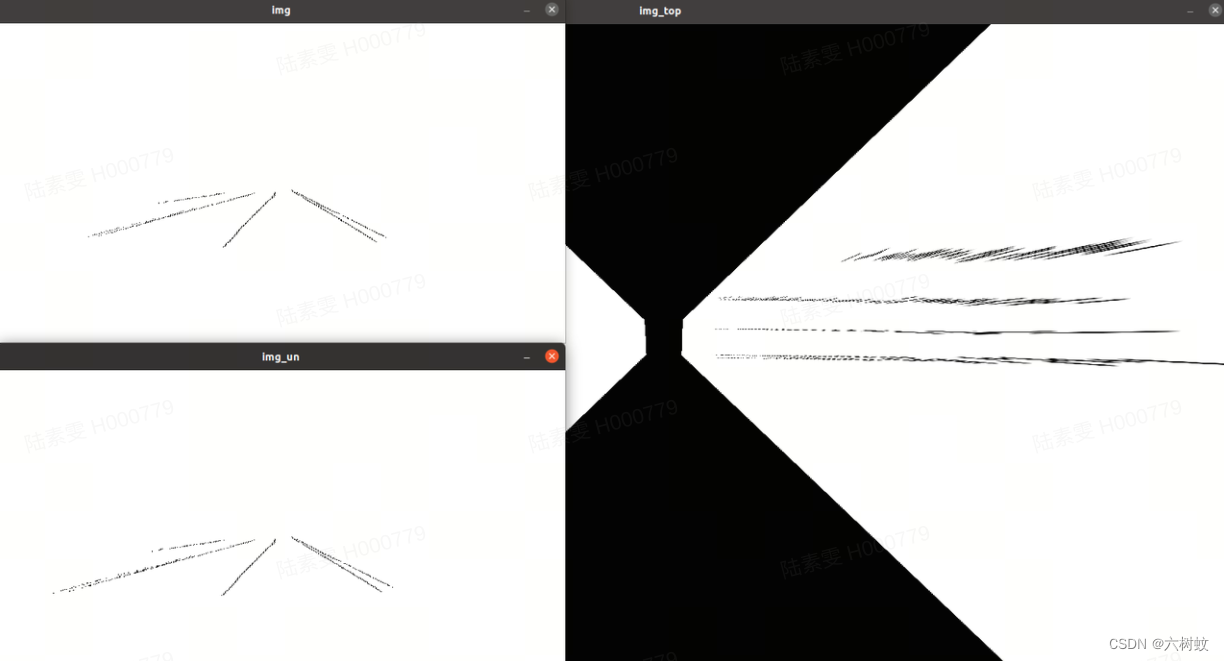
warpPerspective(src, Top_F, transmatrixf, Size(3840, 2160));1.4.4.4 透视变换效果
泊车仿真图像转换与拼接:

高速车道线转换:
二. 双目相机
单目相机无法计算深度信息
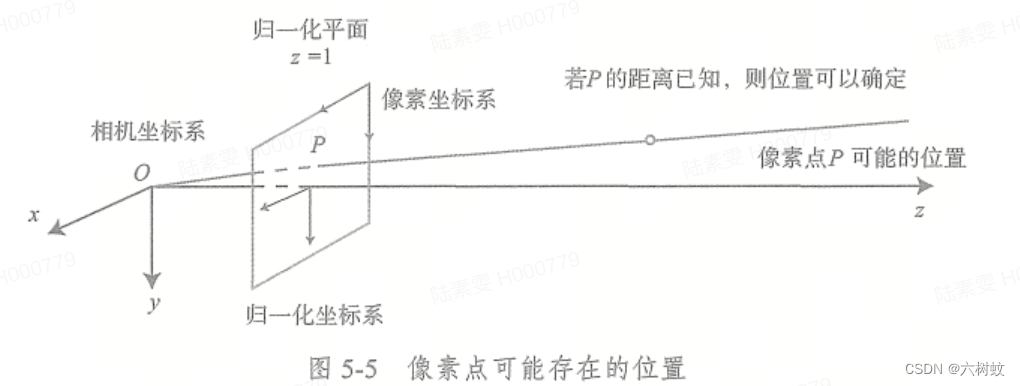
2.1 计算深度原理
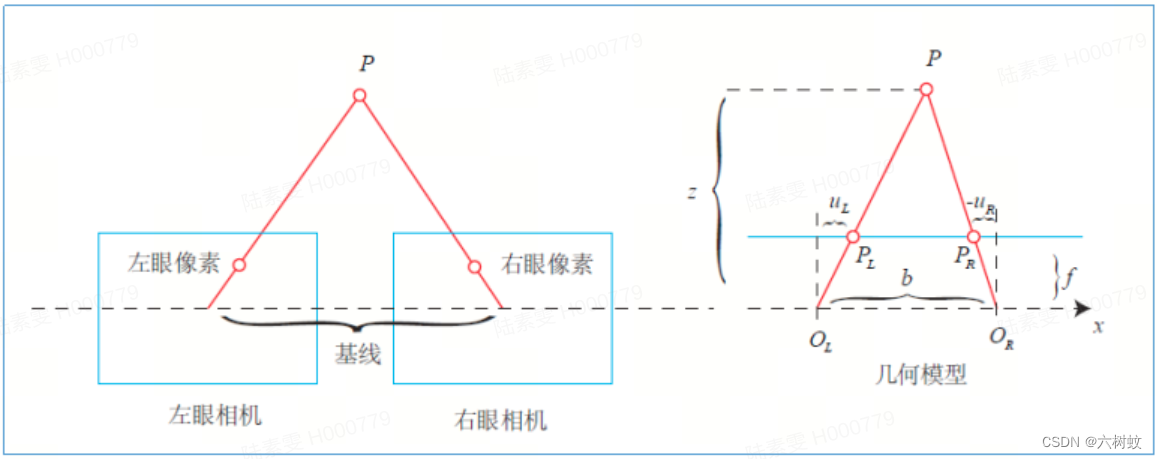
相似三角形:
所以深度为:
2.2 代码实现
int main(int argc, char **argv)
{
// 内参
double fx = 718.856, fy = 718.856, cx = 607.1928, cy = 185.2157;
// 基线
double b = 0.573;
// 读取图像
cv::Mat left = cv::imread(left_file, 0);
cv::Mat right = cv::imread(right_file, 0);
cv::Ptr<cv::StereoSGBM> sgbm = cv::StereoSGBM::create(
0, 96, 9, 8 * 9 * 9, 32 * 9 * 9, 1, 63, 10, 100, 32); // 神奇的参数
cv::Mat disparity_sgbm, disparity;
sgbm->compute(left, right, disparity_sgbm); // 神奇的sgbm算法
disparity_sgbm.convertTo(disparity, CV_32F, 1.0 / 16.0f);
// 生成点云
vector<Vector4d, Eigen::aligned_allocator<Vector4d>> pointcloud;
// 如果你的机器慢,请把后面的v++和u++改成v+=2, u+=2
for (int v = 0; v < left.rows; v++)
for (int u = 0; u < left.cols; u++) {
if (disparity.at<float>(v, u) <= 0.0 || disparity.at<float>(v, u) >= 96.0) continue;
Vector4d point(0, 0, 0, left.at<uchar>(v, u) / 255.0); // 前三维为xyz,第四维为颜色
// 根据双目模型计算 point 的位置
// 计算归一化平面上的点
double x = (u - cx) / fx;
double y = (v - cy) / fy;
// 计算深度
double depth = fx * b / (disparity.at<float>(v, u));
// 计算摄像头坐标系下的点坐标
point[0] = x * depth;
point[1] = y * depth;
point[2] = depth;
pointcloud.push_back(point);
}
cv::imshow("disparity", disparity / 96.0);
cv::waitKey(0);
// 画出点云
showPointCloud(pointcloud);
return 0;
}代码地址:
https://github.com/gaoxiang12/slambook2.git 高翔slam_demo ch5
参考资料
1.《视觉SLAM十四讲》
2.https://zhuanlan.zhihu.com/p/340751380 鱼眼相机模型
3.https://blog.csdn.net/weixin_41484240/article/details/80500903 射影变换,仿射变换,透视变换
4.https://blog.csdn.net/xinxiangwangzhi_/article/details/103367957 透视变换与射影变换















 367
367











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









