






一. 基本原理
通过两帧数据的匹配计算两帧间的变换矩阵
设上一帧点云数据集为{pi},当前点云数据集为{pi’},求解旋转矩阵R和平移向量t,使得:
二. ICP及其变种
2.1 点到点的匹配
主要有ICP,VICP,NICP算法
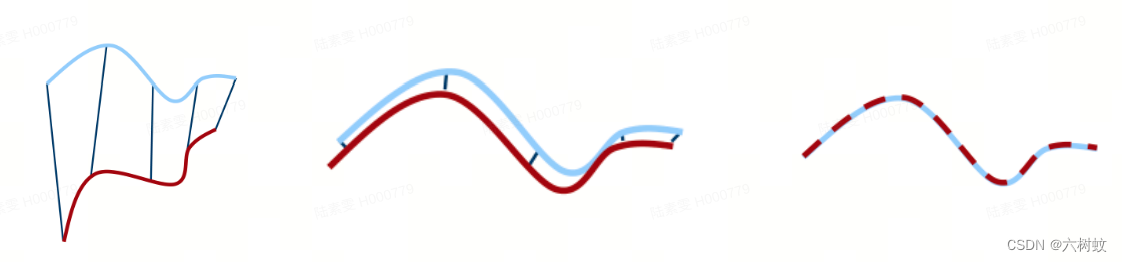
ICP:寻找最近点,通过距离最小迭代出变换矩阵
VICP:去除激光畸变后的ICP算法
NICP:距离的基础上,增加法向角度,曲率的限制,剔除错误匹配对后计算变换矩阵
2.2 点到线的匹配
主要有PL_ICP算法
背景:每次激光扫描时,未必会扫描到同一个点,匹配点更有可能在线上
方法:寻找最近的两个点,计算当前点离最近两点形成的直线距离,计算变换矩阵

2.3 点到面的匹配
主要有IMLS_ICP算法
背景:每次激光扫描时,未必会扫描到同一个点,也未必会扫描到之前帧激光点构建的子图所在的线段上,但大概率会扫描到之前帧激光点所在的平面上
方法:通过上一帧激光数据重建曲面,找当前激光点在曲面上的投影,组成匹配对,再通过ICP方式找到转换矩阵

2.4 面到面的匹配
主要有GICP算法
三. ICP算法
3.1 ICP的位姿解为
公式中变量含义:
pi和pi′为两帧点云数据
p,p'为两帧数据的几何中心(均值)
qi和qi′为点云去中心化后数据
V,Ut为qi∗qi′t进行SVD分解得到
R,t为两帧的变换矩阵
3.2 ICP算法的推导过程:
1. 计算点云的几何中心(均值)
2. 去中心化后
3. 求最小二乘
原最小二乘:
转换为:
求min,相当于求max(
)
矩阵乘法及 trace 的定义可得:
根据 trace 的性质:
即求:
令,即求:
据定理,A为正定对称矩阵,对于任意的正交矩阵都有:
H并非正定对称矩阵,所以对H进行SVD分解:
其中U和V为正交矩阵,Λ为对角矩阵
令,X为正交矩阵,X*H为正定对称矩阵
所以任意的正交矩阵B,都有:
所以:
3.3 PCL库中的ICP代码应用(c++)
应用:
// 需要安装pcl库
#include <pcl/point_types.h>
#include <pcl/registration/icp.h>
// 处理出上一帧和当前帧的点云数据
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_source(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_target(new pcl::PointCloud<pcl::PointXYZ>);
pcl::IterativeClosestPoint<pcl::PointXYZ, pcl::PointXYZ> icp;
icp.setInputSource(cloud_source);
icp.setInputTarget(cloud_target);
pcl::PointCloud<pcl::PointXYZ> Final;
// 点云配准
// 1.KdTree查找对应点对、剔除错误对应点
// 2.计算R和T的变换矩阵
// 3.迭代
icp.align(Final);
std::cout << "transformation: " << std::endl << icp.getFinalTransformation() << std::endl;PCL库中的ICP核心源码
/// ICP中的核心代码
template <typename PointSource, typename PointTarget, typename Scalar>
void pcl::registration::TransformationEstimationSVD<PointSource, PointTarget, Scalar>::getTransformationFromCorrelation (
const Eigen::Matrix<Scalar, Eigen::Dynamic, Eigen::Dynamic> &cloud_src_demean, // 移除平均值后的点云
const Eigen::Matrix<Scalar, 4, 1> ¢roid_src,
const Eigen::Matrix<Scalar, Eigen::Dynamic, Eigen::Dynamic> &cloud_tgt_demean,
const Eigen::Matrix<Scalar, 4, 1> ¢roid_tgt,
Matrix4 &transformation_matrix) const
{
transformation_matrix.setIdentity ();
// Assemble the correlation matrix H = source * target'
Eigen::Matrix<Scalar, 3, 3> H = (cloud_src_demean * cloud_tgt_demean.transpose ()).topLeftCorner (3, 3);
// Compute the Singular Value Decomposition
Eigen::JacobiSVD<Eigen::Matrix<Scalar, 3, 3> > svd (H, Eigen::ComputeFullU | Eigen::ComputeFullV);
Eigen::Matrix<Scalar, 3, 3> u = svd.matrixU ();
Eigen::Matrix<Scalar, 3, 3> v = svd.matrixV ();
// R 最优证明,提取关键点——正交阵可能为旋转阵或者反射阵,区分行列式 1 或 -1,见下述
// R 为正交标准阵,故旋转阵行列式应为 1,三维同适用(正交阵相乘保持正交),故判断 det(R),证明前提可用,以保证计算结果正确
// 理论支撑 1,两个矩阵乘积的行列式与矩阵行列式的乘积相等
// 理论支撑 2,矩阵的行列式矩阵转置的行列式相等
// Compute R = V * U'
if (u.determinant () * v.determinant () < 0)
{
// H = UΣV' 中奇异值最小为 0,即共面,故改变 v 第三维而不改变 H = UΣV' 结果,但由反射转换到 R 旋转的假设
for (int x = 0; x < 3; ++x)
v (x, 2) *= -1;
// 理论上还有一种情况,无奇异值为 0,即非共面,SVD 方法失效,需要用其他如 RANSAC-like 方法对抗离群数据过多
}
// R 最优证明,即多项式(内积非负)负值项最大化。内积转换为迹,用到 Schwarz 不等式,SVD 分解,定义最优 R,得证,无需再旋转
Eigen::Matrix<Scalar, 3, 3> R = v * u.transpose ();
// T 计算,旋转后源中心点 - 目标中心点,取其负值,即源点云转换到目标点云
// Return the correct transformation
transformation_matrix.topLeftCorner (3, 3) = R;
const Eigen::Matrix<Scalar, 3, 1> Rc (R * centroid_src.head (3));
transformation_matrix.block (0, 3, 3, 1) = centroid_tgt.head (3) - Rc; // 输出的转换矩阵
}3.4 ICP代码实现(python)
二维可直接用该方法计算, 避免svd分解等矩阵运算, 具体理论推导见参考资料
import numpy as np
import math
import matplotlib.pyplot as plt
# 求出两个点之间的向量弧度,向量方向由点1指向点2
def GetTheAngleOfTwoPoints(x1,y1,x2,y2):
return math.atan2(y2-y1,x2-x1)
# 求出两个点的距离
def GetDistOfTwoPoints(x1,y1,x2,y2):
return math.sqrt(math.pow(x2-x1,2) + math.pow(y2-y1,2))
# 在pt_set点集中找到距(p_x,p_y)最近点的id
def GetClosestID(p_x,p_y,pt_set):
id = 0
min = 10000000
for i in range(pt_set.shape[1]):
dist = GetDistOfTwoPoints(p_x,p_y,pt_set[0][i],pt_set[1][i])
if dist < min:
id = i
min = dist
return id
# 求两个点集之间的平均点距
def DistOfTwoSet(set1,set2):
loss = 0;
for i in range(set1.shape[1]):
id = GetClosestID(set1[0][i],set1[1][i],set2)
dist = GetDistOfTwoPoints(set1[0][i],set1[1][i],set2[0][id],set2[1][id])
loss = loss + dist
return loss/set1.shape[1]
def ICP(sourcePoints,targetPoints):
A = targetPoints # A是标准点云
B = sourcePoints # B是源点云
iteration_times = 0 # 迭代次数为0
dist_now = 1 # A,B两点集之间初始化距离
dist_improve = 1 # A,B两点集之间初始化距离提升
dist_before = DistOfTwoSet(A,B) # A,B两点集之间距离
while iteration_times < 10 and dist_improve > 0.001: # 迭代次数小于10 并且 距离提升大于0.001时,继续迭代
x_mean_target = A[0].mean() # 获得A点云的x坐标轴均值。
y_mean_target = A[1].mean() # 获得A点云的y坐标轴均值。
x_mean_source = B[0].mean() # 获得B点云的x坐标轴均值。
y_mean_source = B[1].mean() # 获得B点云的y坐标轴均值。
A_ = A - np.array([[x_mean_target],[y_mean_target]]) # 获得A点云的均一化后点云A_
B_ = B - np.array([[x_mean_target],[y_mean_target]]) # 获得B点云的均一化后点云B_
w_up = 0 # w_up,表示角度公式中的分母
w_down = 0 # w_up,表示角度公式中的分子
for i in range(A_.shape[1]): # 对点云中每个点进行循环
j = GetClosestID(A_[0][i],A_[1][i],B) # 在B点云中找到距(A_[0][i],A_[1][i])最近点的id
w_up_i = A_[0][i]*B_[1][j] - A_[1][i]*B_[0][j] # 获得求和公式,分母的一项
w_down_i = A_[0][i]*B_[0][j] + A_[1][i]*B_[1][j] # 获得求和公式,分子的一项
w_up = w_up + w_up_i
w_down = w_down + w_down_i
TheRadian = math.atan2(w_up,w_down) # 分母与分子之间的角度
x = x_mean_target - math.cos(TheRadian)*x_mean_source - math.sin(TheRadian)*y_mean_source # x即为x轴偏移量
y = x_mean_target + math.cos(TheRadian)*x_mean_source - math.sin(TheRadian)*y_mean_source # y即为y轴偏移量
R = np.array([[math.cos(TheRadian),math.sin(TheRadian)],[-math.sin(TheRadian),math.cos(TheRadian)]]) # 由θ得到旋转矩阵。
B = np.matmul(R,B) + np.array([x],[y])
iteration_times = iteration_times + 1 # 迭代次数+1
dist_now = DistOfTwoSet(A,B) # 变换后两个点云之间的距离
dist_improve = dist_before - dist_now # 这一次迭代,两个点云之间的距离提升。
print("迭代第"+str(iteration_times)+"次,损失是"+str(dist_now)+",提升了"+str(dist_improve)) # 打印迭代次数、损失距离、损失提升
dist_before = dist_now # 将"现在距离"赋值给"以前距离",开始下一轮迭代循环。
return B参考资料:
视觉slam十四讲
least-squares fitting of two 3-D point sets -- 论文
[Python] 二维 ICP 配准算法 ( 含有笔记、代码、注释 ) - 知乎
https://blog.csdn.net/qq_56780627/article/details/122163081 -- SVD分解















 1177
1177











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









