










加计数器指令CTU、减计数器指令CTD、加/减计数器指令CTUD;
目录
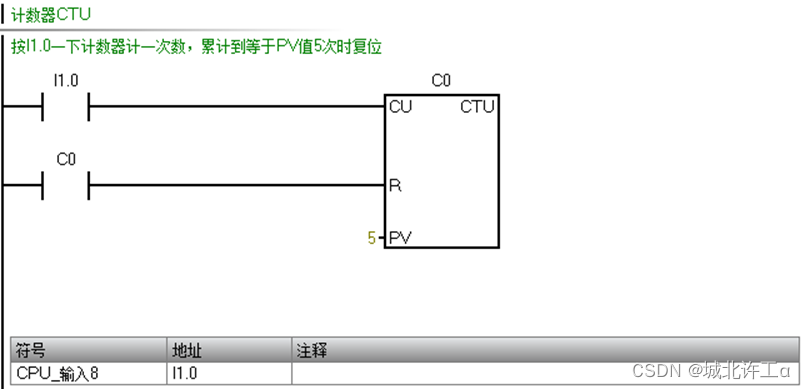
1.加计数器指令CTU
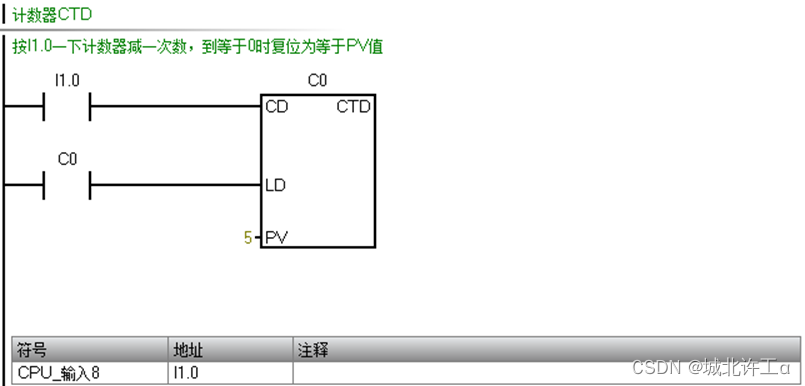
2.减计数器指令CTD
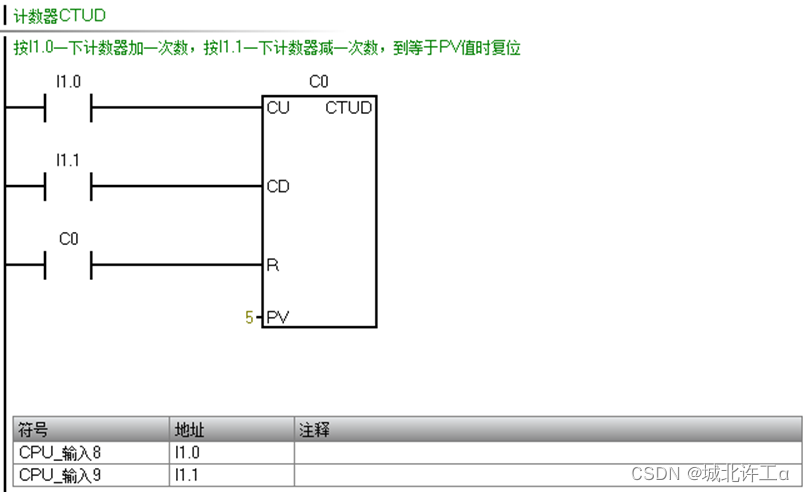
3.加/减计数器指令CTUD
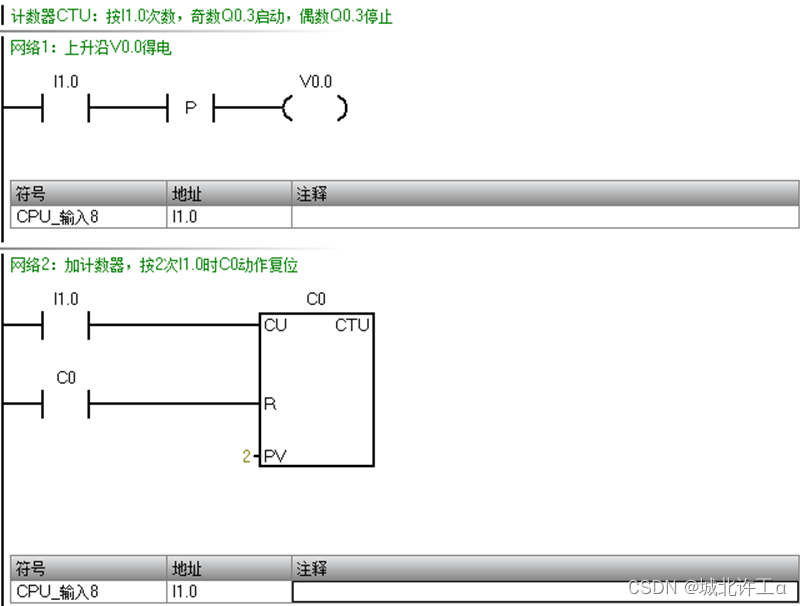
4.场景1:按奇数次启动,偶数次停止
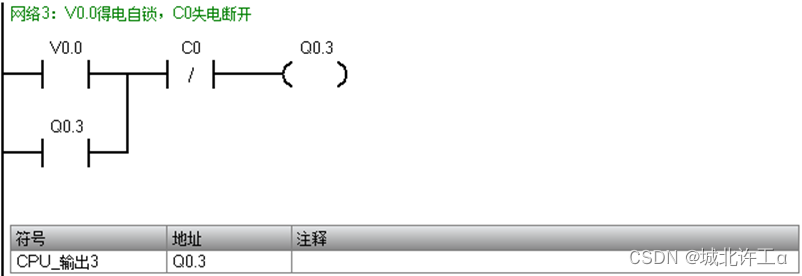
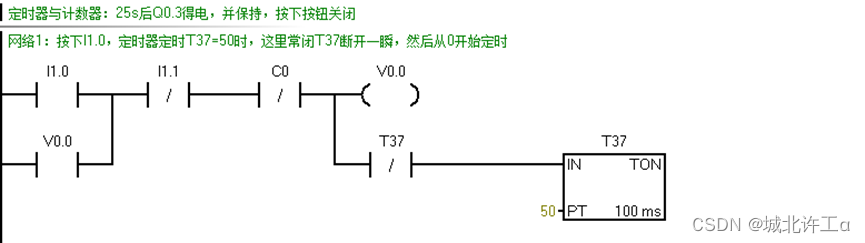
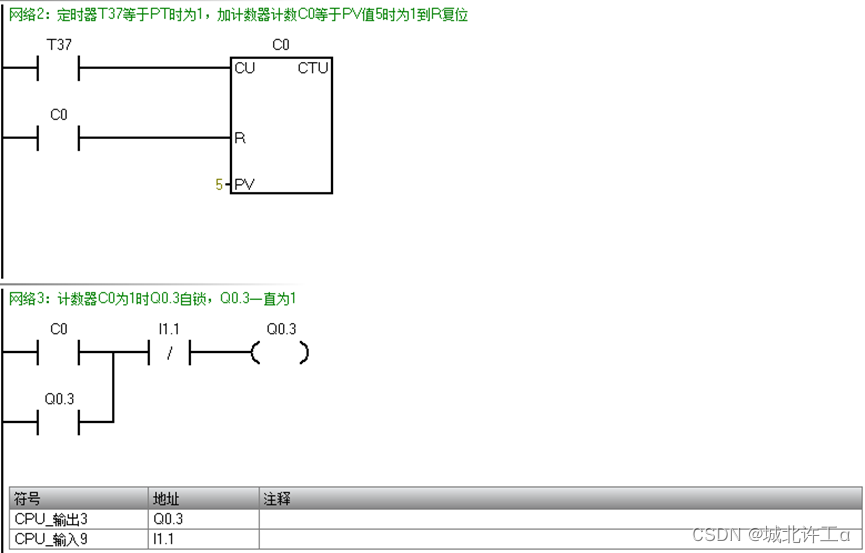
5.场景2:延时得电保持
加计数器指令CTU、减计数器指令CTD、加/减计数器指令CTUD;
目录
 8723
5323
3万+
8723
5323
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























