







 本文详细介绍了机器人底盘的基础配置,包括无线网络连接、Xshell使用、nmcli命令、键盘遥控、虚拟机和Ubuntu的使用、ROS分布式通讯设置、时间同步、免密登陆以及安卓设备的终端和ROS控制应用。还涵盖了如何通过NoMachine实现远程桌面访问机器人的图形界面。
本文详细介绍了机器人底盘的基础配置,包括无线网络连接、Xshell使用、nmcli命令、键盘遥控、虚拟机和Ubuntu的使用、ROS分布式通讯设置、时间同步、免密登陆以及安卓设备的终端和ROS控制应用。还涵盖了如何通过NoMachine实现远程桌面访问机器人的图形界面。
4.1底盘基础功能
4.1.3nmcli命令配置机器人无线网 Xshell中进行(Xshell此软件安装包在3.windows实用软件当中下载)注:如果没有办法使用直接百度上搜索Xshell官网下载最新版本
配置无线网络视频教程首先准备一台路由器和网线 如下图所示连接小车(注:路由器可以没有互联网)
连上小车后需等待2-3分钟小车系统启动后才能查找到小车IP地址(如果长时间没看到IP地址可以刷新一下页面)
以TP-LINK路由器为准打开路由器管理后台查看小车的IP地址(每个路由器管理后台界面不同操作也有所不同)

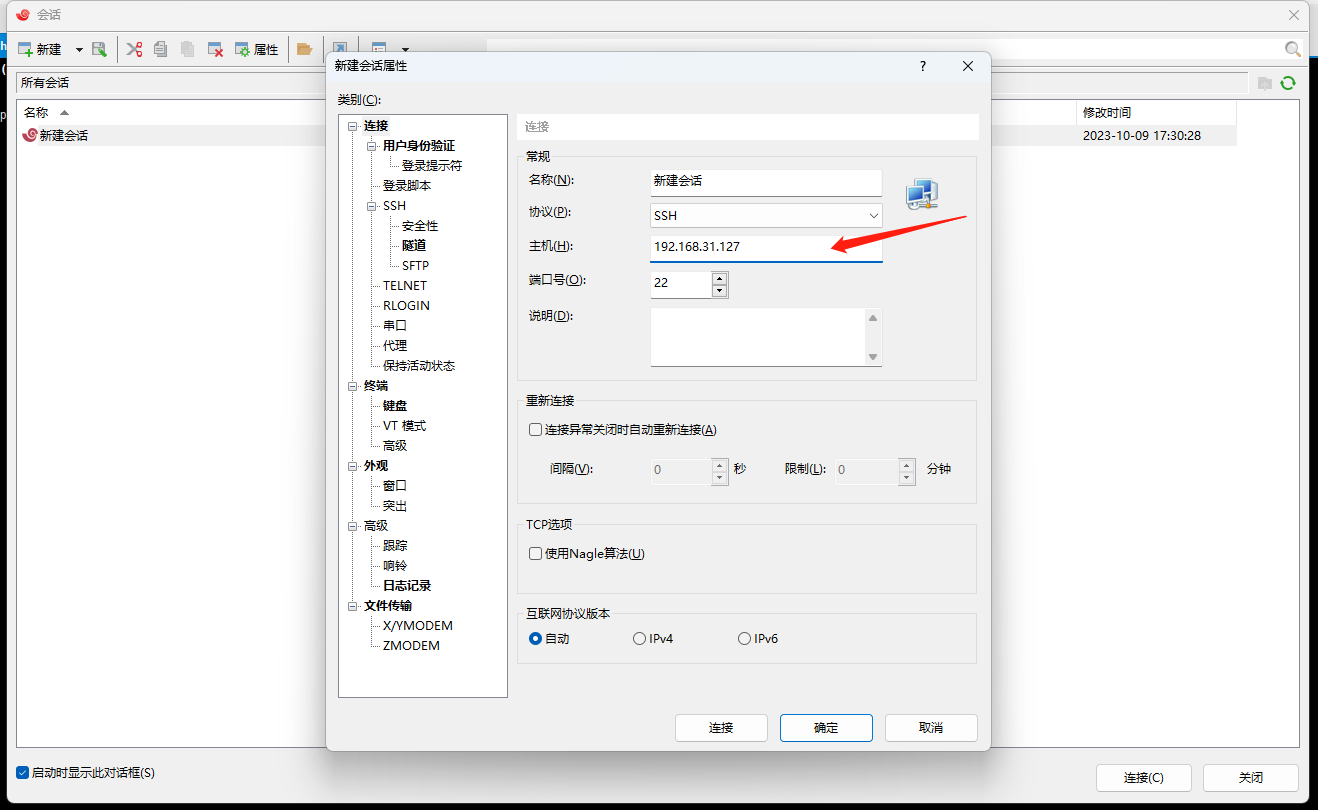
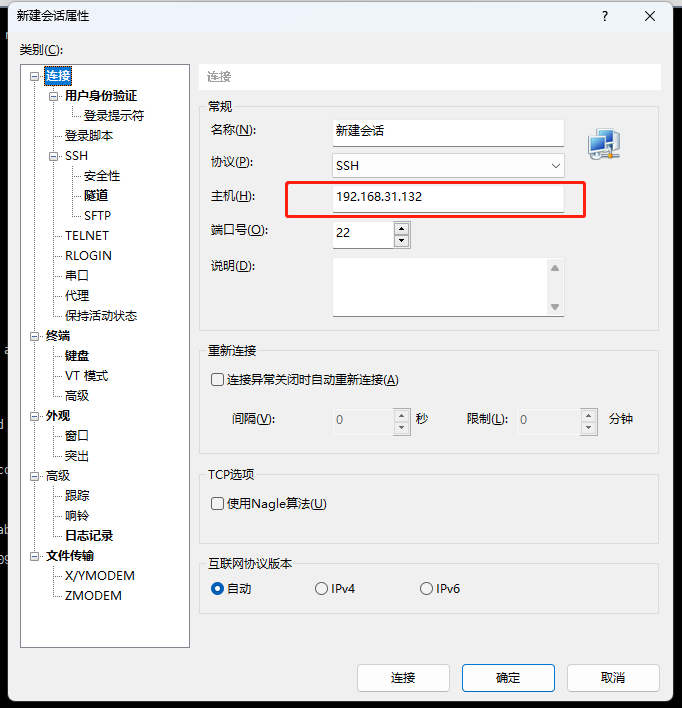
打开Xshell软件 使用小车IP进行登录
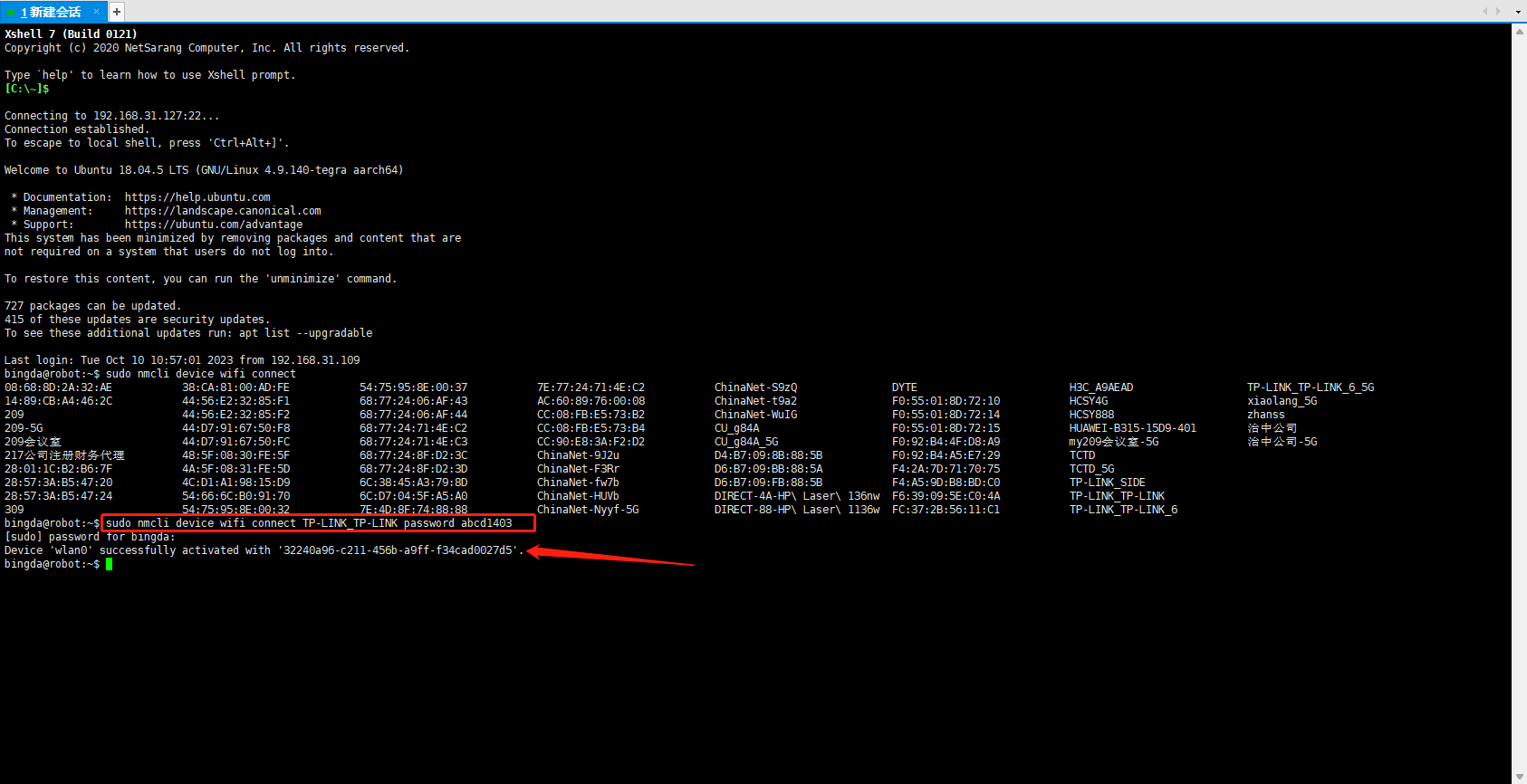
接下来通过nmcli工具配置wifi连接,其中your_ap是需要连接的wifi热点名,your_password是热点密码
Tips:在命令中输入connect后可以使用TAB自动补全工具列出周围的热点
sudo nmcli device wifi connect your_ap password your_password输入完成后执行,提示”Device 'wlan0' successfully activated with 'd6a46eb9-c0e3-4c60-9f2b-d6f7ee32de02'.“即为连接成功。
查看小车无线IP(查看Wlan0的ip地址)
ifconfig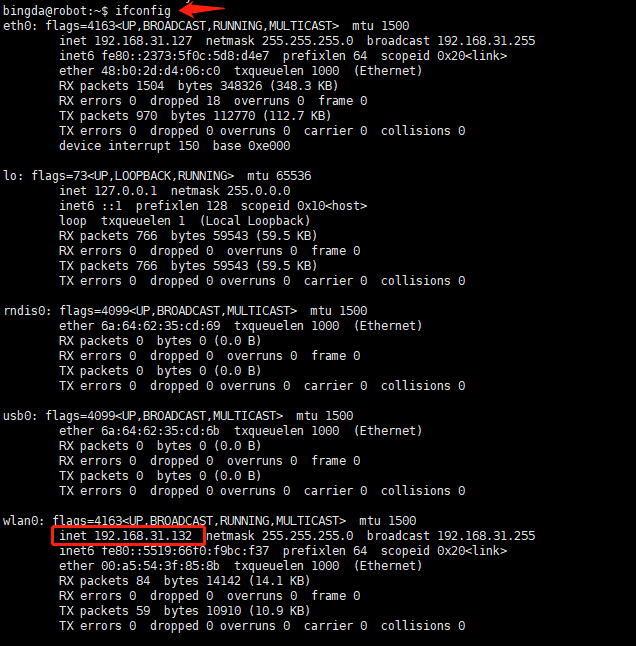
接着拔掉网线 使用小车无线IP登录Xshell(也可用于登录nomachine)
4.1.4机器人底盘启动和键盘遥控
打开xshell登陆小车,需注意如果机器人在WiFi模式下,必须确保PC和机器人连接在同一个路由器上。如果机器人在AP模式下,必须确保PC连接在机器人的热点上。
通过launch文件启动底盘控制:
roslaunch base_control base_control.launch
正确运行后底盘蜂鸣器会发出一声长响,终端会输出底盘的基本信息

新打开一个终端登陆到机器人,输入rostopic list检查话题列表可以看到目前ros中有如下话题,这里依次介绍一下这些话题都有什么作用。
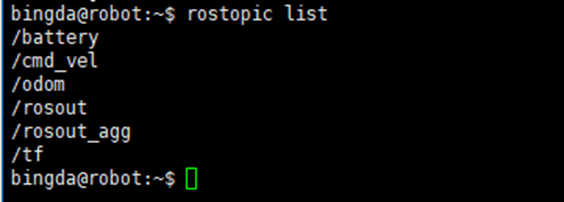
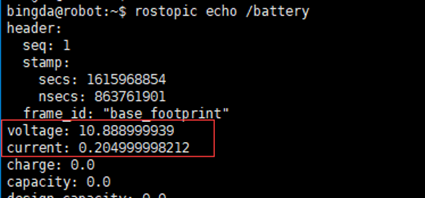
battery这个话题输出的内容有电池的电压和电流两个重要信息。
/cmd_vel这个话题目前没有发布者,而订阅者是底盘
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 100
100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









