







External Player - 哔哩哔哩嵌入式外链播放器
AprilTag简介
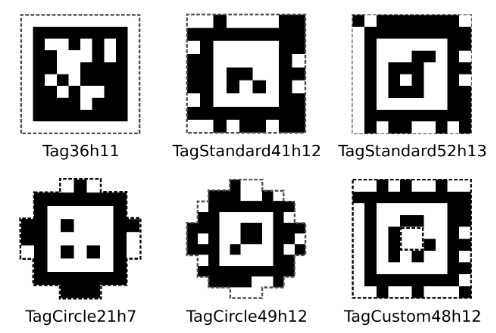
AprilTag类似于二维码QR codes(Quick Response Code;全称为快速响应矩阵图码)
AprilTag可用于多种用途,包括相机标定、目标大小估计单目距离测量等。
二维码可以直接用打印机打印在纸张上,不需要特殊材料。
而AprilTag检测程序可以计算相对于相机的三维位置和二维码所承载的ID信息。
参考链接:
使用前准备-功能包
sudo apt install ros-$ROS_DISTRO-apriltag-ros为了方便使用,我创建了一个新的功能包用于存放相机启动、标定文件已经apriltag_ros所需要的配置文件
cd ~/catkin_ws/srcgit clone https://gitee.com/bingda-robot/apriltag_dete 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 274
274

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









