






由 ROS 主机(小车)发出 WiFi
1.小车端 WiFi 切换、新建热点配置
详细见百度网盘机器人资料-3.ROS开发手册-1.机器人功能使用与解析,按步骤进行操作即可正确配置好并连接上热点。
2.小车端 IP 地址
由小车发出热点时,我们就将小车作为 ROS 主机,首先查看主机 IP 地址,
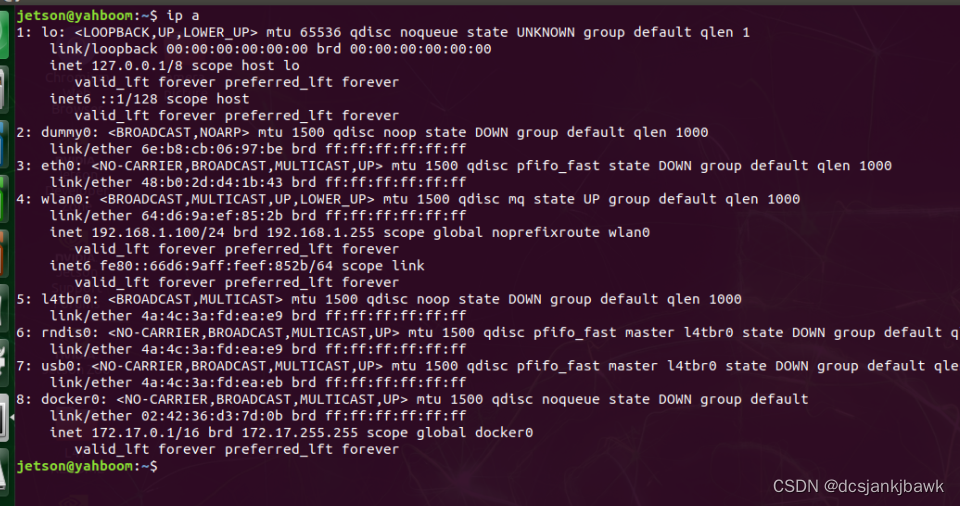
可以查得主机的 IP 地址是 192.168.1.100。
若小车更改固定 IP 后,需要重启热点(重新连接热点)或重启 ROS 主控才会
生效。
3.小车.bashrc 文件配置
在.bashrc 文件中,我们需要对主机及从机的 IP 地址进行配置,ROS_MASTER_URI 设置为哪个设备的 IP 地址,就认为哪台设备是主机,只有主机可以启动 roscore,而 ROS_HOSTNAME 应该设置为当前设备(小车)的 IP 地址,否则无法与其它设备进行 ROS 通信。.
使用gedit的方式打开.bashrc文件
gedit .bashrc可以看到.bashrc的文件配置如下
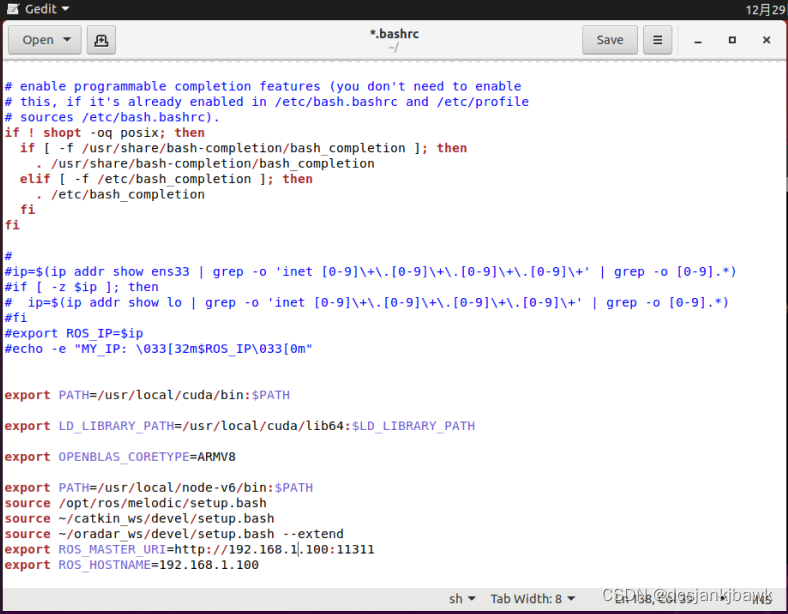
因为将小车作为 ROS 主机,因此这里 ROS_MASTER_URI 与ROS_HOSTNAME 更改为(若没有这条语句的话直接整句加上)小车固定的 IP 地址 192.168.1.100。配置完以后source刷新一下。
source .bashrc4.虚拟机端ip地址
点击虚拟机 Ubuntu 系统界面右上角的连接设置图标,选择有线连接,点击有线设置。
新建一个网络配置 命名为Static IP,里面配置如下

其中从机的IP地址设置需要参考主机端IP设置,需要在同一网段下,否则无法通信。
5.虚拟机设置
点击编辑-虚拟网络编辑器,点击更改设置,启用vmnet0,并选择桥接模式,桥接到本电脑的网卡中。

注意:选择的虚拟网卡只能是vmnet0,此虚拟网卡官方定义为桥接网络,vmnet0和vmnet8选择桥接模式后在后续步骤会造成无法通信。
保存设置后关闭,点击虚拟机-设置-网络适配器-桥接模式
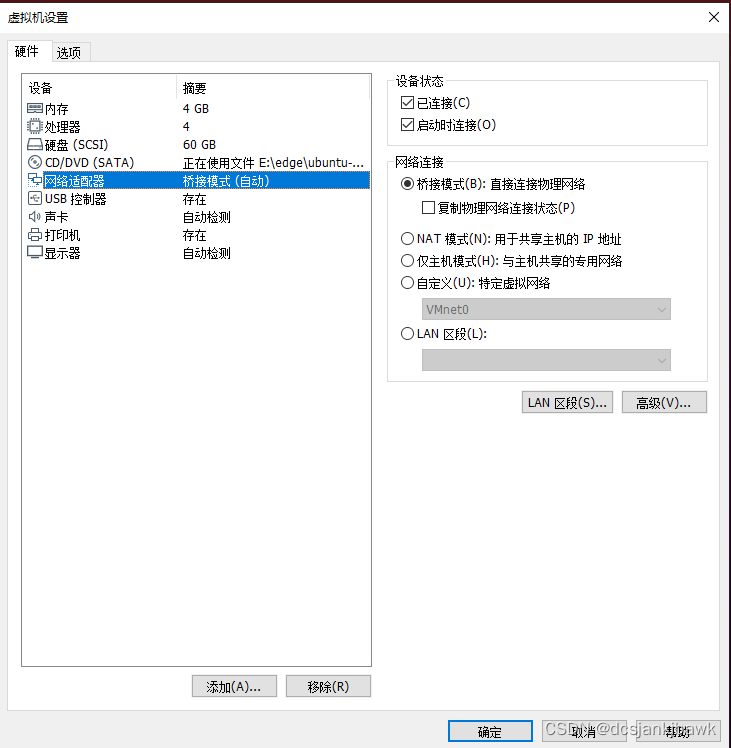
此时桥接网络已配置完成。
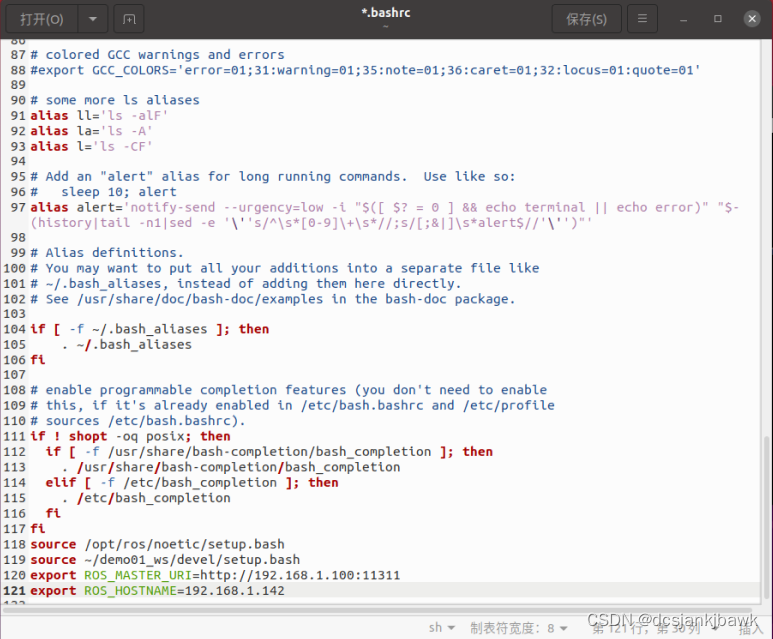
6.虚拟机.bashrc文件配置
前面我们已经查看到小车热点 IP 地址为 192.168.1.100,同时虚拟机静态 IP 地址默认固定为 192.168.1.142,ROS_MASTER_URI 为主机 IP 地址,因此设置为 192.168.1.100,而 ROS_HOSTNAME 为当前设备的 IP 地址,即虚拟机 IP地址 192.168.1.142,
7.进行ssh远程登录
输入命令即可远程登录小车
ssh -Y jetson@192.168.1.100若要出现图形化界面需要在ssh后输入-Y,否则则不需要
同时ros核心只能在主机端启动,从机端无法启动















 1345
1345











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









