







 本文介绍了KUKA机器人中的三种奇点位置:顶置奇点(轴A1位置不确定)、延伸位置奇点(边缘位置可能导致大角度变化)和手轴奇点(轴A4/A6位置不确定)。机器人控制系统通过系统变量处理这些奇点,确保运动路径的准确性。
本文介绍了KUKA机器人中的三种奇点位置:顶置奇点(轴A1位置不确定)、延伸位置奇点(边缘位置可能导致大角度变化)和手轴奇点(轴A4/A6位置不确定)。机器人控制系统通过系统变量处理这些奇点,确保运动路径的准确性。
有着6级自由度的KUKA机器人具有3种不同的奇点位置
1.顶置奇点 2.延伸位置奇点 3.手轴奇点

即便在给定状态和步骤顺序的情况下,也无法通过逆向变换(将笛卡尔坐标转换成极坐标值)得出唯一数值时,即可认为是一个奇点位置。这种情况下,或者当最小的笛卡尔变化也能导致非常大的轴角度变化时,即为奇点位置。
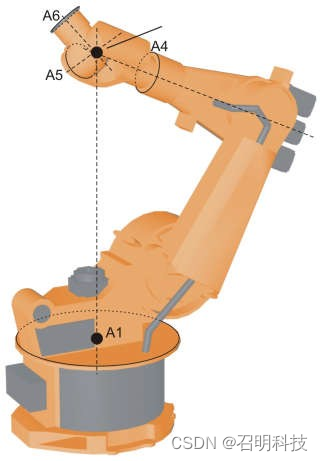
顶置奇点:
对于顶置奇点来说,腕点(即轴A5的中点)垂直于机器人的轴A1。
轴A1的位置不能通过逆向变换明确确定,且因此可以赋以任意值。
若有一条PTP运动语句的目标点位于该顶置奇点中, 则机器人控制系统可通
过系统变量$SING UL_POS[1] 作出以下反应:
0:轴A1的角度被确定为0°(默认设定)
1:轴A1的角度从起始点一直到目标点保持不变。
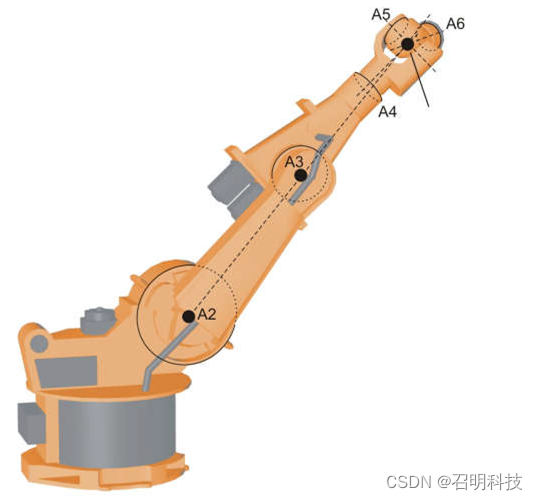
延伸位置奇点:
对于延伸位置奇点来说,腕点(即轴A5的中点)垂直于机器人的轴A2和A3。
机器人处于其工作范围的边缘,通过逆向变换将得出唯一的轴角度,但较小的笛卡尔速度变化将导致轴A2和A3的轴速较大。
若有一条PTP (点至点)运动语句的目标点位于该延伸位置奇点上,则机器人控制系统可通过系统变量$SING UL_POS[2] 作出以下反应:
0:轴A2的角度被确定为0°(默认设定)
1:轴A2的角度从起始点一直到目标点保持不变。
手轴奇点:(现场调试最为常见)
对于手轴奇点来说,轴A4和A6彼此平行,并且轴A5处于±0.01812°的范围内。通过逆向变换无法明确确定两轴的位置。轴A4和A6的位置可以有任意多的可能性,但其轴角度总和均相同。若有一条PTP(点至点) 运动语句的目标点位于该手轴奇点上,则机器人控制系统可通过系统变量$SING UL_POS[3] 作出以下反应:
0:轴A4的角度被确定为0°。(默认设定)
1:轴A4的角度从起始点一直到目标点保持不变。


















 1971
1971

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











