






最简单条件生成对抗网络(CGAN)学习:通俗讲解
欢迎点赞和收藏,后续会继续分享文章,记得关注我呀
本文为365天深度学习训练营中的博客学习总结
原作者:k同学呀
文章来源:K同学的学习圈
模型提出介绍
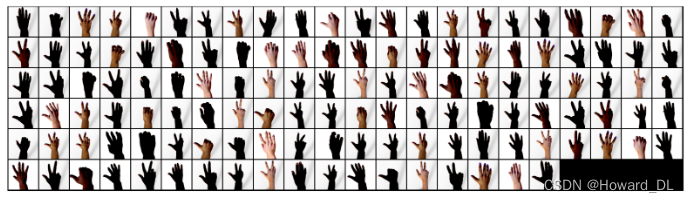
我们都知道GAN可以生成很逼真的人脸,它是随机生成人脸呀,如果我指定要生成一张女生或男生的脸怎么办,如果我想指定生成一张迪丽热巴的脸怎么办,是不是它就不行了。再比如它可以生成手势图,比如剪刀手,里面有阴影的,有真人的,那如果我们指定要生成阴影的,它也做不到。因为最初的GAN只是以假乱真,还没有监督信号,所以做不到有条件的生成。
模型升级方法
既然GAN没有监督信号,那我们直接加入就好了。
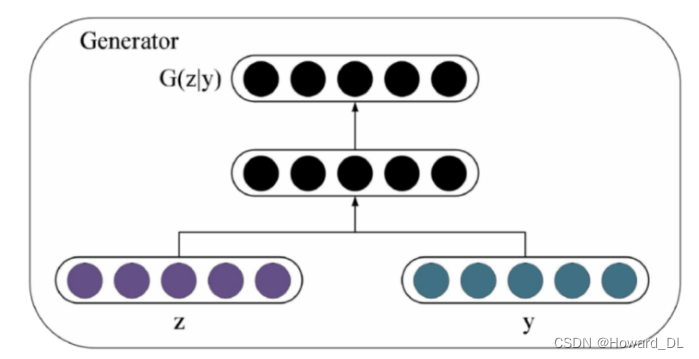
生成网络: G(x)最初只有输入一个噪声。那我们再加入一个监督信号并编码就好了。以黑白手势为例。监督信号为阴影手势,还是真人手势。然后通过一个编码器进行编码,再把输出结果与噪声同时输入就好了。
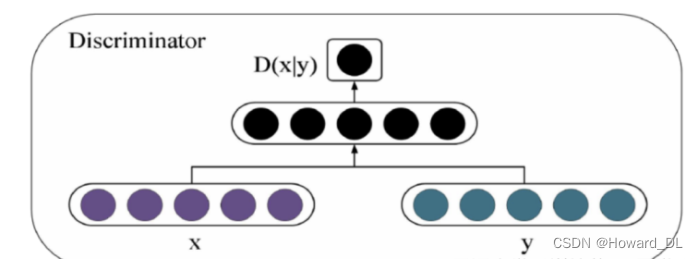
同理,判别器也只需要加一个是对什么条件下的输出进行判别即可。
条件映射方法
上面提到了把条件进行编码输入就可以。那我们怎么编码呢?这是核心问题,其实你仔细想一想是有现成方法的。我们只需要把word3vector 中的embeddings层拿过来就能用。比如一个嵌入层加一个全连接。
talking is cheap, show me code .下面我们就一起学习和复现代码。🙌
代码
导包
import torch
import numpy as np
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.autograd import Variable
from torchvision.utils import save_image
from torchvision.utils import make_grid
from torch.utils.tensorboard import SummaryWriter
from torchsummary import summary
import matplotlib.pyplot as plt
设置超参
dataroot = "./data/GAN/" # 数据路径
batch_size = 128 # 训练过程中的批次大小
image_size = 128 # 图像的尺寸(宽度和高度)
image_shape = (3, 128, 128)
image_dim = int(np.prod(image_shape))
latent_dim = 100
n_classes = 3 # 条件标签的总数
embedding_dim = 100
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
数据集后面上传,可以在我的主页免费下载
导入数据
# 创建数据集
train_dataset = datasets.ImageFolder(root=dataroot,
transform=transforms.Compose([
transforms.Resize(image_size), # 调整图像大小
transforms.ToTensor(), # 将图像转换为张量
transforms.Normalize((0.5, 0.5, 0.5), # 标准化图像张量
(0.5, 0.5, 0.5)),
]))
# 创建数据加载器
train_loader = torch.utils.data.DataLoader(train_dataset,
batch_size=batch_size, # 批量大小
shuffle=True, # 是否打乱数据集
num_workers=6 # 使用多个线程加载数据的工作进程数
)
可视化
def show_images(images):
fig, ax = plt.subplots(figsize=(20, 20))
ax.set_xticks([]); ax.set_yticks([])
ax.imshow(make_grid(images.detach(), nrow=22).permute(1, 2, 0))
def show_batch(dl):
for images, _ in dl:
show_images(images)
break
show_batch(train_loader)
定义模型
参数初始化函数
# 自定义权重初始化函数,用于初始化生成器和判别器的权重
def weights_init(m):
# 获取当前层的类名
classname = m.__class__.__name__
# 如果当前层是卷积层(类名中包含 'Conv' )
if classname.find('Conv') != -1:
# 使用正态分布随机初始化权重,均值为0,标准差为0.02
torch.nn.init.normal_(m.weight, 0.0, 0.02)
# 如果当前层是批归一化层(类名中包含 'BatchNorm' )
elif classname.find('BatchNorm') != -1:
# 使用正态分布随机初始化权重,均值为1,标准差为0.02
torch.nn.init.normal_(m.weight, 1.0, 0.02)
# 将偏置项初始化为全零
torch.nn.init.zeros_(m.bias)
定义生成器
class Generator(nn.Module):
def __init__(self):
super(Generator, self).__init__()
# 定义条件标签的生成器部分,用于将标签映射到嵌入空间中
# n_classes:条件标签的总数
# embedding_dim:嵌入空间的维度
self.label_conditioned_generator = nn.Sequential(
nn.Embedding(n_classes, embedding_dim), # 使用Embedding层将条件标签映射为稠密向量
nn.Linear(embedding_dim, 16) # 使用线性层将稠密向量转换为更高维度
)
# 定义潜在向量的生成器部分,用于将噪声向量映射到图像空间中
# latent_dim:潜在向量的维度
self.latent = nn.Sequential(
nn.Linear(latent_dim, 4*4*512), # 使用线性层将潜在向量转换为更高维度
nn.LeakyReLU(0.2, inplace=True) # 使用LeakyReLU激活函数进行非线性映射
)
# 定义生成器的主要结构,将条件标签和潜在向量合并成生成的图像
self.model = nn.Sequential(
# 反卷积层1:将合并后的向量映射为64x8x8的特征图
nn.ConvTranspose2d(513, 64*8, 4, 2, 1, bias=False),
nn.BatchNorm2d(64*8, momentum=0.1, eps=0.8), # 批标准化
nn.ReLU(True), # ReLU激活函数
# 反卷积层2:将64x8x8的特征图映射为64x4x4的特征图
nn.ConvTranspose2d(64*8, 64*4, 4, 2, 1, bias=False),
nn.BatchNorm2d(64*4, momentum=0.1, eps=0.8),
nn.ReLU(True),
# 反卷积层3:将64x4x4的特征图映射为64x2x2的特征图
nn.ConvTranspose2d(64*4, 64*2, 4, 2, 1, bias=False),
nn.BatchNorm2d(64*2, momentum=0.1, eps=0.8),
nn.ReLU(True),
# 反卷积层4:将64x2x2的特征图映射为64x1x1的特征图
nn.ConvTranspose2d(64*2, 64*1, 4, 2, 1, bias=False),
nn.BatchNorm2d(64*1, momentum=0.1, eps=0.8),
nn.ReLU(True),
# 反卷积层5:将64x1x1的特征图映射为3x64x64的RGB图像
nn.ConvTranspose2d(64*1, 3, 4, 2, 1, bias=False),
nn.Tanh() # 使用Tanh激活函数将生成的图像像素值映射到[-1, 1]范围内
)
def forward(self, inputs):
noise_vector, label = inputs
# 通过条件标签生成器将标签映射为嵌入向量
label_output = self.label_conditioned_generator(label)
# 将嵌入向量的形状变为(batch_size, 1, 4, 4),以便与潜在向量进行合并
label_output = label_output.view(-1, 1, 4, 4)
# 通过潜在向量生成器将噪声向量映射为潜在向量
latent_output = self.latent(noise_vector)
# 将潜在向量的形状变为(batch_size, 512, 4, 4),以便与条件标签进行合并
latent_output = latent_output.view(-1, 512, 4, 4)
# 将条件标签和潜在向量在通道维度上进行合并,得到合并后的特征图
concat = torch.cat((latent_output, label_output), dim=1)
# 通过生成器的主要结构将合并后的特征图生成为RGB图像
image = self.model(concat)
return image
generator = Generator().to(device)
generator.apply(weights_init)
#print(generator)
定义判别器
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator, self).__init__()
# 定义一个条件标签的嵌入层,用于将类别标签转换为特征向量
self.label_condition_disc = nn.Sequential(
nn.Embedding(n_classes, embedding_dim), # 嵌入层将类别标签编码为固定长度的向量
nn.Linear(embedding_dim, 3*128*128) # 线性层将嵌入的向量转换为与图像尺寸相匹配的特征张量
)
# 定义主要的鉴别器模型
self.model = nn.Sequential(
nn.Conv2d(6, 64, 4, 2, 1, bias=False), # 输入通道为6(包含图像和标签的通道数),输出通道为64,4x4的卷积核,步长为2,padding为1
nn.LeakyReLU(0.2, inplace=True), # LeakyReLU激活函数,带有负斜率,增加模型对输入中的负值的感知能力
nn.Conv2d(64, 64*2, 4, 3, 2, bias=False), # 输入通道为64,输出通道为64*2,4x4的卷积核,步长为3,padding为2
nn.BatchNorm2d(64*2, momentum=0.1, eps=0.8), # 批量归一化层,有利于训练稳定性和收敛速度
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(64*2, 64*4, 4, 3, 2, bias=False), # 输入通道为64*2,输出通道为64*4,4x4的卷积核,步长为3,padding为2
nn.BatchNorm2d(64*4, momentum=0.1, eps=0.8),
nn.LeakyReLU(0.2, inplace=True),
nn.Conv2d(64*4, 64*8, 4, 3, 2, bias=False), # 输入通道为64*4,输出通道为64*8,4x4的卷积核,步长为3,padding为2
nn.BatchNorm2d(64*8, momentum=0.1, eps=0.8),
nn.LeakyReLU(0.2, inplace=True),
nn.Flatten(), # 将特征图展平为一维向量,用于后续全连接层处理
nn.Dropout(0.4), # 随机失活层,用于减少过拟合风险
nn.Linear(4608, 1), # 全连接层,将特征向量映射到输出维度为1的向量
nn.Sigmoid() # Sigmoid激活函数,用于输出范围限制在0到1之间的概率值
)
def forward(self, inputs):
img, label = inputs
# 将类别标签转换为特征向量
label_output = self.label_condition_disc(label)
# 重塑特征向量为与图像尺寸相匹配的特征张量
label_output = label_output.view(-1, 3, 128, 128)
# 将图像特征和标签特征拼接在一起作为鉴别器的输入
concat = torch.cat((img, label_output), dim=1)
# 将拼接后的输入通过鉴别器模型进行前向传播,得到输出结果
output = self.model(concat)
return output
discriminator = Discriminator().to(device)
discriminator.apply(weights_init)
#print(discriminator)
模型训练
定义损失、优化器
adversarial_loss = nn.BCELoss()
def generator_loss(fake_output, label):
gen_loss = adversarial_loss(fake_output, label)
return gen_loss
def discriminator_loss(output, label):
disc_loss = adversarial_loss(output, label)
return disc_loss
learning_rate = 0.0002
G_optimizer = optim.Adam(generator.parameters(), lr = learning_rate, betas=(0.5, 0.999))
D_optimizer = optim.Adam(discriminator.parameters(), lr = learning_rate, betas=(0.5, 0.999))
开始训练
# 设置训练的总轮数
num_epochs = 100
# 初始化用于存储每轮训练中判别器和生成器损失的列表
D_loss_plot, G_loss_plot = [], []
# 循环进行训练
for epoch in range(1, num_epochs + 1):
# 初始化每轮训练中判别器和生成器损失的临时列表
D_loss_list, G_loss_list = [], []
# 遍历训练数据加载器中的数据
for index, (real_images, labels) in enumerate(train_loader):
# 清空判别器的梯度缓存
D_optimizer.zero_grad()
# 将真实图像数据和标签转移到GPU(如果可用)
real_images = real_images.to(device)
labels = labels.to(device)
# 将标签的形状从一维向量转换为二维张量(用于后续计算)
labels = labels.unsqueeze(1).long()
# 创建真实目标和虚假目标的张量(用于判别器损失函数)
real_target = Variable(torch.ones(real_images.size(0), 1).to(device))
fake_target = Variable(torch.zeros(real_images.size(0), 1).to(device))
# 计算判别器对真实图像的损失
D_real_loss = discriminator_loss(discriminator((real_images, labels)), real_target)
# 从噪声向量中生成假图像(生成器的输入)
noise_vector = torch.randn(real_images.size(0), latent_dim, device=device)
noise_vector = noise_vector.to(device)
generated_image = generator((noise_vector, labels))
# 计算判别器对假图像的损失(注意detach()函数用于分离生成器梯度计算图)
output = discriminator((generated_image.detach(), labels))
D_fake_loss = discriminator_loss(output, fake_target)
# 计算判别器总体损失(真实图像损失和假图像损失的平均值)
D_total_loss = (D_real_loss + D_fake_loss) / 2
D_loss_list.append(D_total_loss)
# 反向传播更新判别器的参数
D_total_loss.backward()
D_optimizer.step()
# 清空生成器的梯度缓存
G_optimizer.zero_grad()
# 计算生成器的损失
G_loss = generator_loss(discriminator((generated_image, labels)), real_target)
G_loss_list.append(G_loss)
# 反向传播更新生成器的参数
G_loss.backward()
G_optimizer.step()
# 打印当前轮次的判别器和生成器的平均损失
print('Epoch: [%d/%d]: D_loss: %.3f, G_loss: %.3f' % (
(epoch), num_epochs, torch.mean(torch.FloatTensor(D_loss_list)),
torch.mean(torch.FloatTensor(G_loss_list))))
# 将当前轮次的判别器和生成器的平均损失保存到列表中
D_loss_plot.append(torch.mean(torch.FloatTensor(D_loss_list)))
G_loss_plot.append(torch.mean(torch.FloatTensor(G_loss_list)))
if epoch%10 == 0:
# 将生成的假图像保存为图片文件
save_image(generated_image.data[:50], './data/images_GAN3/sample_%d' % epoch + '.png', nrow=5, normalize=True)
# 将当前轮次的生成器和判别器的权重保存到文件
torch.save(generator.state_dict(), './training_weights/generator_epoch_%d.pth' % (epoch))
torch.save(discriminator.state_dict(), './training_weights/discriminator_epoch_%d.pth' % (epoch))
...
Epoch: [89/100]: D_loss: 0.204, G_loss: 2.987
Epoch: [90/100]: D_loss: 0.278, G_loss: 3.057
Epoch: [91/100]: D_loss: 0.245, G_loss: 3.064
Epoch: [92/100]: D_loss: 0.260, G_loss: 2.949
Epoch: [93/100]: D_loss: 0.242, G_loss: 3.050
Epoch: [94/100]: D_loss: 0.183, G_loss: 3.086
Epoch: [95/100]: D_loss: 0.205, G_loss: 3.114
Epoch: [96/100]: D_loss: 0.241, G_loss: 3.200
Epoch: [97/100]: D_loss: 0.866, G_loss: 3.776
Epoch: [98/100]: D_loss: 0.844, G_loss: 2.618
Epoch: [99/100]: D_loss: 0.293, G_loss: 2.459
Epoch: [100/100]: D_loss: 0.232, G_loss: 2.673
结果分析
模型加载
generator.load_state_dict(torch.load('./training_weights/generator_epoch_100.pth'), strict=False)
generator.eval()
模型调用
# 导入所需的库
from numpy import asarray
from numpy.random import randn
from numpy.random import randint
from numpy import linspace
from matplotlib import pyplot
from matplotlib import gridspec
# 生成潜在空间的点,作为生成器的输入
def generate_latent_points(latent_dim, n_samples, n_classes=3):
# 从标准正态分布中生成潜在空间的点
x_input = randn(latent_dim * n_samples)
# 将生成的点整形成用于神经网络的输入的批量
z_input = x_input.reshape(n_samples, latent_dim)
return z_input
# 在两个潜在空间点之间进行均匀插值
def interpolate_points(p1, p2, n_steps=10):
# 在两个点之间进行插值,生成插值比率
ratios = linspace(0, 1, num=n_steps)
# 线性插值向量
vectors = list()
for ratio in ratios:
v = (1.0 - ratio) * p1 + ratio * p2
vectors.append(v)
return asarray(vectors)
# 生成两个潜在空间的点
pts = generate_latent_points(100, 2)
# 在两个潜在空间点之间进行插值
interpolated = interpolate_points(pts[0], pts[1])
# 将数据转换为torch张量并将其移至GPU(假设device已正确声明为GPU)
interpolated = torch.tensor(interpolated).to(device).type(torch.float32)
output = None
# 对于三个类别的循环,分别进行插值和生成图片
for label in range(3):
# 创建包含相同类别标签的张量
labels = torch.ones(10) * label
labels = labels.to(device)
labels = labels.unsqueeze(1).long()
print(labels.size())
# 使用生成器生成插值结果
predictions = generator((interpolated, labels))
predictions = predictions.permute(0,2,3,1)
pred = predictions.detach().cpu()
if output is None:
output = pred
else:
output = np.concatenate((output,pred))
nrow = 3
ncol = 10
fig = plt.figure(figsize=(15,4))
gs = gridspec.GridSpec(nrow, ncol)
k = 0
for i in range(nrow):
for j in range(ncol):
pred = (output[k, :, :, :] + 1 ) * 127.5
pred = np.array(pred)
ax= plt.subplot(gs[i,j])
ax.imshow(pred.astype(np.uint8))
ax.set_xticklabels([])
ax.set_yticklabels([])
ax.axis('off')
k += 1
plt.show()


















 946
946

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









