



今天,正运动小助手为大家分析一下应用VB6.0开发一个总线初始化的运动控制应用。
我们主要从VB6.0的项目新建、函数库引用和PC函数使用方面讲起,最后通过项目实战——总线初始化例程讲解,来让大家熟悉它的项目开发。
在正式学习之前,我们先了解一下正运动技术的运动控制卡ECI2418和ECI2618。这两款产品分别是4轴,6轴运动控制卡。

ECI2418支持4轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出口支持高速PWM控制。

ECI2618支持6轴脉冲输入与编码器反馈,板载24点输入,16点输出,2AD,2DA,支持手轮接口,其中特定输出口支持高速PWM控制。
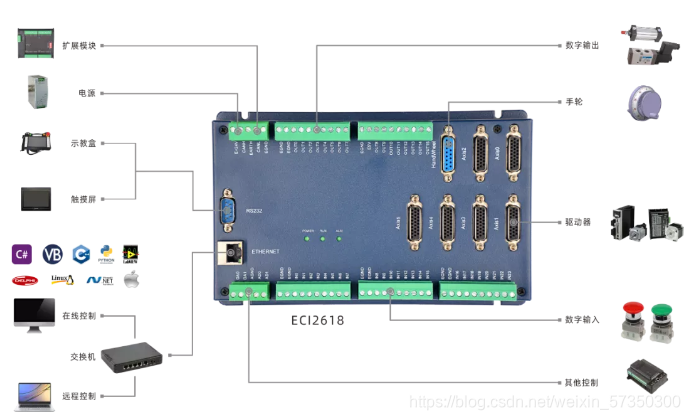
ECI2418,ECI2618均使用同一套API函数,均支持C、C++、C#、LabVIEW、Python、Delphi等开发语言,支持VC6.0、VB6.0、Qt、.Net等平台,支持Windows、Linux、WinCE、iMac等操作系统。
以下是VB6.0
开发流程
一 新建EXE工程,加载函数库。
(一)新建工程
打开Microsoft Visual Basic菜单,在“文件”→“新建工程”,选择新建“标准EXE”工程。
新建工程自带一个起始窗口,可以通过菜单“工程”→“属性”更改起始窗口。
(二)加载PC函数库
VB6.0需要对添加的dll文件进行加载,否则系统找不到函数所引用的函数库源,加载步骤如下。
1.找到厂家提供的光盘资料中的VB6.0资料。
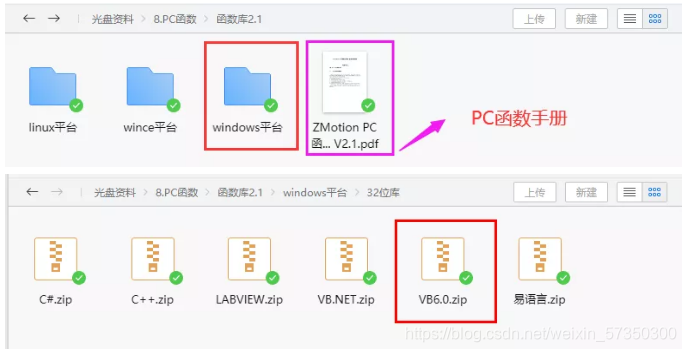
2.将VB6.0压缩包解压,找到其中的dll库文件
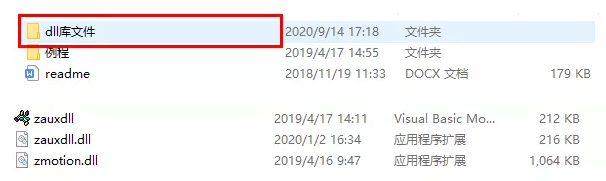
3.将dll文件zmotion.dll以及zauxdll.dll一起复制放入系统文件夹C:\Windows\System32中。假如编程系统是64位系统,也要把上述文件复制到C:\Windows\SysWOW64中。
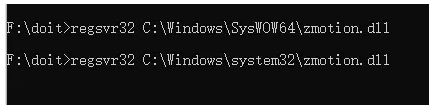
4.通过“开始”菜单→“Windows系统”→“命令提示符”或者在“开始”菜单搜索“cmd”打开命令提示符窗口,使用如下指令:
regsvr32 C:\ Windows\ SysWOW64\ zmotion.dll
regsvr32 C:\ Windows\ system32\ zmotion.dll
regsvr32命令用于注册COM组件,是Windows系统提供的用来向系统注册控件或者卸载控件的命令,以命令行方式运行。Zmotion.dll加载后,才可以调用zauxdll的函数。
可以将该条指令复制到记事本上,然后把txt文件另存为bat文件来运行。另外,一些自己下载vb6.0的额外部件也可以用该方法加载,加载后能在菜单“工程”→“引用”,“工程”→“部件”中找到对应文件,本例程使用函数库无需加载部件或引用。
(三)函数库使用
将zauxdll.bas与工程文件放入同一文件夹,方便管理。
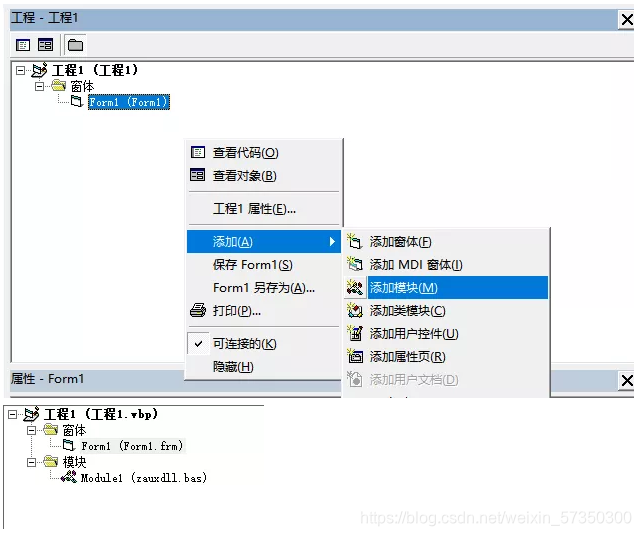
在工程资源管理器中右键添加模块,或者在菜单“工程”→“添加模块”功能中将zauxdll.bas添加入工程。
这样就做好使用正运动PC函数库的准备了。
二 查看PC函数手册,了解其用法。
(一)PC函数手册也在光盘资料里面。
具体路径如下:
(二)PC编程。
一般先根据控制器连接方式选择对应的连接函数连接控制器,返回控制器句柄。接着用返回的控制器句柄,实现对控制器的控制,大部分函数都有对控制器的指向。通常有:
Public g_handle As Long
控制器句柄是连接控制器的重要标志。
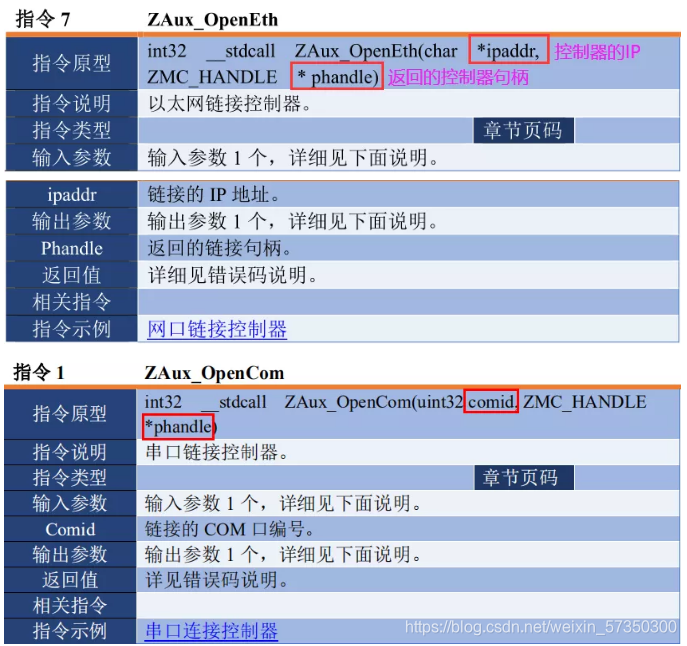
(三)通过网口连接控制器,获取句柄。
通过网口 iret = ZAux_OpenEth(“127.0.0.1”, g_handle)或者串口 iret = ZAux_OpenCom(1, g_handle)连接控制器,获取控制器句柄 g_handle。
(四)下载总线初始化bas文件
下载总线初始化 bas文件到控制器 iret = ZAux_BasDown(g_handle, sFilePath, 1),sFilePath是对应总线初始化的文件地址,利用 CommonDialog对话框操作部件,获取对象文件地址。
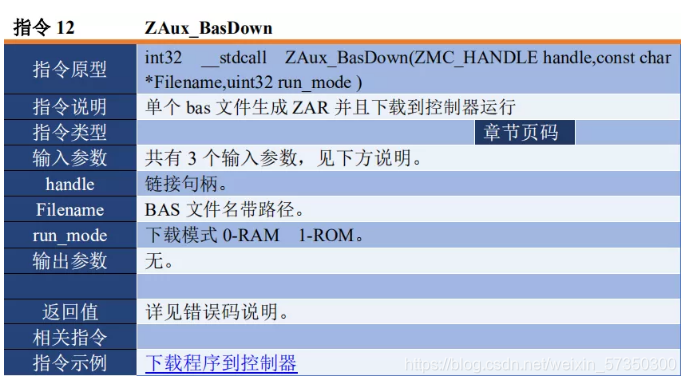
总线初始化文件是基于ZDevelop编写的EtherCAT和RTEX初始化程序,通过ZAux_BasDown方式下载到控制器以直接运行。
(五)EtherCAT数据字典读写
EtherCAT数据字典读写 ZAux_BusCmd_SDORead和 ZAux_BusCmd_SDOWrite。
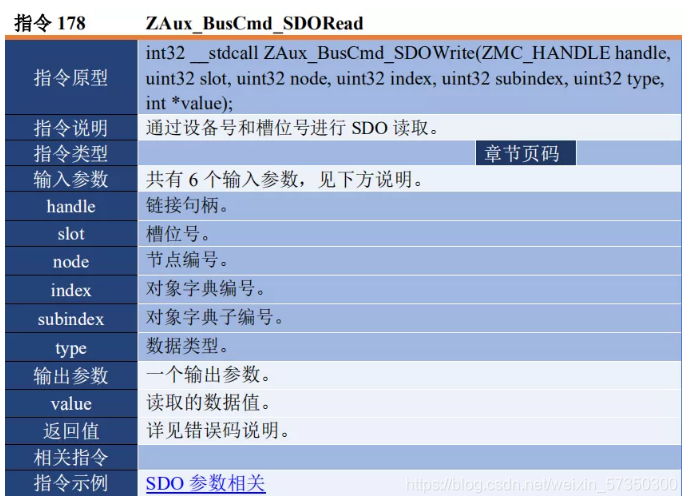
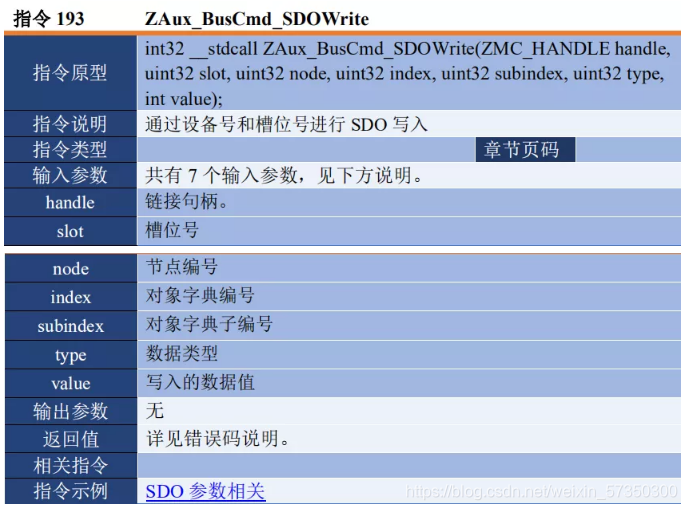
其中对象字典编号、对象字典子编号、数据类型是十进制输入,手册上是十六进制表示,使用时注意转换。
(六)位置环增益与速度环增益调整
松下A6B系列EtherCAT总线驱动器中:
位置环增益对应数据字典为 3100H-00H(第一位置环增益)和 3105H-00H(第二位置环增益);
速度环增益对应数据字典为 3101H-00H(第一速度环增益)和 3106H-00H(第二速度环增益);
自动选择增益参数的标志位为 3002H-00H。
具体请参考光盘资料(P315~P318):技术资料→ECAT通讯规格篇→MINAS_A6B系列→EtherCAT通讯/选择类型。
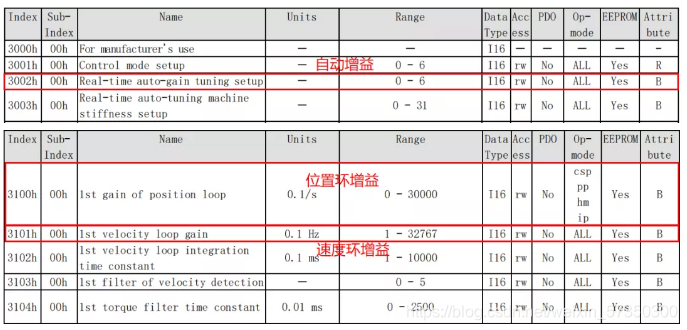
本篇文章使用第一位置环增益和第一速度环增益,通过实时自动增益调谐设置选择是否改变增益参数。
三 项目实战之连续插补运动例程讲解
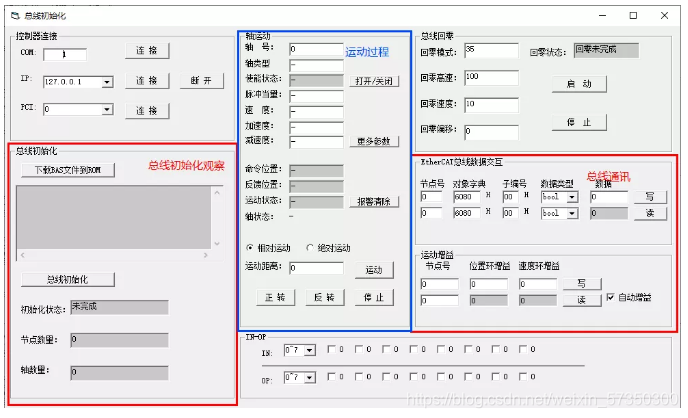
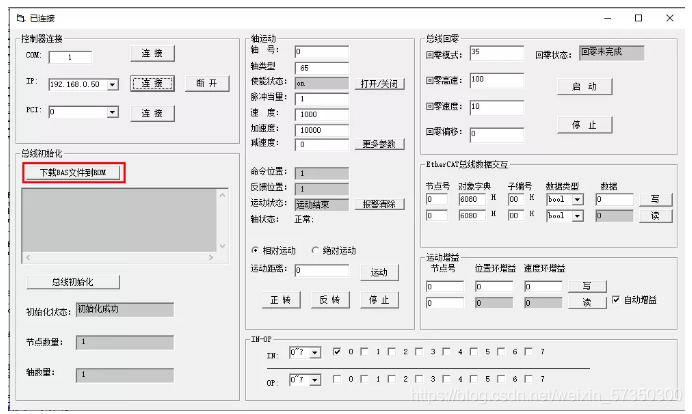
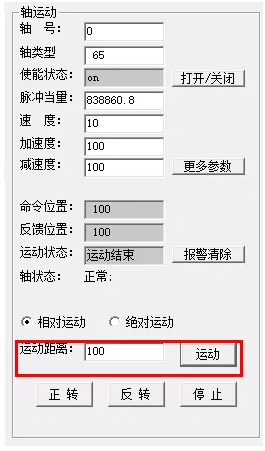
(一)界面讲解
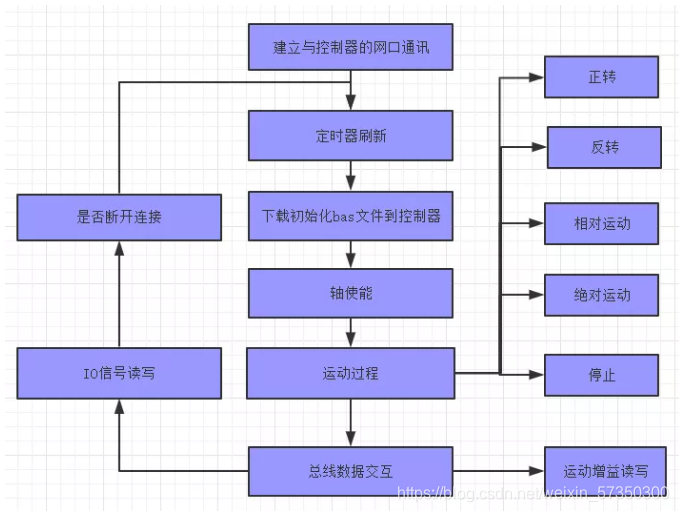
(二)例程简易流程图
//相关函数
// 建立与控制器的网口通讯
iret = ZAux_OpenEth(m_ipaddress, g_handle) '网口连接控制器
//定时器刷新
ret = ZAux_Direct_GetAxisEnable(g_handle, m_axisnum, i_AxisPara(0))
ret = ZAux_Direct_GetAxisStatus(g_handle, m_axisnum, i_AxisPara(1))
……
//下载初始化bas文件到控制器
iret = ZAux_BasDown(g_handle, sFilePath, 1) '下载到ROM
//轴使能
iret = ZAux_Direct_SetAxisEnable(g_handle, m_axisnum, 0) ‘轴使能关闭
iret = ZAux_Direct_SetAxisEnable(g_handle, m_axisnum, 1) '轴使能打开
//正转
iret = ZAux_Direct_Single_Vmove(g_handle, m_axisnum, 1)
//反转
iret = ZAux_Direct_Single_Vmove(g_handle, m_axisnum, -1)
//相对运动
iret = ZAux_Direct_Single_Move(g_handle, m_axisnum, Val(T_Move_s))
//绝对运动
iret = ZAux_Direct_Single_MoveAbs(g_handle, m_axisnum, Val(T_Move_s))
//停止
iret = ZAux_Direct_Single_Cancel(g_handle, m_axisnum, 2)
//运动增益读写
iret =ZAux_BusCmd_SDORead(g_handle, 0, T_SdoNode, Val(CLng("&H" & "3100")), 0, 3, m_sdo_data2_1)
iret =ZAux_BusCmd_SDORead(g_handle, 0, T_SdoNode, Val(CLng("&H" & "3101")), 0, 3, m_sdo_data2_2)
// IO信号读写
iret = ZAux_Direct_GetIn(g_handle, i , IN_status)
iret = ZAux_Direct_GetOp(g_handle, i , OP_status)
iret = ZAux_Direct_SetOp(g_handle, i , OP_status)
(三)模块程序
1.初始化变量
Public g_handle As Long '当前使用的卡句柄
Public iret As Long '函数返回值
Public g_basflag As Boolean '//BAS文件加载标志位
Public g_InitStatus As Integer '//总线初始化完成状态 0-失败 1-成功 -1-初始化未完成
Public Bus_type As Single '//BAS文件中变量判断总线类型,也作为BAS文件是否下载成功判断
Public if_home As Boolean
Public m_axisnum As Integer
2.控制器连接
Private Sub T_OpenCom_Click() '串口连接
If g_handle <> 0 Then '断开前面的连接
ZAux_Close (g_handle)
g_handle= 0
End If
iret= ZAux_OpenCom(Val(T_ComId.Text), g_handle)
If (g_handle <> 0) Then
Form1.Caption = "已连接"
Timer1.Enabled = True
T_AxisId_Change
Dim ret As Integer
iret= ZAux_Direct_GetUserVar(g_handle, "BUS_TYPE", Bus_type)
'读取BAS文件中的变量判断是否有加载BAS文件
If (iret= 0 And Bus_type <> -1) Then
g_basflag= True'//文件已经加载
End If
Else
Form1.Caption = "未连接"
MsgBox "控制器链接失败,请检测IP地址!", vbOKOnly, "警告"
End If
End Sub
Private Sub T_IpAddress_DropDown() '下拉搜索IP
Dim Buffer As String * 10240
T_IpAddress.Clear
T_IpAddress.AddItem ("127.0.0.1")
iret= ZAux_SearchEthlist(Buffer, 10230, 200) '搜索IP地址列表
Dim Ip_List() As String
Ip_List= Split(Buffer, " ")
For i= 0 To UBound(Ip_List)
T_IpAddress.AddItem (Ip_List(i))
Next
End Sub
Private Sub T_OpenEth_Click() '以太网连接
Dim m_ipaddress As String
m_ipaddress= T_IpAddress.Text
If g_handle <> 0 Then '断开前面的连接
ZAux_Close (g_handle)
g_handle= 0
End If
iret= ZAux_OpenEth(m_ipaddress, g_handle)'网口连接控制器
If (g_handle <> 0) Then
Form1.Caption= "已连接"
Timer1.Enabled = True
T_AxisId_Change
iret = ZAux_Direct_GetUserVar(g_handle, "BUS_TYPE", Bus_type)
'读取BAS文件中的变量判断是否有加载BAS文件
If (iret= 0 And Bus_type <> -1) Then
g_basflag = True'//文件已经加载
End If
Else
Form1.Caption = "未连接"
MsgBox "控制器链接失败,请检测IP地址!", vbOKOnly, "警告"
End If
End Sub
Private Sub T_PciId_DropDown() '下拉搜索PCI
Dim m_maxpci As Integer
T_PciId.Clear
m_maxpci= ZAux_GetMaxPciCards()
For i= 0 To m_maxpci - 1
T_PciId.AddItem (i.ToString())
Next
End Sub
Private Sub T_OpenPci_Click()
Dim m_cardid As Integer
If g_handle <> 0 Then '断开前面的连接
ZAux_Close (g_handle)
g_handle= 0
End If
m_cardid= Val(PCIADDRESS.Text)
iret= ZAux_OpenPci(m_cardid, g_handle)'PCI方式连接
If g_handle <> 0 Then
Form1.Caption= "已连接"
Timer1.Enabled = True
T_AxisId_Change
Dim ret As Integer
iret= ZAux_Direct_GetUserVar(g_handle, "BUS_TYPE", Bus_type)
'读取BAS文件中的变量判断是否有加载BAS文件
If (iret = 0 And Bus_type <> -1) Then
g_basflag= True'//文件已经加载
End If
Else
MsgBox "连接失败,请检查PCI", vbOKOnly, "提示"
Form1.Caption = "未连接"
End If
End Sub
Private Sub T_Close_Click()
'断开链接
If (g_handle <> 0) Then
Timer1.Enabled = False
ZAux_Close (g_handle)
g_handle= 0
Form1.Caption= "未连接"
End If
End Sub
3.总线初始化
Private Sub T_DownLoad_Click() '下载文件到控制器
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
WithCommonDialog1
.Filename = "Basic1"
.InitDir = App.Path
.CancelError = True
.Filter = "文件(*.bas)|*.bas"
End With
Me.CommonDialog1.ShowOpen
sFilePath = Me.CommonDialog1.Filename
T_BasFile.Text = sFilePath
iret = ZAux_BasDown(g_handle, sFilePath, 1) '//下载到ROM
If (iret <> 0) Then
MsgBox "文件下载失败!", vbOKOnly, "提示"
Else
MsgBox "下载成功!", vbOKOnly, "提示"
End If
End If
End Sub
'重新初始化总线,下载ROM时程序会自动初始化一次
PrivateSub T_BusInit_Click()
If(g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
If(g_basflag And(g_InitStatus <> -1)) Then '-1:可能正在执行初始化
g_InitStatus = -1
Dim Buffer As String * 10240
T_BusStatus.Text = "初始化未完成"
'任务1重新运行BAS中的初始化函数
iret = ZAux_Execute(g_handle, "RUNTASK 1,Ecat_Init", Buffer, 0)
Else
MsgBox "Bas文件未加载!", vbOKOnly, "提示"
End If
End If
EndSub
4.轴运动
Private Sub T_SetEnable_Click() '//切换使能
If (g_handle= 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
If (T_EnableStatus.Text= "on") Then
iret = ZAux_Direct_SetAxisEnable(g_handle, m_axisnum, 0)
Else
iret= ZAux_Direct_SetAxisEnable(g_handle, m_axisnum, 1)
End If
End If
End Sub
Private Sub T_ClearAlm_Click() '//清除轴报警
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
iret= ZAux_BusCmd_DriveClear(g_handle, m_axisnum, 0)
End If
End Sub
Private Sub T_FwdMove_Click() '正转
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
iret= ZAux_Direct_SetUnits(g_handle,m_axisnum,Val(T_Units.Text))
iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_Speed.Text))
iret= ZAux_Direct_SetAccel(g_handle,m_axisnum,Val(T_Accel.Text))
iret= ZAux_Direct_Single_Vmove(g_handle,m_axisnum,1)
End If
End Sub
Private Sub T_RevMove_Click() '反转
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
iret= ZAux_Direct_SetUnits(g_handle,m_axisnum,Val(T_Units.Text))
iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_Speed.Text))
iret= ZAux_Direct_SetAccel(g_handle,m_axisnum,Val(T_Accel.Text))
iret= ZAux_Direct_Single_Vmove(g_handle,m_axisnum,-1)
End If
End Sub
Private Sub T_Move_Click() '运动
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
iret= ZAux_Direct_SetUnits(g_handle,m_axisnum,Val(T_Units.Text))
iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_Speed.Text))
iret= ZAux_Direct_SetAccel(g_handle,m_axisnum,Val(T_Accel.Text))
If T_moveType(0).value = True Then
iret= ZAux_Direct_Single_Move(g_handle, m_axisnum,Val(T_Move_s))
ElseIf T_moveType(1).value = True Then
iret= ZAux_Direct_Single_MoveAbs(g_handle,m_axisnum,Val(T_Move_s))
End If
End If
End Sub
Private Sub T_Move_Click() '运动
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
iret= ZAux_Direct_SetUnits(g_handle,m_axisnum,Val(T_Units.Text))
iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_Speed.Text))
iret= ZAux_Direct_SetAccel(g_handle,m_axisnum,Val(T_Accel.Text))
If T_moveType(0).value = True Then
iret= ZAux_Direct_Single_Move(g_handle,m_axisnum, Val(T_Move_s))
ElseIf T_moveType(1).value = True Then
iret= ZAux_Direct_Single_MoveAbs(g_handle,m_axisnum,Val(T_Move_s))
End If
End If
End Sub
Private Sub T_Stop_Click() '停止
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
iret= ZAux_Direct_Single_Cancel(g_handle, m_axisnum, 2)
End If
End Sub
5.总线回零
Private Sub T_StartHome_Click() '驱动器自身回零
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
If (Bus_type= 0) Then
iret= ZAux_Direct_SetSpeed(g_handle,m_axisnum,Val(T_HomeSp1.Text))
iret= ZAux_Direct_SetCreep(g_handle,m_axisnum,Val(T_HomeSp2.Text))
iret= ZAux_BusCmd_SetDatumOffpos(g_handle,m_axisnum, _
Val(T_HomeOffpos.Text))
iret= ZAux_BusCmd_Datum(g_handle,m_axisnum,Val(T_HomeMode.Text))
Else
MsgBox "rtex不支持!", vbOKOnly, "提示"
End If
End If
End Sub
Private Sub T_StopHome_Click() '停止
T_Stop_Click
End Sub
6.总线数据交互
Private Sub T_EcatWrite_Click() 'ETHERCAT写
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
If (Bus_type = 0) Then
Dim m_sdo_node0 As Long
Dim m_sdo_index0 As Long
Dim m_sdo_sub0 As Long
Dim m_sdo_type0 As Long
Dim m_sdo_data0 As Long
m_sdo_node0 = Val(T_SdoNode0.Text)
m_sdo_index0= Val(T_SdoIndex0.Text)
m_sdo_sub0= Val(T_SdoSub0.Text)
m_sdo_type0= T_SdoType0.ListIndex + 1
m_sdo_data0= Val(T_SdoData0.Text)
iret= ZAux_BusCmd_SDOWrite(g_handle,0, _
m_sdo_node0,m_sdo_index0,m_sdo_sub0,m_sdo_type0,m_sdo_data0)
If (iret <> 0) Then
MsgBox "写入失败!", vbOKOnly, "提示"
End If
Else
MsgBox "非ETHERCAT模块!", vbOKOnly, "提示"
End If
End If
End Sub
Private Sub T_EcatRead_Click() 'ETHERCAT读取
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
If (Bus_type = 0) Then
Dim m_sdo_node1 As Long
Dim m_sdo_index1 As Long
Dim m_sdo_sub1 As Long
Dim m_sdo_type1 As Long
Dim m_sdo_data1 As Long
m_sdo_node1 = Val(T_SdoNode1.Text)
m_sdo_index1 = Val(T_SdoIndex1.Text)
m_sdo_sub1 = Val(T_SdoSub1.Text)
m_sdo_type1 = T_SdoType1.ListIndex + 1
m_sdo_data1 = 0
iret=ZAux_BusCmd_SDORead(g_handle,0, _
m_sdo_node1, m_sdo_index1, m_sdo_sub1, m_sdo_type1, m_sdo_data1)
If (iret <> 0) Then
MsgBox "读取失败!", vbOKOnly, "提示"
Else
T_SdoData1.Text = Str(m_sdo_data1)
End If
Else
MsgBox "非ETHERCAT模块!", vbOKOnly, "提示"
End If
End If
End Sub
Private Sub auto_gain_check_Click() '自动增益标志设置
If (Bus_type = 0) Then
If auto_gain_check.value = 0 Then
iret=ZAux_BusCmd_SDOWrite(g_handle,0, Val(T_SdoNode2.Text), Val(CLng("&H" & "3002")), 0, 3, 0)
Else
iret= ZAux_BusCmd_SDOWrite(g_handle, 0, Val(T_SdoNode2.Text), Val(CLng("&H" & "3002")), 0, 3, 1)
End If
Else
MsgBox "非ETHERCAT模块!", vbOKOnly, "提示"
End If
End Sub
Private Sub T_ECAT_W_Click() '速度环、位置环增益写
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
If (Bus_type = 0) Then
iret = ZAux_BusCmd_SDOWrite(g_handle,0, Val(T_SdoNode2.Text), Val(CLng("&H"&"3100")), 0, 3, Val(T_PostGain_W.Text)) '位置环增益写
iret = iret + ZAux_BusCmd_SDOWrite(g_handle, 0, Val(T_SdoNode2.Text), Val(CLng("&H" & "3101")), 0, 3, Val(T_VeloGain_W.Text)) '速度环增益写
If (iret <> 0) Then
MsgBox "写入失败!", vbOKOnly, "提示"
End If
Else
MsgBox "非ETHERCAT模块!", vbOKOnly, "提示"
End If
End If
End Sub
Private Sub T_ECAT_R_Click() '速度环、位置环增益读
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
If (Bus_type = 0) Then
iret = ZAux_BusCmd_SDORead(g_handle, 0, Val(T_SdoNode3.Text), Val(CLng("&H" & "3100")), 0, 3, m_sdo_data2_1) '位置环增益读
iret = iret + ZAux_BusCmd_SDORead(g_handle, 0, Val(T_SdoNode3.Text), Val(CLng("&H" & "3101")), 0, 3, m_sdo_data2_2) '速度环增益读
If (iret <> 0) Then
MsgBox "写入失败!", vbOKOnly, "提示"
Else
T_PostGain_R = Str(m_sdo_data2_1)
T_VeloGain_R = Str(m_sdo_data2_2)
End If
Else
MsgBox "非ETHERCAT模块!", vbOKOnly, "提示"
End If
End If
End Sub
7.IO口操作
Sub IN_OP_read() 'IO口读取
Dim IN_status As Long
Dim OP_status As Long
Dim in_page As Long
Dim op_page As Long
in_page = T_IN_page.ListIndex
op_page = T_OP_page.ListIndex
Dim i
For i = 0 To 7
iret = ZAux_Direct_GetIn(g_handle, i + in_page * 8, IN_status)
iret = ZAux_Direct_GetOp(g_handle, i + op_page * 8, OP_status)
T_IN_Check(i).value = IN_status
T_IN_Check(i).Caption = Str(i + in_page * 8)
T_OP_Check(i).value = OP_status
T_OP_Check(i).Caption = Str(i + op_page * 8)
Next
End Sub
Private Sub T_OP_Check_Click(Index As Integer) '输出口使能
Dim OP_status As Long
Dim op_page As Long
op_page = T_OP_page.ListIndex
OP_status = T_OP_Check(Index).value
iret = ZAux_Direct_SetOp(g_handle, Index + op_page * 8, OP_status)
End Sub
8.参数刷新
1)在主窗体
Private Sub Form_Load() '窗体加载时运行
g_handle = 0
g_basflag = False
g_InitStatus = -1
Bus_type = -1
if_home = False
m_axisnum = 0
T_IN_page.ListIndex = 0 '初始化IO列表初值
T_OP_page.ListIndex = 0
End Sub
Private Sub Form_QueryUnload(Cancel As Integer, UnloadMode As Integer)
End '关闭主窗体时关闭程序
End Sub
Private Sub Form_Unload(Cancel As Integer)
'断开链接
If (g_handle <> 0) Then
Timer1.Enabled = False
ZAux_Close (g_handle)
g_handle = 0
End If
Dim myForm As Form
For Each myForm In Forms
Unload myForm
Set myForm = Nothing
Private Sub T_morePara_Click()
Form2.Show
End Sub
Private Sub Timer1_Timer()
Dim ret As Long
Dim f_AxisPara(10) As Single
Dim i_AxisPara(10) As Long
If g_handle <> 0 Then
ret = 0
m_axisnum = Val(T_AxisId.Text)
ret = ZAux_Direct_GetAxisEnable(g_handle, m_axisnum, i_AxisPara(0))
ret = ret + ZAux_Direct_GetMpos(g_handle, m_axisnum, f_AxisPara(0))
ret = ret + ZAux_Direct_GetDpos(g_handle, m_axisnum, f_AxisPara(1))
ret = ret + ZAux_Direct_GetAxisStatus(g_handle, m_axisnum, i_AxisPara(1))
ret = ret + ZAux_Direct_GetIfIdle(g_handle, m_axisnum, i_AxisPara(2))
If (ret = 0) Then
If i_AxisPara(0) = 0 Then
T_EnableStatus.Text = "off"
Else
T_EnableStatus.Text = "on"
End If
T_Dpos.Text = Str(f_AxisPara(0))
T_Mpos.Text = Str(f_AxisPara(1))
Call re_transfro(i_AxisPara(1), i_AxisPara(2))
End If
If (((i_AxisPara(1) And 64) = 64) And (if_home = False)) Then '//第6位是否被置1
T_HomeStatus.Text = "回零中"
if_home = True
ElseIf ((i_AxisPara(1) = 0) And if_home) Then
Dim homestatus As Long
homestatus = 0
ret = ZAux_BusCmd_GetHomeStatus(g_handle, m_axisnum, homestatus)
If homestatus = 1 Then
T_HomeStatus.Text = "回零完成"
Else
T_HomeStatus.Text = "回零未完成"
End If
if_home = False
End If
If (g_basflag And g_InitStatus = -1) Then '//已经加载文件并且正在初始化 读取状态
Dim tempstatus As Single
Dim m_BusNodeNum As Long
Dim m_BusAxisNum As Single
tempstatus = -1
m_BusNodeNum = 0
m_BusAxisNum = 0
ret = ZAux_Direct_GetUserVar(g_handle, "BUS_TYPE", Bus_type)
'//读取BAS文件中的变量判断总线类型
ret = ret + ZAux_Direct_GetUserVar(g_handle, "Bus_InitStatus", tempstatus) '//读取BAS文件中的变量判断总线初始化完成状态
ret = ret + ZAux_BusCmd_GetNodeNum(g_handle, 0, m_BusNodeNum)
'//读取槽位0上节点个数。
ret = ret + ZAux_Direct_GetUserVar(g_handle, "Bus_TotalAxisnum", m_BusAxisNum)
'//读取BAS文件中的变量判断扫描的总轴数
g_InitStatus = tempstatus
'//初始化完成刷新状态
If (ret = 0 And g_InitStatus <> -1) Then
If g_InitStatus = 1 Then
T_BusStatus.Text = "初始化成功"
Else
T_BusStatus.Text = "初始化失败"
End If
T_NodeNum.Text = Str(m_BusNodeNum)
T_AxisNum.Text = Str(m_BusAxisNum)
End If
End If
Call IN_OP_read
End If
End Sub
Sub re_transfro(axisStatues, axisIdle)
Dim axisStatues_str As String
Dim axisIdle_str As String
axisStatues_str = ""
If axisStatues = 0 Then
axisStatues_str = "正常;"
Else
Dim quo As Long
Dim mod_tr(24) As Long
Dim i As Long
quo = axisStatues
For i = 0 To 23
mod_tr(i) = quo Mod 2
quo = quo \ 2
Next
If mod_tr(1) Then axisStatues_str = axisStatues_str + "随动误差超限告警;"
If mod_tr(2) Then axisStatues_str = axisStatues_str + "与远程通讯出错;"
If mod_tr(3) Then axisStatues_str = axisStatues_str + "远程驱动器报错;"
If mod_tr(4) Then axisStatues_str = axisStatues_str + "正向硬限位;"
If mod_tr(5) Then axisStatues_str = axisStatues_str + "反向硬限位;"
If mod_tr(6) Then axisStatues_str = axisStatues_str + "找原点;"
If mod_tr(7) Then axisStatues_str = axisStatues_str + "hold速度保持信号输入;"
If mod_tr(8) Then axisStatues_str = axisStatues_str + "随动误差超限出错;"
If mod_tr(9) Then axisStatues_str = axisStatues_str + "超过正向软限位;"
If mod_tr(10) Then axisStatues_str = axisStatues_str + "超过负向软限位;"
If mod_tr(11) Then axisStatues_str = axisStatues_str + "CANCEL执行中;"
If mod_tr(12) Then axisStatues_str = axisStatues_str + "脉冲频率超过最大速度;"
If mod_tr(14) Then axisStatues_str = axisStatues_str + "机械手指令坐标错误;"
If mod_tr(18) Then axisStatues_str = axisStatues_str + "电源异常;"
If mod_tr(21) Then axisStatues_str = axisStatues_str + "运动中触发特殊运动指令失败;"
If mod_tr(22) Then axisStatues_str = axisStatues_str + "告警信号输入;"
If mod_tr(23) Then axisStatues_str = axisStatues_str + "轴进入暂停状态;"
End If
If axisIdle = 0 Then
axisIdle_str = "运动中"
Else
axisIdle_str = "运动结束"
End If
T_AxisStatus.Caption = axisStatues_str
T_Idle.Text = axisIdle_str
End Sub
Private Sub T_AxisId_Change() '修改轴参数
If (g_handle = 0) Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
Dim f_AxisPara(10) As Single
Dim m_atype As Long
m_atype = 0
m_axisnum = Val(T_AxisId.Text)
iret = ZAux_Direct_GetUnits(g_handle, m_axisnum, f_AxisPara(0))
iret = iret + ZAux_Direct_GetSpeed(g_handle, m_axisnum, f_AxisPara(1))
iret = iret + ZAux_Direct_GetAccel(g_handle, m_axisnum, f_AxisPara(2))
iret = iret + ZAux_Direct_GetDecel(g_handle, m_axisnum, f_AxisPara(3))
iret = iret + ZAux_Direct_GetAtype(g_handle, m_axisnum, m_atype)
If (iret = 0) Then
T_Atype.Text = Str(m_atype)
T_Units.Text = Str(f_AxisPara(0))
T_Speed.Text = Str(f_AxisPara(1))
T_Accel.Text = Str(f_AxisPara(2))
T_Decel.Text = Str(f_AxisPara(3))
End If
End If
End Sub
2)在子窗体
Private d_AxisPara(73) As Variant '变体类型,使数组包含single和long型
Private d_AxisNum As Long
Public g_handle As Long
Public Sub para_reflash() '读取参数
Dim ret As Long
Dim paraS(3) As Single
ret = 0
d_AxisNum = Val(S_Axisnum.Text)
g_handle = Form1.g_handle
If (g_handle <> 0) Then
ret = ZAux_Direct_GetAtype(g_handle, d_AxisNum, d_AxisPara(0))
ret = ZAux_Direct_GetUnits(g_handle, d_AxisNum, d_AxisPara(1))
ret = ZAux_Direct_GetAccel(g_handle, d_AxisNum, d_AxisPara(2))
ret = ZAux_Direct_GetDecel(g_handle, d_AxisNum, d_AxisPara(3))
ret = ZAux_Direct_GetSpeed(g_handle, d_AxisNum, d_AxisPara(4))
ret = ZAux_Direct_GetCreep(g_handle, d_AxisNum, d_AxisPara(5))
ret = ZAux_Direct_GetLspeed(g_handle, d_AxisNum, d_AxisPara(6))
ret = ZAux_Direct_GetMerge(g_handle, d_AxisNum, d_AxisPara(7))
ret = ZAux_Direct_GetSramp(g_handle, d_AxisNum, d_AxisPara(8))
ret = ZAux_Direct_GetEndMove(g_handle, d_AxisNum, d_AxisPara(11))
ret = ZAux_Direct_GetFsLimit(g_handle, d_AxisNum, d_AxisPara(12))
ret = ZAux_Direct_GetRsLimit(g_handle, d_AxisNum, d_AxisPara(13))
ret = ZAux_Direct_GetDatumIn(g_handle, d_AxisNum, d_AxisPara(14))
ret = ZAux_Direct_GetFwdIn(g_handle, d_AxisNum, d_AxisPara(15))
ret = ZAux_Direct_GetRevIn(g_handle, d_AxisNum, d_AxisPara(16))
ret = ZAux_Direct_GetAllAxisInfo(g_handle, d_AxisNum, d_AxisPara(17), d_AxisPara(9), d_AxisPara(10), d_AxisPara(25))
ret = ZAux_Direct_GetLoaded(g_handle, d_AxisNum, d_AxisPara(18))
ret = ZAux_Direct_GetMspeed(g_handle, d_AxisNum, d_AxisPara(19))
ret = ZAux_Direct_GetMtype(g_handle, d_AxisNum, d_AxisPara(20))
'ret = ZAux_Direct_GetNtype(g_handle, d_AxisNum, d_AxisPara(21))
ret = ZAux_Direct_GetRemain(g_handle, d_AxisNum, d_AxisPara(22))
ret = ZAux_Direct_GetVectorBuffered(g_handle, d_AxisNum, d_AxisPara(23))
ret = ZAux_Direct_GetVpSpeed(g_handle, d_AxisNum, d_AxisPara(24))
ret = ZAux_Direct_GetMoveCurmark(g_handle, d_AxisNum, d_AxisPara(27))
d_AxisPara(26) = d_AxisPara(27)'读取运动标号与当前运动标号相同
ret = ZAux_Direct_GetAxisStopReason(g_handle, d_AxisNum, d_AxisPara(28))
ret = ZAux_Direct_GetMovesBuffered(g_handle, d_AxisNum, d_AxisPara(29))
ret = ZAux_Direct_GetAxisAddress(g_handle, d_AxisNum, d_AxisPara(30))
ret = ZAux_Direct_GetAxisEnable(g_handle, d_AxisNum, d_AxisPara(31))
ret = ZAux_Direct_GetForceSpeed(g_handle, d_AxisNum, d_AxisPara(32))
ret = ZAux_Direct_GetStartMoveSpeed(g_handle, d_AxisNum, d_AxisPara(33))
ret = ZAux_Direct_GetEndMoveSpeed(g_handle, d_AxisNum, d_AxisPara(34))
ret = ZAux_Direct_GetFastDec(g_handle, d_AxisNum, d_AxisPara(35))
ret = ZAux_Direct_GetAddax(g_handle, d_AxisNum, d_AxisPara(36))
ret = ZAux_Direct_GetLinkax(g_handle, d_AxisNum, d_AxisPara(37))
ret = ZAux_Direct_GetCornerMode(g_handle, d_AxisNum, d_AxisPara(38))
ret = ZAux_Direct_GetDecelAngle(g_handle, d_AxisNum, d_AxisPara(39))
ret = ZAux_Direct_GetStopAngle(g_handle, d_AxisNum, d_AxisPara(40))
ret = ZAux_Direct_GetFullSpRadius(g_handle, d_AxisNum, d_AxisPara(41))
d_AxisPara(42) = d_AxisPara(32) '限速值取SP速度
ret = ZAux_Direct_GetZsmooth(g_handle, d_AxisNum, d_AxisPara(43))
ret = ZAux_Direct_GetVectorBuffered(g_handle, d_AxisNum, d_AxisPara(44))
ret = ZAux_Direct_GetEndMoveBuffer(g_handle, d_AxisNum, d_AxisPara(45))
ret = ZAux_Direct_GetHomeWait(g_handle, d_AxisNum, d_AxisPara(46))
ret = ZAux_Direct_GetFastJog(g_handle, d_AxisNum, d_AxisPara(47))
ret = ZAux_Direct_GetFwdJog(g_handle, d_AxisNum, d_AxisPara(48))
ret = ZAux_Direct_GetRevJog(g_handle, d_AxisNum, d_AxisPara(49))
ret = ZAux_Direct_GetJogSpeed(g_handle, d_AxisNum, d_AxisPara(50))
ret = ZAux_Direct_GetFholdIn(g_handle, d_AxisNum, d_AxisPara(51))
ret = ZAux_Direct_GetFhspeed(g_handle, d_AxisNum, d_AxisPara(52))
ret = ZAux_Direct_GetEncoder(g_handle, d_AxisNum, d_AxisPara(53))
ret = ZAux_Direct_GetMark(g_handle, d_AxisNum, d_AxisPara(57))
ret = ZAux_Direct_GetMarkB(g_handle, d_AxisNum, d_AxisPara(58))
ret = ZAux_Direct_GetRegPos(g_handle, d_AxisNum, d_AxisPara(61))
ret = ZAux_Direct_GetRegPosB(g_handle, d_AxisNum, d_AxisPara(62))
ret = ZAux_Direct_GetAlmIn(g_handle, d_AxisNum, d_AxisPara(65))
ret = ZAux_Direct_GetRepOption(g_handle, d_AxisNum, d_AxisPara(66))
ret = ZAux_Direct_GetRepDist(g_handle, d_AxisNum, d_AxisPara(67))
ret = ZAux_Direct_GetInvertStep(g_handle, d_AxisNum, d_AxisPara(68))
ret = ZAux_Direct_GetMaxSpeed(g_handle, d_AxisNum, d_AxisPara(69))
ret = ZAux_Direct_GetDAC(g_handle, d_AxisNum, d_AxisPara(71))
ret = ZAux_Direct_GetErrormask(g_handle, d_AxisNum, d_AxisPara(72))
End If
End Sub
Public Sub para_reset() '写入参数
Dim ret As Long
ret = 0
d_AxisNum = Val(S_Axisnum.Text)
g_handle = Form1.g_handle
If (g_handle <> 0) Then
Dim i
For i = 0 To 72
d_AxisPara(i) = Val(S_Axispara(i))
Next
ret = ZAux_Direct_SetAtype(g_handle, d_AxisNum, d_AxisPara(0))
ret = ZAux_Direct_SetUnits(g_handle, d_AxisNum, d_AxisPara(1))
ret = ZAux_Direct_SetAccel(g_handle, d_AxisNum, d_AxisPara(2))
ret = ZAux_Direct_SetDecel(g_handle, d_AxisNum, d_AxisPara(3))
ret = ZAux_Direct_SetSpeed(g_handle, d_AxisNum, d_AxisPara(4))
ret = ZAux_Direct_SetCreep(g_handle, d_AxisNum, d_AxisPara(5))
ret = ZAux_Direct_SetLspeed(g_handle, d_AxisNum, d_AxisPara(6))
ret = ZAux_Direct_SetMerge(g_handle, d_AxisNum, d_AxisPara(7))
ret = ZAux_Direct_SetSramp(g_handle, d_AxisNum, d_AxisPara(8))
ret = ZAux_Direct_SetDpos(g_handle, d_AxisNum, d_AxisPara(9))
ret = ZAux_Direct_SetMpos(g_handle, d_AxisNum, d_AxisPara(10))
ret = ZAux_Direct_SetFsLimit(g_handle, d_AxisNum, d_AxisPara(12))
ret = ZAux_Direct_SetRsLimit(g_handle, d_AxisNum, d_AxisPara(13))
ret = ZAux_Direct_SetDatumIn(g_handle, d_AxisNum, d_AxisPara(14))
ret = ZAux_Direct_SetFwdIn(g_handle, d_AxisNum, d_AxisPara(15))
ret = ZAux_Direct_SetRevIn(g_handle, d_AxisNum, d_AxisPara(16))
ret = ZAux_Direct_SetMovemark(g_handle, d_AxisNum, d_AxisPara(26))
ret = ZAux_Direct_SetAxisAddress(g_handle, d_AxisNum, d_AxisPara(30))
ret = ZAux_Direct_SetAxisEnable(g_handle, d_AxisNum, d_AxisPara(31))
ret = ZAux_Direct_SetForceSpeed(g_handle, d_AxisNum, d_AxisPara(32))
ret = ZAux_Direct_SetStartMoveSpeed(g_handle, d_AxisNum, d_AxisPara(33))
ret = ZAux_Direct_SetEndMoveSpeed(g_handle, d_AxisNum, d_AxisPara(34))
ret = ZAux_Direct_SetFastDec(g_handle, d_AxisNum, d_AxisPara(35))
ret = ZAux_Direct_SetCornerMode(g_handle, d_AxisNum, d_AxisPara(38))
ret = ZAux_Direct_SetDecelAngle(g_handle, d_AxisNum, d_AxisPara(39))
ret = ZAux_Direct_SetStopAngle(g_handle, d_AxisNum, d_AxisPara(40))
ret = ZAux_Direct_SetFullSpRadius(g_handle, d_AxisNum, d_AxisPara(41))
ret = ZAux_Direct_SetZsmooth(g_handle, d_AxisNum, d_AxisPara(43))
ret = ZAux_Direct_SetHomeWait(g_handle, d_AxisNum, d_AxisPara(46))
ret = ZAux_Direct_SetFastJog(g_handle, d_AxisNum, d_AxisPara(47))
ret = ZAux_Direct_SetFwdJog(g_handle, d_AxisNum, d_AxisPara(48))
ret = ZAux_Direct_SetRevJog(g_handle, d_AxisNum, d_AxisPara(49))
ret = ZAux_Direct_SetJogSpeed(g_handle, d_AxisNum, d_AxisPara(50))
ret = ZAux_Direct_SetFholdIn(g_handle, d_AxisNum, d_AxisPara(51))
ret = ZAux_Direct_SetFhspeed(g_handle, d_AxisNum, d_AxisPara(52))
ret = ZAux_Direct_SetAlmIn( g_handle, d_AxisNum, d_AxisPara(65))
ret = ZAux_Direct_SetRepOption(g_handle, d_AxisNum, d_AxisPara(66))
ret = ZAux_Direct_SetRepDist(g_handle, d_AxisNum, d_AxisPara(67))
ret = ZAux_Direct_SetInvertStep(g_handle, d_AxisNum, d_AxisPara(68))
ret = ZAux_Direct_SetMaxSpeed(g_handle, d_AxisNum, d_AxisPara(69))
ret = ZAux_Direct_SetDAC(g_handle, d_AxisNum, d_AxisPara(71))
ret = ZAux_Direct_SetErrormask(g_handle, d_AxisNum, d_AxisPara(72))
End If
End Sub
Private Sub Form_Load()
S_Axisnum.Text = Form1.T_AxisId.Text
S_reflash.value = 1
Timer1.Enabled = True
End Sub
Private Sub Form_Unload(Cancel As Integer)
Timer1.Enabled = False
End Sub
Private Sub S_Setpara_Click()
If Form1.g_handle = 0 Then
MsgBox "未链接到控制器!", vbOKOnly, "提示"
Else
Call para_reset
S_reflash.value = 1
End If
End Sub
Private Sub Timer1_Timer()'刷新
Dim i
If Form1.g_handle <> 0 And S_reflash.value = 1 Then
Call para_reflash
For i = 0 To 72
S_Axispara(i).Text = Str(d_AxisPara(i))
Next
Else
For i = 0 To 72
S_Axispara(i).Text = "*"
Next
End If
End Sub
Private Sub S_Axispara_Click(Index As Integer) '准备改参数时停止刷新
S_reflash.value = 0
End Sub
(四)编译运行演示
1.EtherCAT连接
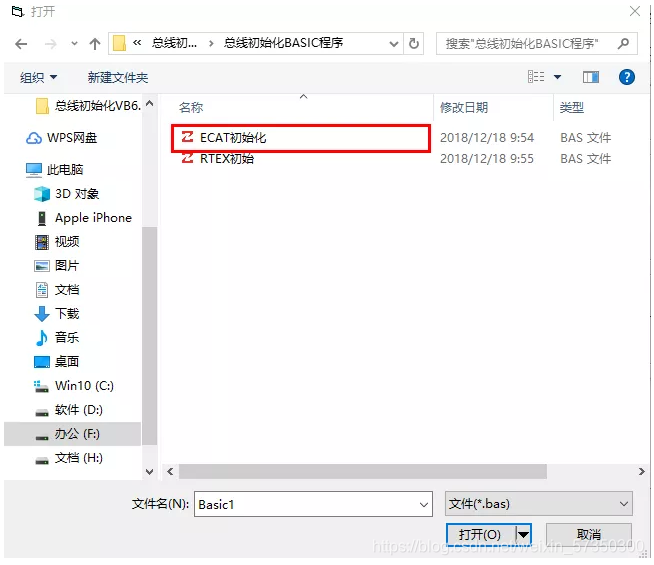
连接控制器后点击“下载BAS文件到ROW”按钮,打开对应文件夹,选择“ECAT初始化”文件。
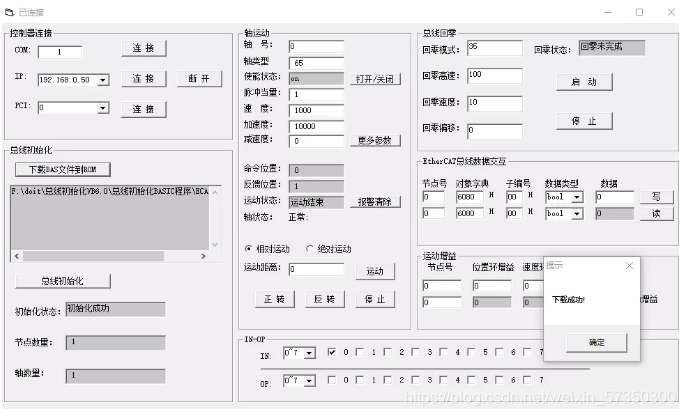
通过轴数量和节点数量可以看出,以及检测到驱动器并连接成功,接下来通过控制运动现象来确认驱动器受控制。
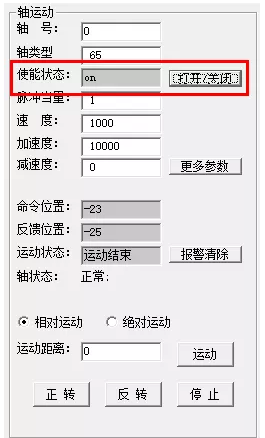
2.测试使能
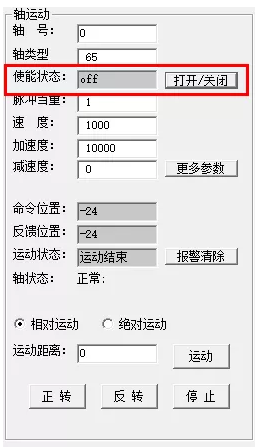
使能状态off
使能状态on
轴使能正常。
3.运动测试
通过ZDevelop软件连接对应控制器时,可以通过“视图”→“示波器”调出示波器观察。
正反转运动:
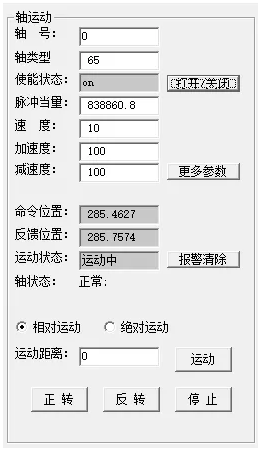

定点运动:

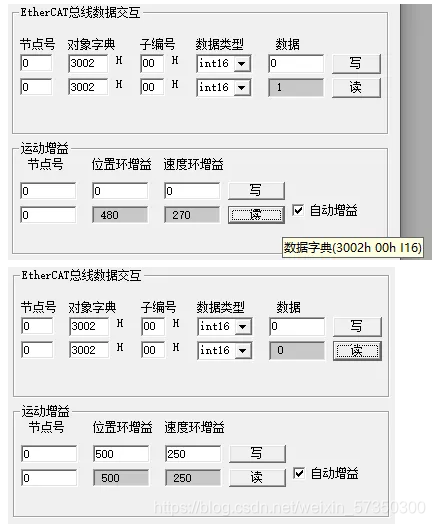
4.数字字典测试
在EtherCAT通讯中,数据字典3002h-00h表示运动控制中位置环增益和速度环增益是否自动改变。1-自动,0-手动。
本次,正运动技术的应用开发之VB6.0就分享到这里,更多精彩内容请关注“正运动小助手”公众号。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师:400-089-8936。
本文由正运动小助手原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。



















 1512
1512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











