









首先此文章当是自我记录、总结,也供各位参考,本人学习编程时间不长,若此文章出现错误,欢迎指证。
一、首先从开始任务开始着手

这里面有陀螺仪姿态解算、底盘、云台、裁判系统以及任务系统时间统计共5个任务,本代码只实现哨兵的基本运动主要是底盘以及云台任务。
二、地盘任务,底盘比较简易,只需控制两个3508即可,先从底盘开始。
#include "chassis_task.h"
#include "gimbal_task.h"
#include "FreeRTOS.h"
#include "pid.h"
#include "task.h"
#include "communicate.h"
#include "detect_task.h"
#include "arm_math.h"
Chassis_Data Chassis_data;
/************* ↓ 初始化底盘 ↓ *************************/
static void Chassis_Init(Chassis_Data * chassis_data)
{
PID_data pidinit;
chassis_data = &Chassis_data;
chassis_data->RB = GetM3508DataPointer() + 2;
chassis_data->LB = GetM3508DataPointer() + 3;
CAN2_Send_Message(45);
pidinit.pid.Kp=M3508_PID_p; //PID初始化,M3508_PID_p 2.5
pidinit.pid.Ki=M3508_PID_i; // 0.05
pidinit.pid.Kd=M3508_PID_d; // 0.5
pidinit.Limiting=M3508_Limiting; //电机输出限幅
pidinit.Reduction_ratio=M3508_Reduction_ratio;// 0
PID_Init2(&(PID_Datas.LB),&pidinit);
PID_Init2(&(PID_Datas.RB),&pidinit);
chassis_data->max_speed=MAX_SPEED; //哨兵移动速度最大值 2500
chassis_data->mid_speed=MID_SPEED; //1000
chassis_data->chassis_mode=chassis_stop; //初始化模式为停止模式
chassis_data->loop_time=set_loop_time; //循环时间 5000
chassis_data->loop_time_counter=0.5*set_loop_time;
chassis_data->loop_speed=set_loop_speed; //循环速度 100
}
/*地盘控制任务*/
void chassis_task(void *pvParameters)
{
//空闲一段时间
vTaskDelay(CHASSIS_TASK_INIT_TIME);
RC_TypeDef *RC_typeDef;
RC_typeDef = GetRemoteControlPointer(); //遥控器
Chassis_Init(&Chassis_data); //底盘初始化
while(1)
{
Chassis_Mode(&Chassis_data);
setM3508Speed(0, //can通信发送四个速度数据
0,
Chassis_data.set_M3508_value[2],
Chassis_data.set_M3508_value[3]);
vTaskDelay(CHASSIS_TASK_TIME);
}
}
/*模式设置*/
static void Chassis_Mode(Chassis_Data * chassis_data)
{
switch(chassis_data->chassis_mode){
case chassis_stop: //0
Chassis_stop_mode(chassis_data);
break;
case chassis_loop: //1
Chassis_Loop_mode(chassis_data);
break;
}
}
void Chassis_stop_mode(Chassis_Data * chassis_data){ //停止模式,两速度为0(哨兵移动只用到两个3508)
chassis_data->set_M3508_value[2]=0;
chassis_data->set_M3508_value[3]=0;
}
/*************↓ 地盘运动逻辑 ↓****************/
/**运动周期loop_time,counter用于计数,在计数到
loop_time时转换方向(dir)********************/
void Chassis_Loop_mode(Chassis_Data * chassis_data)
{
if(chassis_data->loop_time_counter<chassis_data->loop_time)
{
if(chassis_data->loop_dir==0) //方向0
{chassis_data->set_M3508_value[2]=chassis_data->loop_speed;
chassis_data->set_M3508_value[3]=chassis_data->loop_speed;
}else
{ //方向1 0的反方向
chassis_data->set_M3508_value[2]=-chassis_data->loop_speed;
chassis_data->set_M3508_value[3]=-chassis_data->loop_speed;
}
chassis_data->loop_time_counter++;
}
else //方向转换,重置计数
{
if(chassis_data->loop_dir==1)
{
chassis_data->loop_dir=0;
}else{
chassis_data->loop_dir=1;
}
chassis_data->loop_time_counter=0;
}
}
u8 setM3508Speed(int speed1,int speed2,int speed3,int speed4)
{
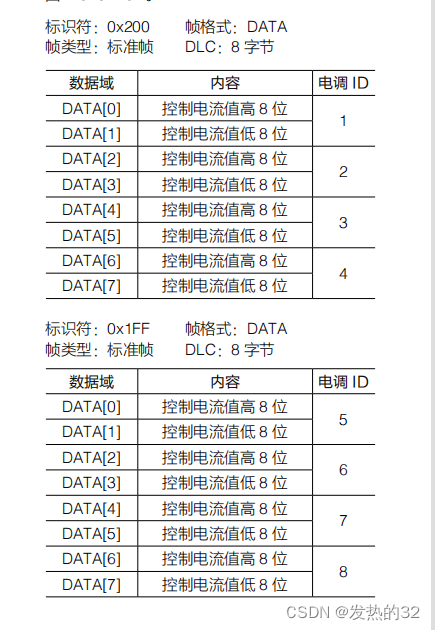
CAN_Send_Msg( //四个位置,相应位置对应相应ID发送的数据 can通信参考官方电调使用说明中的协议,此文章中下面已上传
CAN2,
0,
0,
PIDApplyToM3508Speed(RB_ID,speed3), //输出LF_ID经过PID计算的输出值
PIDApplyToM3508Speed(LB_ID,speed4),
0X200
);
}
int PIDApplyToM3508Speed(u16 ID,int Speed) //返回四个轮子输出值
{
PID_DATAS *pid;
pid=&PID_Datas;
Chassis_Data *data;
data=&Chassis_data;
Global_Data *global_data;
global_data = &Global_data;
switch(ID)
{
case LB_ID:
return (short)PID_CTRL(Speed,data->LB->rpm_speed,&(pid->LB));//PID计算式,PID在此计算,返回输出值
case RB_ID:
return (short)PID_CTRL(Speed,data->RB->rpm_speed,&(pid->RB));
}
return 0;
}
底盘任务需仔细看官方的c6020电调can通信协议来正确通信,下面直接附两张通信协议图片就可不用去找了

三、云台任务
云台任务比较复杂,PITCH和YWA轴(两个6020),需要控制射击(两个3508)摩擦轮,一个拨盘用于拨弹(2006电机),视觉传回信息处理等等。下面逐一展开
/*云台任务*/
void gimbal_task(void *pvParameters)
{
int16_t shoot_out = 0;
vTaskDelay(GIMBAL_TASK_INIT_TIME);
Gimbal_Init(&Global_data);
while(1)
{
Gimbal_Mode(&Global_data); //云台模式
shoot_out = Shoot_Task(); //射击任务
setFRICData(Global_data.FRIC_speed);
vTaskDelay(GIMBAL_CONTROL_TIME);
}
}目前云台写了三个模式,分别是锁定模式,云台巡逻模式以及云台跟随模式。
云台跟随模式(视觉通信)
u8 global_follow_mode(int error_p_angle,int error_y_angle)
{
Vision_InitTypeDef *vision;
vision = &Vision; //取地址才能取出其中的值
Global_Data *global_data;
global_data = &Global_data;
/************* ↓ 跟随 ↓ ********************/
if(vision->yaw.data+Inital_YAW_angle>360)
global_data->yaw_angle=vision->yaw.data+Inital_YAW_angle-360;
else if(vision->yaw.data+Inital_YAW_angle<0)
global_data->yaw_angle=360+vision->yaw.data+Inital_YAW_angle;
else
global_data->yaw_angle=vision->yaw.data+Inital_YAW_angle;
if((-vision->pitch.data)+Inital_PITCH_angle>360)
global_data->pitch_angle=(-vision->pitch.data)+Inital_PITCH_angle-360;
else if((-vision->pitch.data)+Inital_PITCH_angle<0)
global_data->pitch_angle=360+(-vision->pitch.data)+Inital_YAW_angle;
else
global_data->pitch_angle=(-vision->pitch.data)+Inital_PITCH_angle;
global_data->pitch_angle=global_data->pitch_angle;
global_data->yaw_angle=global_data->yaw_angle;
vTaskDelay(5);
/************* ↓ 限幅 ↓ ********************/
if(global_data->pitch_angle>M6020_MAX2*0.043945){ //角度转换 360/8191(6020编码器最.大值)=0.043945(约等于)
global_data->pitch_angle=M6020_MAX2*0.043945;
}else if(global_data->pitch_angle<M6020_MIN2*0.043945){
global_data->pitch_angle=M6020_MIN2*0.043945;
}
if(global_data->yaw_angle>M6020_MAX*0.043945){
global_data->yaw_angle=M6020_MAX*0.043945;
}else if(global_data->yaw_angle<M6020_MIN*0.043945){
global_data->yaw_angle=M6020_MIN*0.043945;
}
setGlobalData(global_data->yaw_angle,global_data->pitch_angle,0,0);
}(主要控制代码是global_data->yaw_angle=vision->yaw.data+Inital_YAW_angle;)
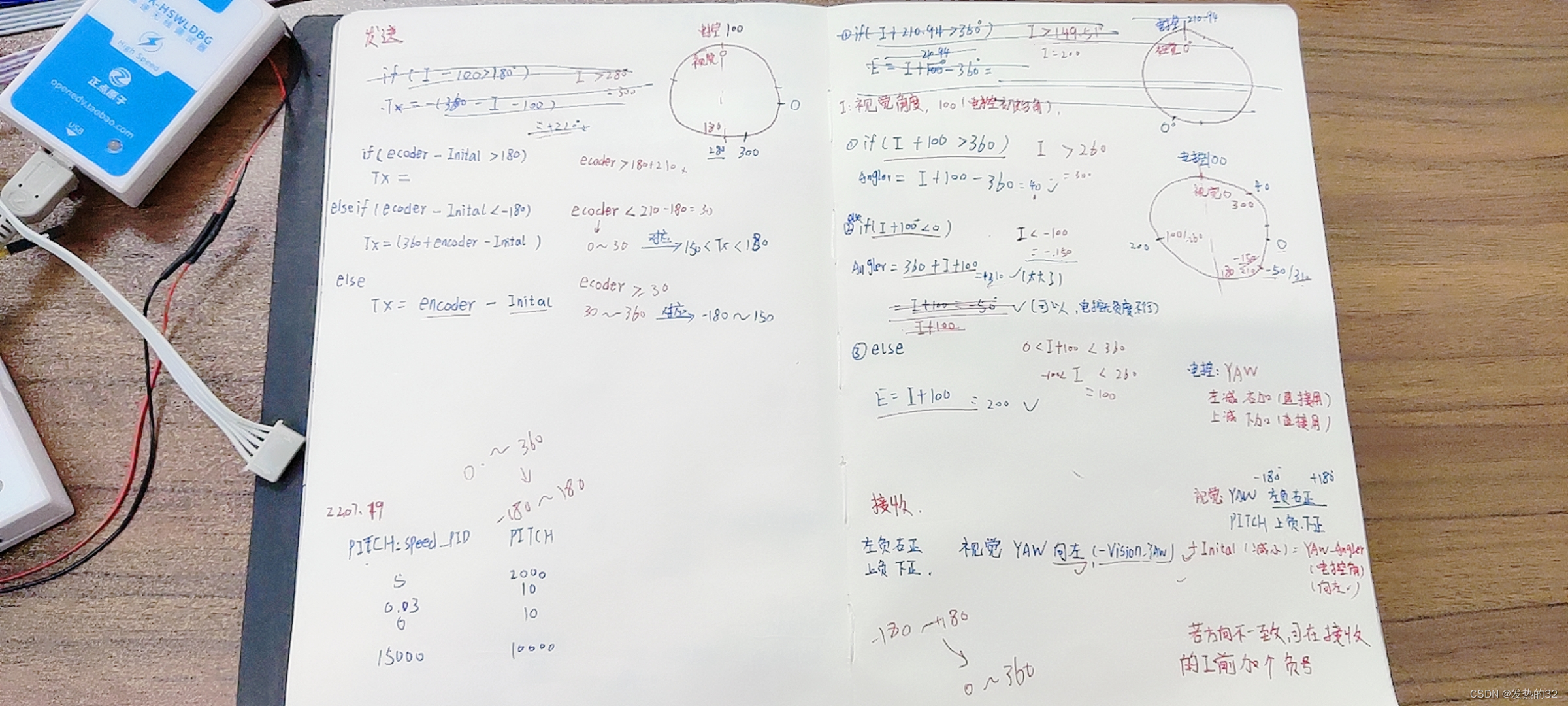
此跟随模式难点一在与与视觉信息传输与处理,因为视觉要求PITCH,YAW初始角度为0,但电机的角度很难为0(角度=编码器值*0.043945),故我们发给视觉的角度是要减去初始角度的(如下),所以视觉传回来的角度也应加回初始角度才适应我们的6020电机。难点二是角度转换,视觉角度是180°-负180°,而电机编码器是0-360度,故需要角度转换。
发送视觉数据(主要是发送代码是 Vision_Tx.yaw.data= Vision_Tx.pitch.data=)
if(global_data->global_mode == global_follow)
{
if(global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle>180)
Vision_Tx.yaw.data=-(360-global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle);
else if(global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle<-180)
Vision_Tx.yaw.data=(360+global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle);
else{
Vision_Tx.yaw.data=global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle;
}
}
else
{
if(global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle>180)
Vision_Tx.yaw.data=-(360-global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle);
else if(global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle<-180)
Vision_Tx.yaw.data=(360+global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle);
else{
Vision_Tx.yaw.data=global_data->m6020[0]->encoder*0.043945-Inital_YAW_angle;
}
}
Vision_Tx.pitch.data =-(global_data->m6020[1]->encoder*0.043945-Inital_PITCH_angle);电控与视觉转换原理(自己的笔记不多赘述),左边电控发送角度给视觉,右边电控接收数据
巡逻模式和锁定模式较简易,可直接从下面链接看代码,在此及不多费章节讲解。
射击也大有篇幅,实现大概作用是视觉一旦识别到有敌对车辆云台就进入跟随模式,摩擦轮打开,拨盘打开,开始射击
if(vision->dis.data==0) //RC.rc.s[0]==3||RC.rc.s[0]==0
{
shoot->shoot_fric_mode=FRIC_SPEED_OFF; //间接()
shoot->shoot_mode=SHOOT_MODE_OFF; //直接(摩擦轮动)
shoot->single_shot_time=0;
} //√
else if(vision->dis.data!=0)
{
shoot->shoot_fric_mode=FRIC_SPEED_ON; // 1 开
shoot->shoot_mode=SHOOT_MODE_FRIC_WHEEL; // √
shoot->single_shot_time++;
} 详细代码在以下链接
最后附上视频链接,哨兵实现的基本功能
视频链接:https://pan.baidu.com/s/1wWpqJfF_l26m6uO6MpnzcQ
提取码:1111
此源码链接:https://pan.baidu.com/s/1sXTnh2KtHmdZGkttjcu7cw
提取码:1111
















 2672
2672











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











