






 本文深入探讨了TPS控制在DAB应用中的重要作用及其多样化控制方式。通过对不同划分方式的比较,解析了其在控制策略上的差异,并介绍了仿真电路的具体实现方法。
本文深入探讨了TPS控制在DAB应用中的重要作用及其多样化控制方式。通过对不同划分方式的比较,解析了其在控制策略上的差异,并介绍了仿真电路的具体实现方法。
TPS实际上是现在DAB控制中相当重要的一环,多种多样的控制方式使TPS与其它控制方式有着显著的不同。实际上之前的SPS、DPS、EPS都是TPS中的一种特殊情况。
死区的事情我后面会单独说,实际上就是死区最短时间的计算,放这里就显得太多了。
随着自由度的增加,可以实现的控制方式却是呈现着指数状态的上升,TPS多样化的控制、多样化的划分方式决定了它在创新点方向有着很大的可写性。
两个小讨论点,有懂的大哥还是希望给我留下言帮我解决下:
- 控制方式问题:我还记得开始学习时候,虽然文字表达不同,但DPS、EPS的控制方式的核心内容是一致的,电流应力优化跟回流应力优化出来的控制方式完全一致。但TPS有点意思,不同的划分方式带来的控制策略不同,优化出来的控制方式也会有些许不同。这里我并不确定控制方式是否会一致,我深入看过的几篇文献里面虽然划分方式不同,有的9种有的12种,但是这两种方式是有重叠情况的,惊讶的是重叠情况下的电流应力优化的控制方式竟然不一样。我并没有去验证,但是我后面给出的是可以实现控制的,而且P*、K什么的也是对应的上的。
- 闭环问题:我在TPS学习时候有这么一个问题,要不要使用PI闭环控制,跟其它控制方式D2采用PI自由跑不一样,TPS的三个自由度D1、D2、D3都可以用传输功率标幺值P*跟电压变比K来表示,但是我不知道该怎么增加抗干扰环节,我之前尝试着三个都通过P*、K来进行设定,P*、K通过输出电压、输出电流采样来进行反馈但是控不住。
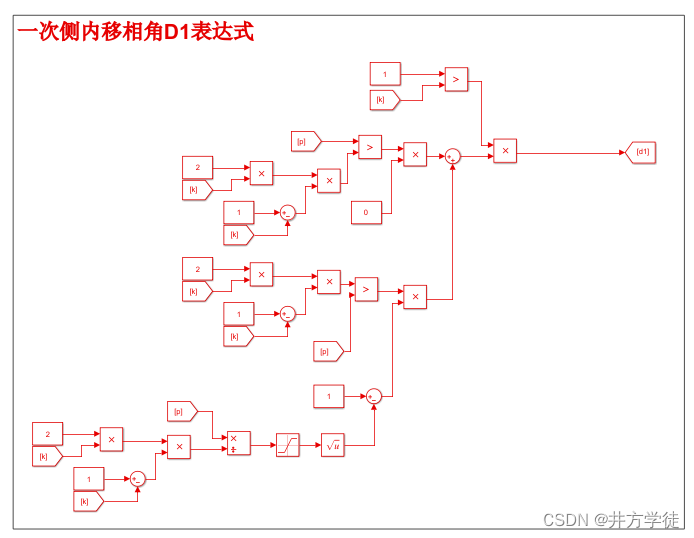
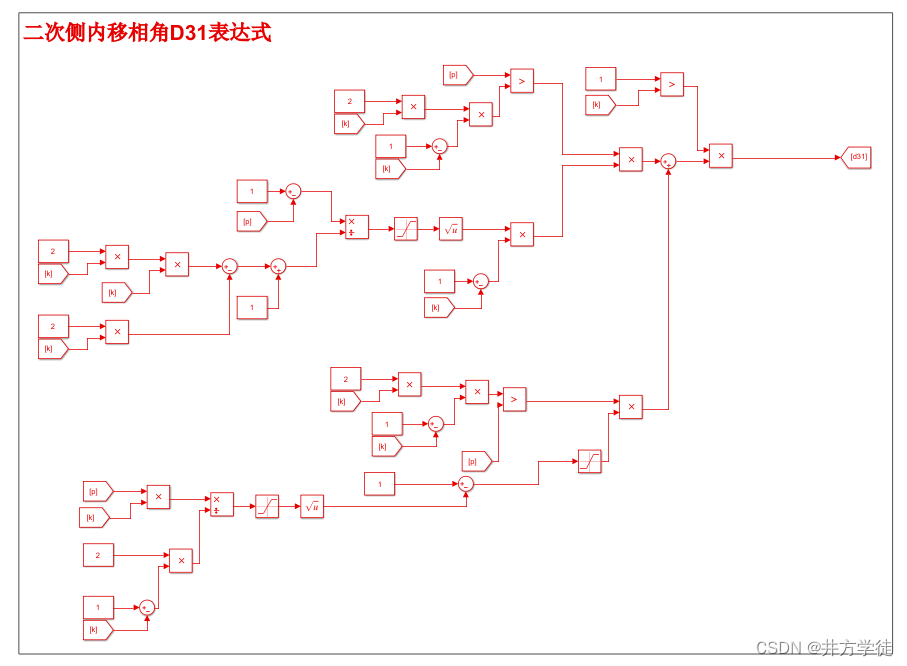
接下来我给大家介绍的TPS控制方式里面,D2跟之前一样是PI闭环控制,D1、D3都是跟P*和K挂钩的表达式,D1、D3在仿真搭建中是通过各种逻辑门、加减乘除来实现控制的。在实际DAB电路搭建中,只要在烧入程序中设置好表达式就行。
话不多说,先上仿真电路图、逻辑控制图再解释。
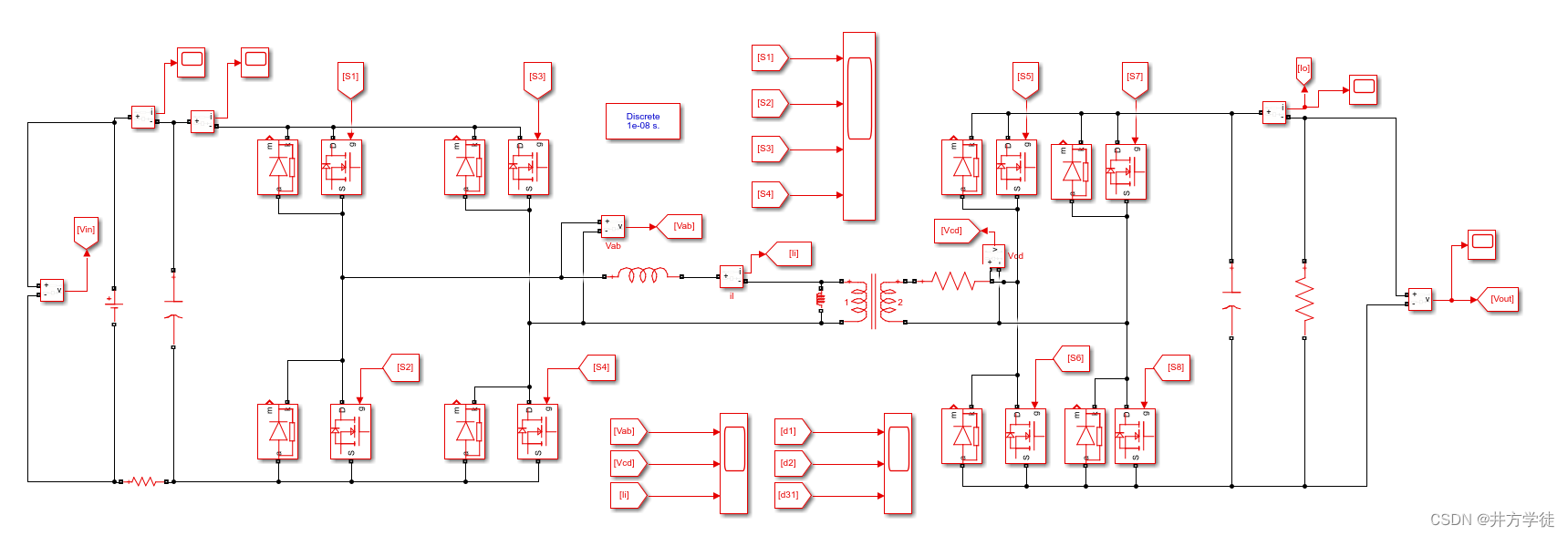
仿真电路图跟之前相比没有太大变化,就多了控制角,跟输出电流采样,其它的没变化。
逻辑控制图包括一下几部分:D1、D2、D3,驱动,P*和K。
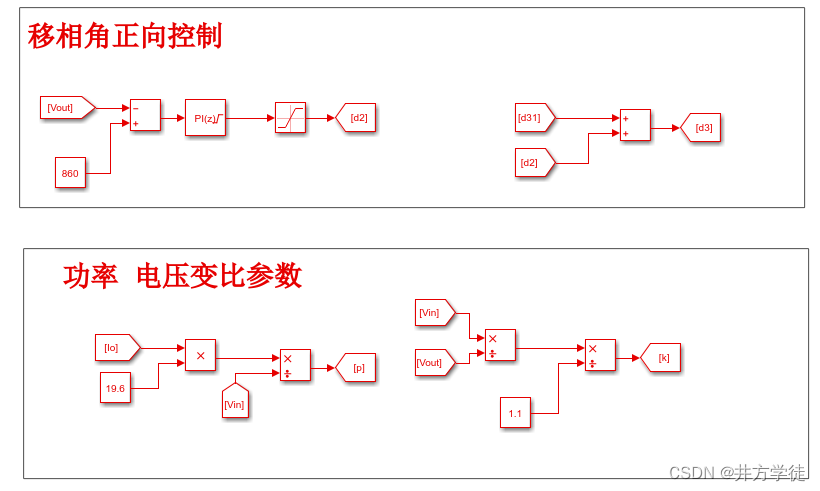
这个D31实际上指的是S5、S8之间的相角差,加上D2之后就是S8、S1之间的相角差了,这里我都是以S1为基准来进行设置的。
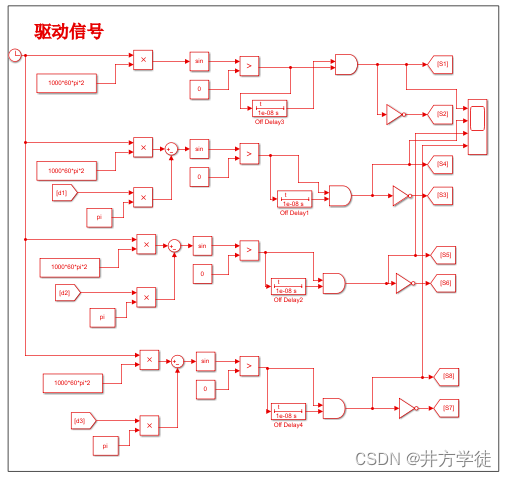
这里实际上很简单的控制,有的哥们觉的麻烦,Simulink里面PWM输出很简单就可以实现,但是我之所以这样设置,是因为这样搭建仿真电路的话在PSIM中也是可以用的,不管是交钱的新版的可以跑实际元件的还是老版的都可以我这个是9.1.3的5块钱淘宝买的,但是别太老,太老的PSIM版本不能使用太多元件,它保存不下来。
这个死区也就是里面的延时模块我觉得还是要有的,尽可能的贴近一点实际情况嘛。
大家一定要注意,这个控制方式的前提是K< 1,也就是Boost模式。
下面就是关于控制方式的讲解了。
我倾向于的控制方式是分为12种,DAB大家要明白功率是可以正向传输也可以反向传输的。因此仅以正向传输分析就是6种,下面给大家介绍下。
分析前提:
Vab和Vcd是两个分开的波形,是分开进行分析的,这是因为,Vab的波形我们是通过一次侧的内移相角D1来实现的,Vcd是通过外移相角D2、二次侧内移相角D3来实现的。如果把这三个移相比作为变量来看的话,Vab和Vcd是互不相关的,也就根据相关的大小关系构成了边界条件。
首先,Vcd也就是二次侧的波形我们是分为四种情况。由于外移相角的存在,Vcd的数值变化是如下的四种情况,也可以用图表示:
- 0——负——0——正
- 负——0——正——0
- 0——正——0——负
- 正——0——负——0
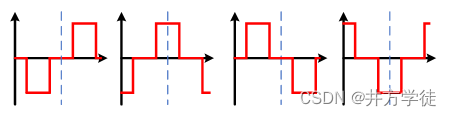
中间的虚线也就是半周期分界线,Vcd的四种输出波形如上所示。
有的人可能会有疑问,那为什么它的正负波形的占空比是这样,为什么不能变宽或者变窄,宽窄会不会影响情况的划分呢?实际上这些都是可变的,只是宽窄的情况是相对于Vab来说的,在给出Vab的情况之后,D1和D2、D3不是构成了边界条件嘛,在边界条件内Vab也好,Vcd也好,它的宽窄变化无所谓,不会变成其它情况,除非突破了边界条件。
上面Vcd的波形起始点都是以D1=0,Vab为正时刻开始进行的。
Vab对应的有三种情况,分别是:
- D1很小,Vab很宽,“覆盖”了Vcd。
- D1变大了,Vab跟Vcd出现了交叉。
- D1特别大,Vab被Vcd“覆盖”了。
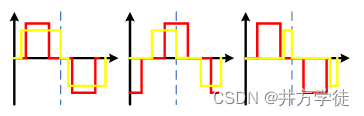
描述有点问题,但波形差不多就这样。
这样的话3种Vac、4种Vcd,这样就构成了12种工况。
这里主要想着就是介绍介绍,每种情况对应的边界条件啊,传输功率啊,各阶段电流啊啥的,大家自己求把,我就不写了,太多公式了。
直接给大家一个现成的,就是正向6种工况里面按电流应力最优进行调制的话只有两种情况,图省事直接用就行,如果真的想学的话我还是推荐大家去看文献,
K=V1/nV2,P*的基准值是SPS传输的最大功率。
四种情况:
K<1,P*<2k(1-k): K<1,2k(1-k)<P*<1:

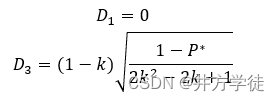
K>1,P*<2(k-1)/(k*k): K>1,2(k-1)/(k*k)<P*<1:
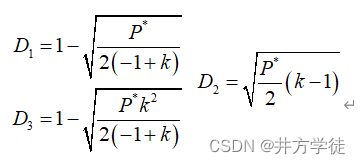
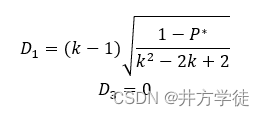
上面有一些D2的公式,那个是推出来的,实际上PI自己跑数据误差是不大的,但是如果按照公式给D2的话,控不住,D2就让PI自己跑得了。

















 5231
5231

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









