







一、动作指令
使机械手动作的指令叫作动作指令。
可分为:PTP动作指令,CP动作指令,Curves动作指令,Joint动作指令。
注意:
* CP模式,即Continuous Path 连续路径模式。
* 指定PTP动作指令和Joint动作指令的速度和加/减速度时,使用SPEED指令和ACCEL指令。指定CP模式动作指令时, 使用速度SPEEDS指令和加减速度ACCELS指令。
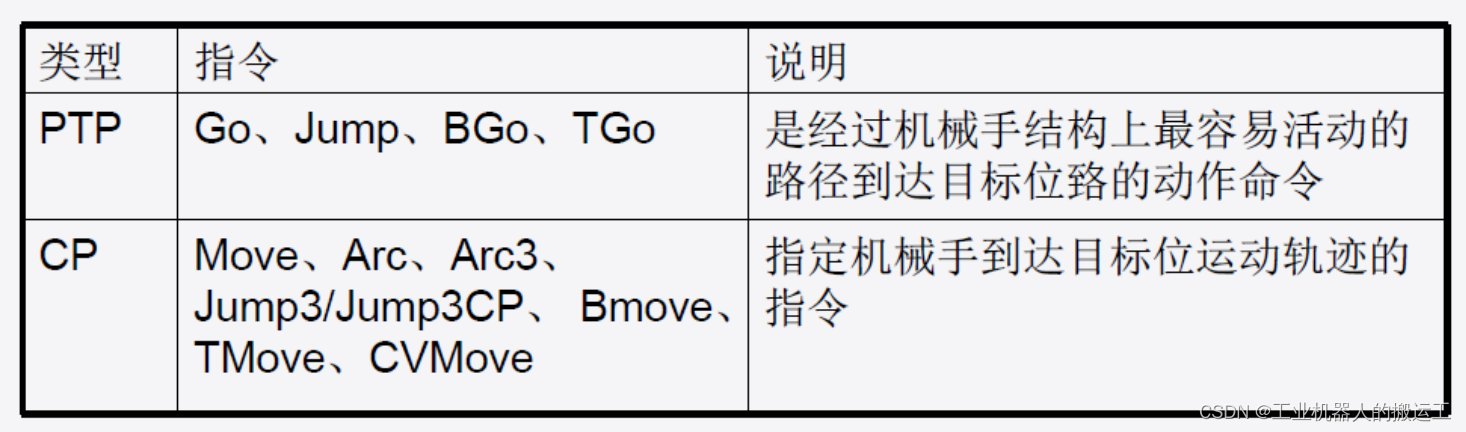
1、PTP动作指令
包括指令:Go、Jump、BGo、TGo
PTP(Pose To Pose)动作,是与其动作轨迹无关,以机械手的工具顶端为目标位臵使其动作的动作方法。PTP动作, 使用各关节上配置的电动机,使机械手通过最短的路径到达目标位置。
优点:运动速度快;
缺点:运动轨迹无法预测。指定PTP动作速度和加/减速,使用SPEED指令和ACCEL指令。
1.1、Go 指令
功能: 用于在当前位置到指定位置之间以PTP 动作移动机械臂。
格式:Go 目标坐标
示例:
1. Go P1 ´机械手动作到P1点
2. Go XY(50, 400, 0, 0) ´机械手动作到X=50,Y=400,Z=0,U=0 ’此坐标为世界坐标,单位:mm
3. Go P1+X(50) ´机械手动作到P1点X坐标值偏移量为+50的位置
4. Go P1:X(50) ´机械手动作到P1点对应X坐标值为50的位置
如下所示为利用命令窗口的操作示例。
>Go Here +X(50) '从当前位置向X 方向移动50mm
>Go P1 '向P1 移动
>Go P1 :U(30) '向P1 且U=30 的位置移动
>Go P1 /L '以左夹具末端姿势向P1 移动
>Go XY(50, 450, 0, 30) '向X=50、Y=450、Z=0、U=30 的位置移动
Go 与Move 的差异
Move 和 Go 都是使机器人机械臂动作的命令。两者之间的最大不同是Go 是进行PTP 动作,而Move是在直线轨道上
移动机械臂。在重视到达目标点时的机械臂的姿势时,使用Go 命令;而更重视控制动作中的机械臂的轨迹时,使 用Move 命令。
Go 与Jump 的差异
Jump 和 Go 都是以PTP 动作移动机器人机械臂的命令。但是,Jump 拥有一个Go 所没有的功能。Jump 首先将机器 人的夹具末端抬起到LimZ 值,然后水平移动机械臂,在达到目标坐标的上空时开始下降动作。这种移动的优点是 可以切实地避开障碍物,更重要的是通过吸附和配置动作可以提高作业的循环时间。
1.2、Jump 指令(不能用于6轴机器人)
功能: 用于通过门控运动(首先垂直上升,然后水平移动,最后垂直下降的门型动作)使机械臂从当前位置向指 定位置进行PTP 动作。
格式:Jump 目标坐标
说明
Jump 命令用于通过所谓的 “Arch 运动(Arch 型动作)” 将机械臂从当前位置移动到目标坐标。也就是说,可 考虑为1 次可进行3 个动作的语句。比如,如果定义Arch 编号,1 次Jump 命令则进行下述3 个动作。
1) 首先,仅第3 关节动作到Jump 命令期间的由Arch 编号计算的Z 轴高度位置。
2) 其次,机械臂在到达由LimZ 指定的Z 限制位置之前,向Z 轴方向上升,同时水平移动到目标坐标。然后,分别 进行第1 关节、第2 关节、第4 关节的动作,同时开始向Z 轴方向下降。机械臂一直进行动作,直至获取最终的X、 Y、U 坐标位置。
3) 机械臂仅向Z 轴方向移动,直至获取目标Z 坐标位置,在获取目标坐标时,Jump 命令结束。由于不能在Jump 命 令中指定目标坐标(移动的目的位置),因此,执行Jump 命令之前,需要进行示教。利用Accel 进行Jump 移动的加速和减速。另外,利用Speed 控制移动速度。
关于CP
如果附加了CP 参数,则可在开始动作减速时叠加后续动作命令的加速。此时,不对目标坐标进行定位。
关于Arch 编号
可利用Jump 命令中指定的Arch 编号变更Jump 的Arch 类型。这样的话,可在第1 关节、第2 关节、第4 关节等各 关节动作之前,确定要向Z 轴方向移动多少程度。Jump 命令中可有效使用的Arch 编号为C0~C7 之间的值。用户 可利用Arch 命令来定义Arch 表格值相对于C0~C6 之间值的设置。但C7 始终定义“
门控运动
”
。
“
门控运动
”
是指机 器人在移动第1 关节、第2 关节、第4 关节等各关节之前,首先仅将第3 关节移动到由LimZ 定义的坐标位置处。 进行这种“
门控运动
”
时,首先移动到由LimZ 定义的Z 限制值位置,然后,开始第1 关节、第2 关节、第4 关节等各 关节动作。第1关节、第2 关节、第4 关节等各关节移动到各自的最终目标坐标位置之后,第3 关节朝向由目标坐 标定义的最终Z 坐标位置进行下降动作。下图所示为“门控运动”的动作。
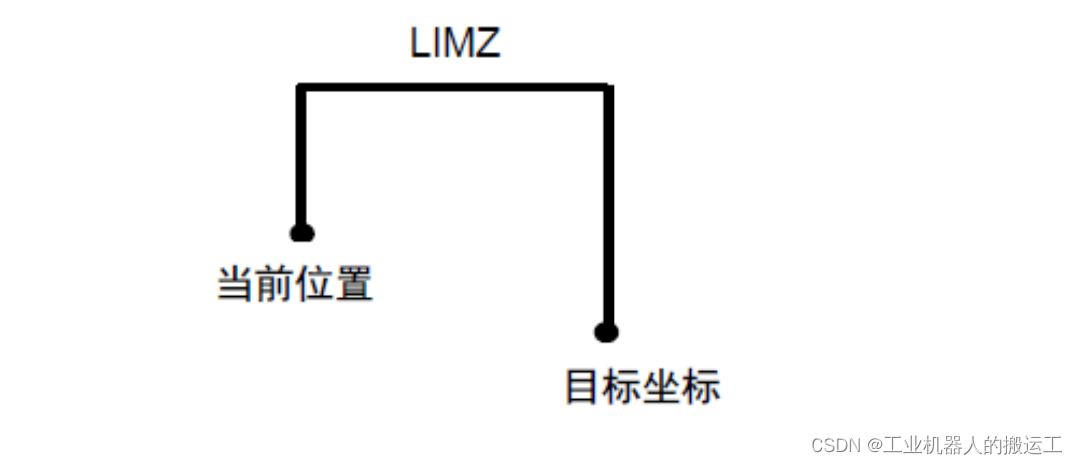
关于
LimZ
LimZ Z
坐标值指定当前设置的本地坐标系水平移动面上的
Z
坐标最高值。根据指定的
Arch
设置,达到
LimZ
值之 前,也许第1
关节、第
2
关节、第
4
关节等各关节已开始动作,但
LimZ
值始终用于定义该移动的
Z
坐标方向的上 限值。如果省略LimZ
参数,则适用此前(最后)由
LimZ
指定的最高值。
由
LimZ
指定的高度方向限制值为本地机器人坐标系上的
Z
坐标值。并不是
Arm
、
Tool
坐标的
Z
坐标值。因此,使 用作业高度不同的工具或夹具末端时,请充分注意并采取必要的措施。
Jump
与
Jump3
及
Jump3CP
的差异
可在垂直6 轴型机器人中使用Jump3 和Jump3CP,但不能使用Jump。在水平多关节型机器人(包括RS 系列)上向Z 轴 方向进行上升/下降动作时,使用Jump 可缩短动作时间。也可以在Z 轴以外的方向进行Jump3 的接近/转移动作。
Jump
与
Go
的差异
Jump 与Go 的最大差异在于:Go 时,所有关节动作同步,各关节同时开始动作并同时停止。而Jump时,动作的开 始和结束仅限于垂直方向第3 关节。进行类似装置的吸附和配置等作业时,简易使用该命令。
Jump
的减速停止
使用Jump 时,机械臂必须在减速的同时,停在目标坐标位置上。
Jump
的适当速度和加速指示
分别利用Speed 和Accel 设置Jump 动作时的机器人速度和加减速。仅可在要利用Jump、Go 等进行点到点的动作时 设置Speed 和Accel 命令,这点敬请注意。比如,要执行类似Move 或Arc 等进行直线和圆弧插补动作的命令时, 请使用SpeedS 或AccelS 命令。另外,Jump 时,可分别针对第3 关节的上升移动、第4 关节的水平移动(包括旋转)以及第3 关节的下降等设置速度和加减速。
Jump
的
Pass
功能
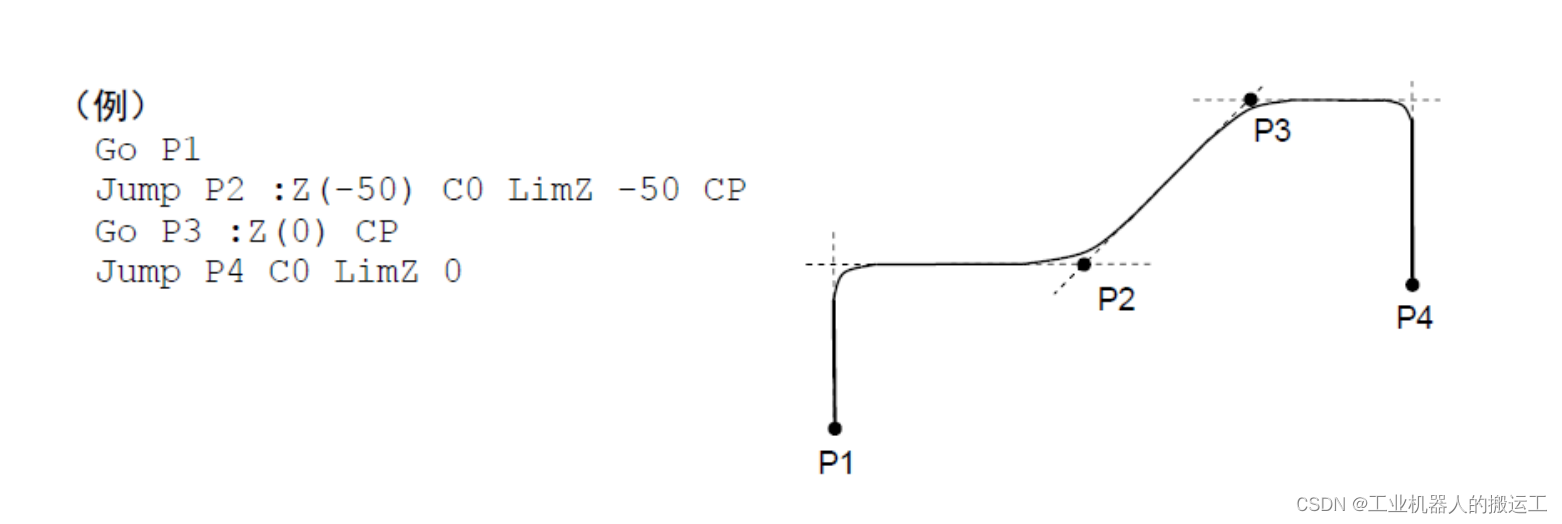
在下降动作量为0 的Jump 上附加CP 参数时,由于该Jump 的水平动作不减速停止,因此,可平滑地连接后续的PTP 动作。
另外,在此前的PTP 动作命令上附加CP 参数时,由于上升动作量为0 的Jump 的PTP 动作不减速停止,因此,可平 滑地连接Jump 的水平动作。
这在希望将通常的Jump 水平动作(1 个PTP 动作)切换为平滑连接几个PTP 动作时非常便利。
使用Arch 时的重要事项
由于Arch 运动是通过轨迹控制来合成第3 关节的上升或下降动作以及横向动作,因此,并不能保证实际的轨迹。 其轨迹会因动作速度或机械臂的移动方式而异。请通过作业使用的实际速度和姿势确认实际轨迹。
・
即使在相同位置上执行带有相同C [Arch 编号] 的Jump 命令,低速时的轨迹也会低于高速动作时的轨迹。因此, 即使确认没有高速碰撞到障碍物,但低速动作时也可能会发生碰撞,敬请注意。
・
与低速动作时相比,会出现高速动作时垂直上升量增大、垂直下降量减小的倾向。没有达到期待的垂直下降距 离时,请降低速度或减速度,或将下降距离设置得长一些。
・
即使是相同距离的动作,轨迹也会因机械臂的移动方式而异。虽然因机械臂的移动方式而导致的轨迹变化多种 多样,但是,如果以一般的水平过关节型机器人为例,第1 机械臂的移动幅度越大,垂直上升量也越大,而垂直下 降量则越小。没有达到期待的垂直下降距离时,请降低速度或减速度,或将下降距离设置得长一些。
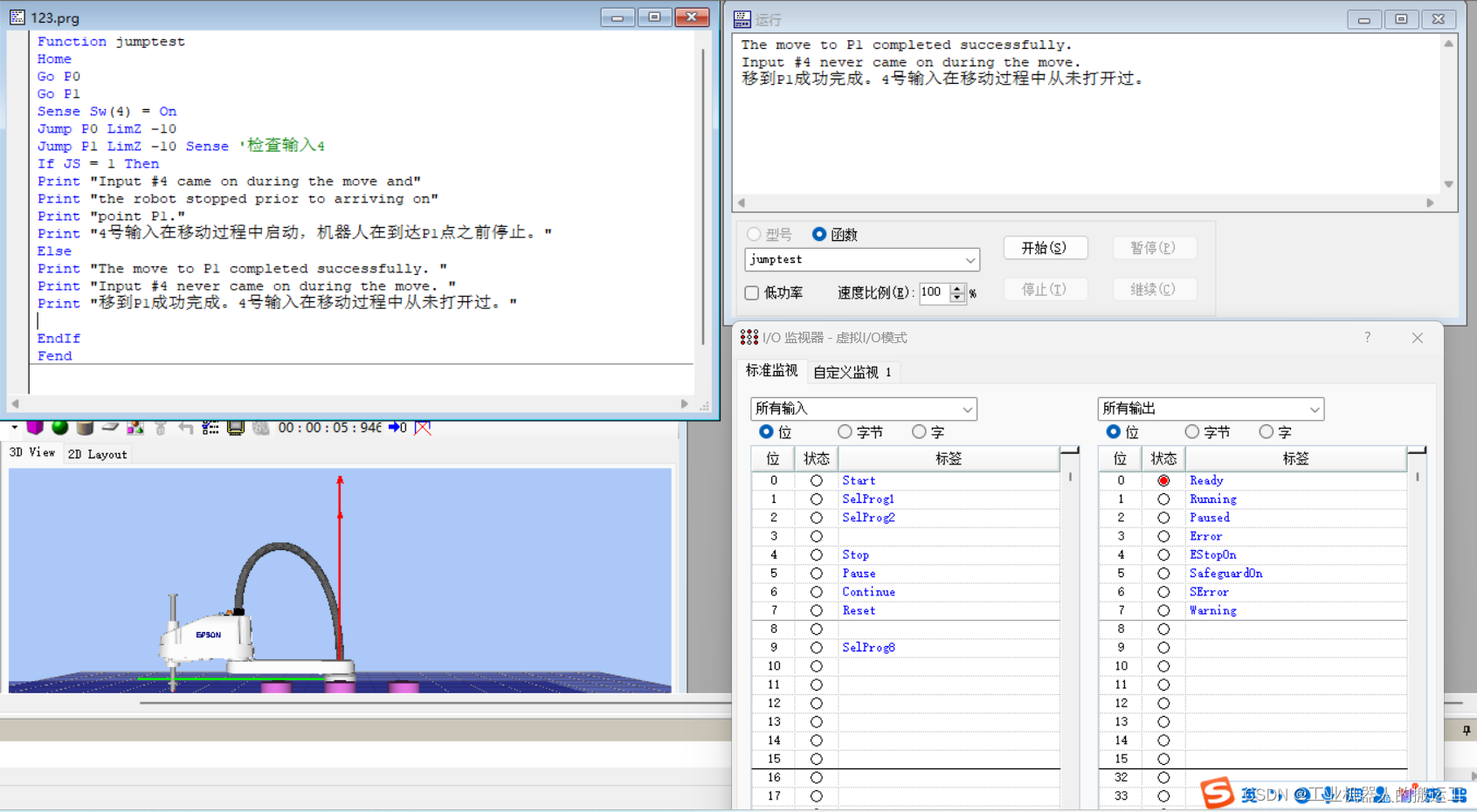
Jump
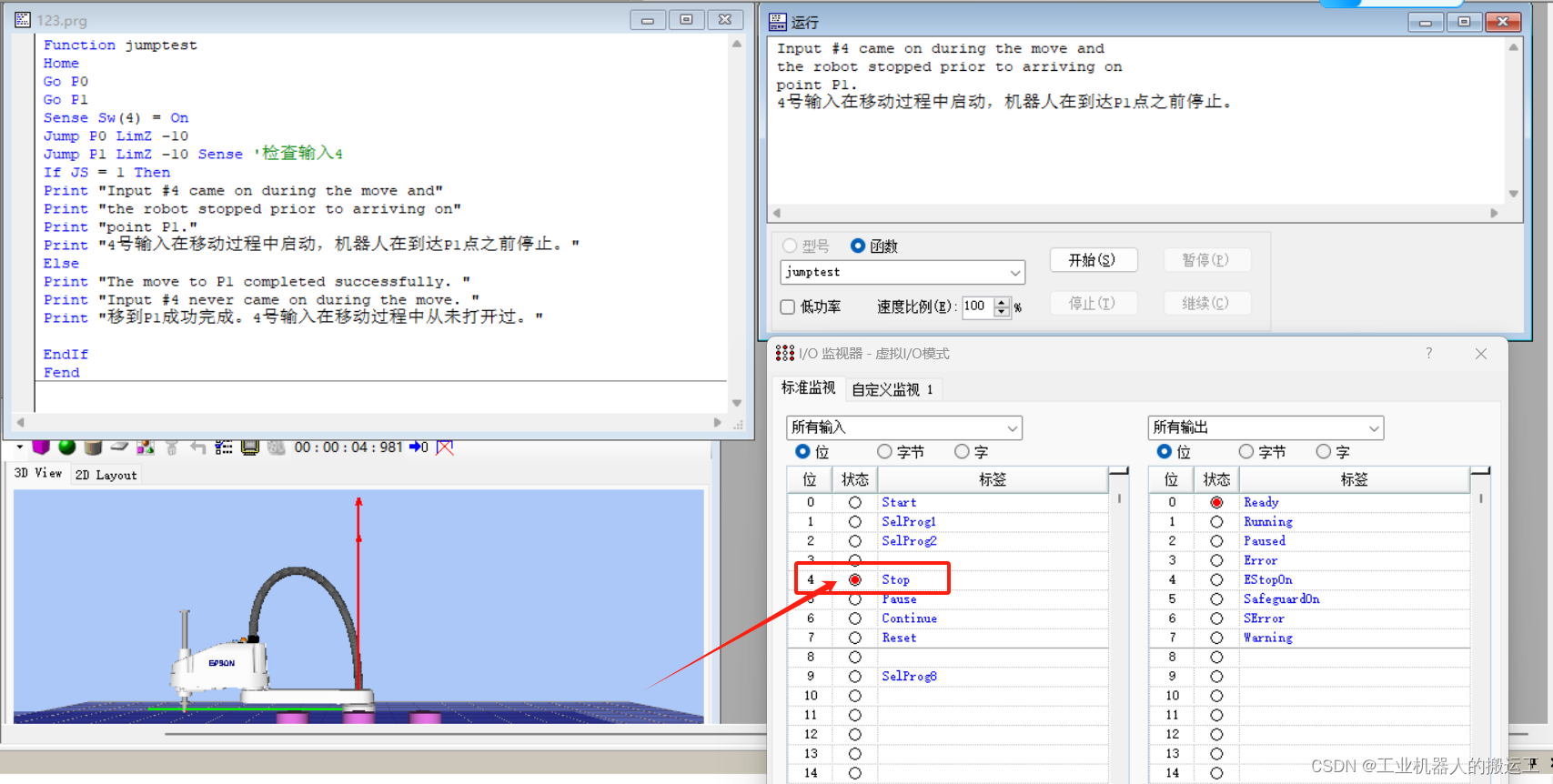
使用示例
下例所示为从点P0 到P1 进行单纯的PTP 动作后,利用Jump 返回到P0。在程序的后半段,机械臂执行Jump,如果 输入位4 未置为ON,则进行下降动作并移动到P1。输入位4 为ON 时,不进行下降动作。
演示
输入4信号时
>
Jump
P10+X50 C0 LimZ-20 Sense !D50;On 0;D80;On 1!
示例:
1. Jump P1 ´机械手以“门形动作”动作到P1点
2. Jump P1 LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点,如图1示
3. Jump P1:Z(-10)LimZ -10 ´以限定第三轴目标坐标Z=-10的门形动作移动到P1点位臵Z坐标值为-10的位置
1.3、BGo指令
解释:用于在已选择的本地坐标系上执行偏移PTP 动作。
格式:Bgo 目标坐标 [CP] [PerformMode 模式编号] [Till | Find] [!并行处理!] [SYNC]
说明
用于在已选择的本地坐标系上执行偏移PTP 动作。以由表示目标坐标的点数据指定的坐标系为基准,实施偏移PTP 动作。
未指定本地坐标系时,以本地0(基础坐标系)为基准,实施偏移PTP 动作。
无视由点数据提供的姿势标志并保持当前的姿势标志。但垂直6 轴型机器人情况下可自动变更姿势
标志,以减小关节移动量。
通过使用Till 修饰符,可在Till 条件成立时于动作中途对机器人进行减速停止,完成BGo 动作。
使用Find 修饰符并且动作期间Find 条件变为真时,将点数据保存到FindPos 中。
可使用!并行处理!,与动作并行执行其他处理。
如果附加了CP 参数,则可在开始动作减速时叠加后续动作命令的加速。此时,不对目标坐标进行定位。
如果在路径运动有效时设置了PerformMode 参数,则可叠加不同动作模式的减速动作和加速动作。
根据动作模式,可能无法叠加。
BGo
使用示例
>
BGo
XY(100, 0, 0, 0) '(在本地坐标系中)向X 方向移动100mm
Function BGoTest
Speed 50
Accel 50, 50
Power High
P1 = XY(300, 300, -20, 0)
P2 = XY(300, 300, -20, 0) /L
Local 1, XY(0, 0, 0, 45)
GoP1
Print Here
BGo XY(0, 50, 0, 0)
Print Here
Go P2
Print Here
BGo XY(0, 50, 0, 0)
Print Here
BGo XY(0, 50, 0, 0) /1
Print Here
Fend
[输出结果]
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0.000 W: 0.000 /R /0
X: 300.000 Y: 350.000 Z: -20.000 U: 0.000 V: 0.000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0.000 W: 0.000 /L /0
X: 300.000 Y: 350.000 Z: -20.000 U: 0.000 V: 0.000 W: 0.000 /L /0
X: 264.645 Y: 385.355 Z: -20.000 U: 0.000 V: 0.000 W: 0.000 /L /0
1.4、TGo指令
解释:用于在当前工具坐标系上执行偏移PTP 动作。
格式:TGo 目标坐标 [CP] [PerformMode 模式编号] [Till | Find] [!并行处理!] [SYNC]
说明
用于在当前工具坐标系上执行偏移PTP 动作。
无视由点数据提供的姿势标志并保持当前的姿势标志。但垂直6 轴型机器人情况下可自动变更姿势标志,以减小关 节移动量。
通过使用Till 修饰符,可在Till 条件成立时于动作中途对机器人进行减速停止,完成TGo 动作。
使用Find 修饰符并且动作期间Find 条件成真时,将点数据保存到FindPos 中。
可使用!并行处理!,与动作并行执行其它处理。
如果附加了CP 参数,则可在开始动作减速时叠加后续动作命令的加速。此时,不对目标坐标进行定位。
如果在路径运动有效时设置了PerformMode 参数,则可叠加不同动作模式的减速动作和加速动作。根据动作模式, 可能无法叠加。
TGo
使用示例
>
TGo
XY(100, 0, 0, 0) '(在工具坐标系中)向X 方向移动100 mm
Function TGoTest
Speed 50
Accel 50, 50
Power High
Tool 0
P1 = XY(300, 300, -20, 0)
P2 = XY(300, 300, -20, 0) /L
Go P1
Print Here
TGo XY(0, 0, -30, 0)
Print Here
Go P2
Print Here
TGo XY(0, 0, -30, 0)
Print Here
Fend
[输出结果]
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0.000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -50.000 U: 0.000 V: 0.000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0.000 W: 0.000 /L /0
X: 300.000 Y: 300.000 Z: -50.000 U: 0.000 V: 0.000 W: 0.000 /L /0
2、CP动作指令
包括指令:Move、Arc、Arc3、Jump3/Jump3CP、BMove、TMove、CVMove
CP(Continuous Path )指令可以指定机械手到达目标位臵的运动轨迹。
优点:轨迹可以控制,匀速动作。
缺点:速度慢。
指定Linear动作速度和加/减速度,使用SPEEDS指令和ACCELS指令。
执行CP Onÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 209
209

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









