






前期看的文章大部分都是深度学习原理含量多一点,一直在纠结怎么改模型,论文看的很吃力,看一篇忘一篇,总感觉摸不到方向。想到自己是遥感专业,所以还是回归遥感影像去谈深度学习,回归问题,再想着用什么方法解决问题。
一、问题与解决方法
1、易丢失空间信息
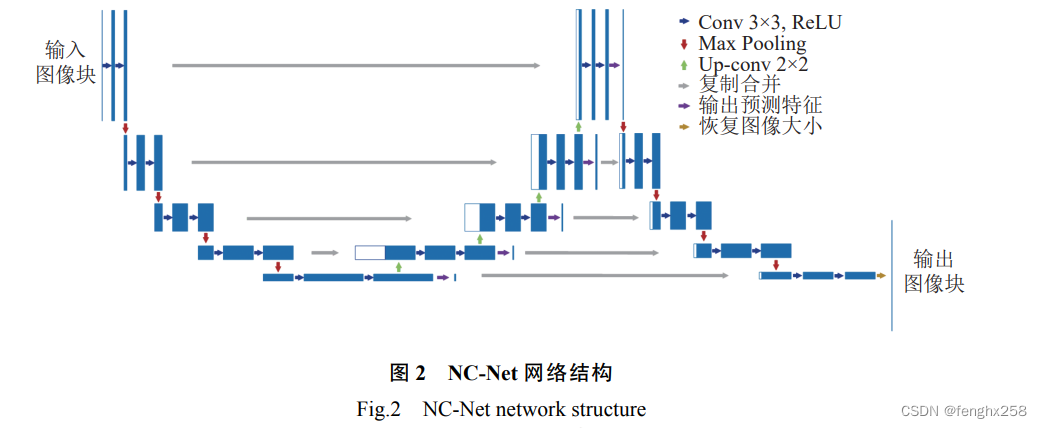
在 Decoder 阶段输出多尺度特征,与 ReEncoder 阶段结合获取全局上下文信息
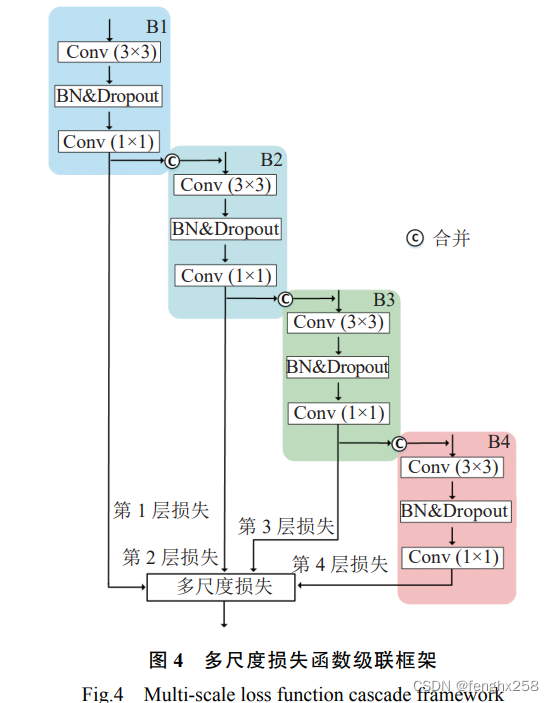
2、边界信息不明确
保留边界损失函数,设计多尺度损失函数级联方法
Attention U-Net,在 U-Net 网络高低级语义信息融 合的过程中,加入注意力控制模块( Attention gates),强化了有效信息的传递,对无效信息的传输进行抑制。
二、原理
1、问题一的原理
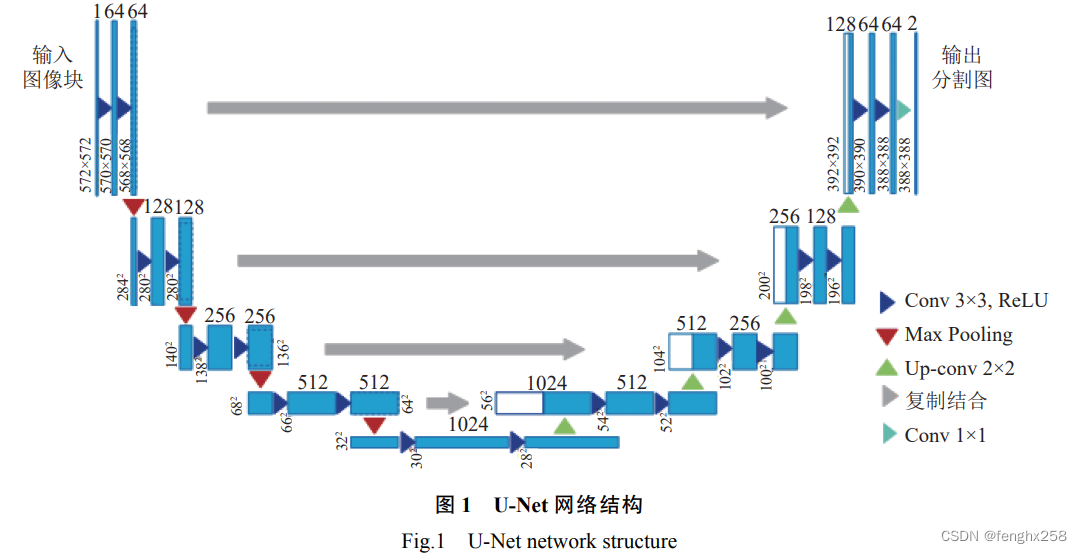
Unet网络
参考这三篇,写的特别详细
Pytorch深度学习实战教程(二):UNet语义分割网络 - 知乎 (zhihu.com)
Pytorch深度学习实战教程(三):UNet模型训练,深度解析! - 知乎 (zhihu.com)
(个人记录:损失函数优化器选择)
U-Net原理分析与代码解读 - 知乎 (zhihu.com)
作者的网络
网络可以看懂,但是不懂这样做可以解决第一个问题的原理。
2、问题2的原理
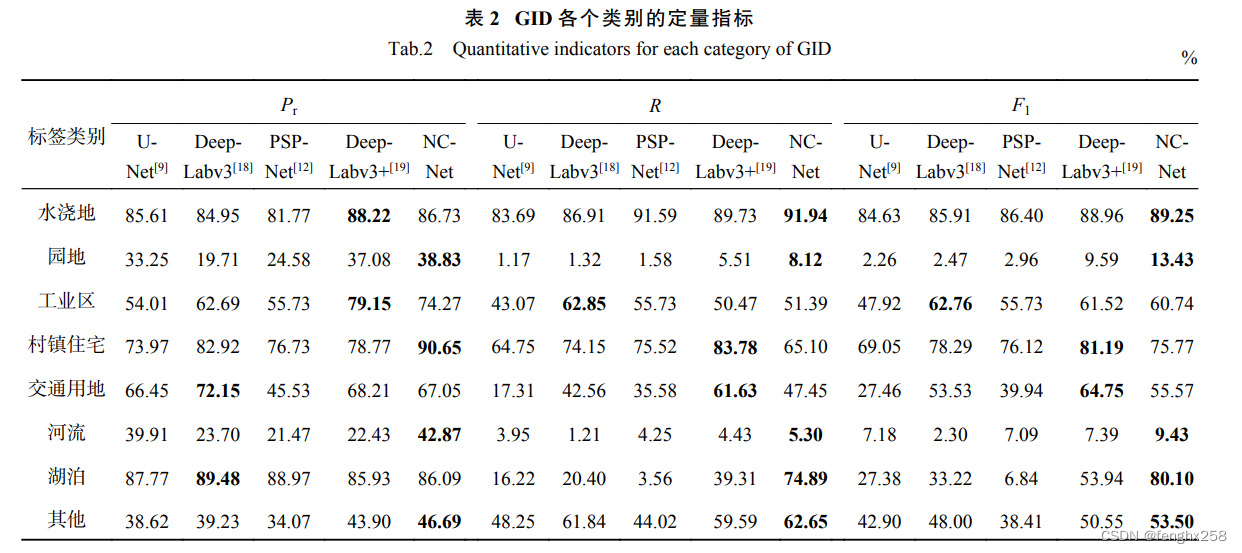
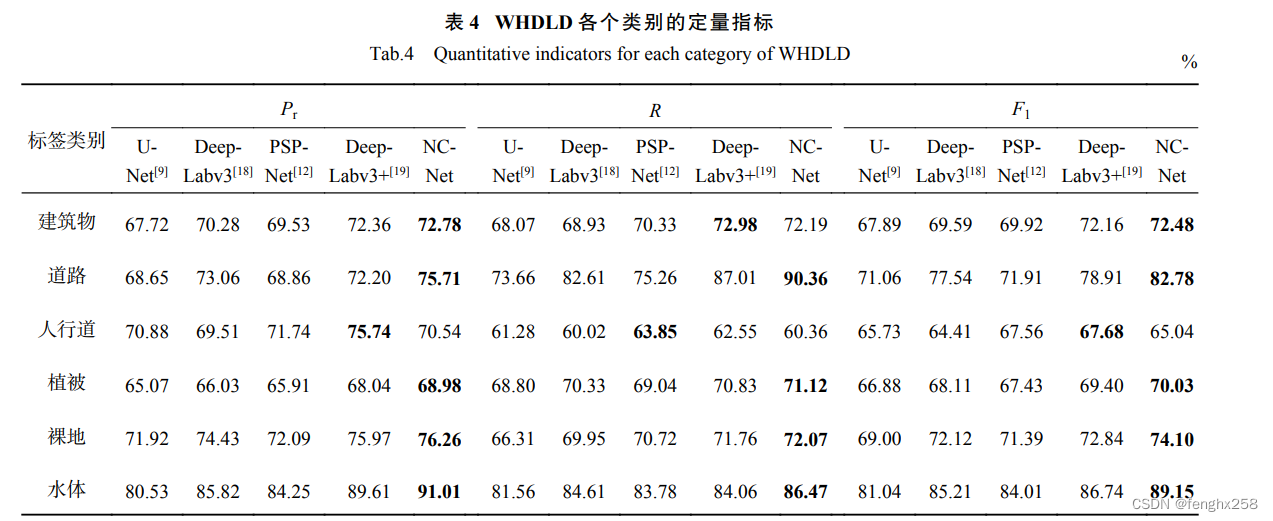
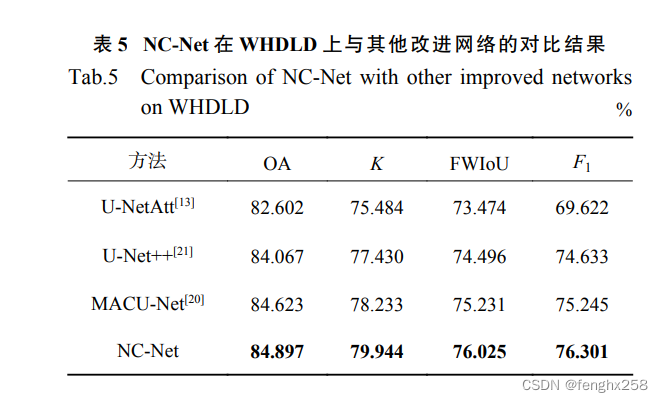
结果















 1673
1673











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









