






clear;
clc
close all;
%%
% 《全球导航卫星系统、惯性和多传感器综合导航系统原理》,第2版,Paul D.Groves著
% EXAMPLE 5.1
% 二维惯性导航
%% INTPUS
p = [10; 10]; % 初始位置
v = [0; 0]; % 初始速度
y = deg2rad(30); % 初始角度
w = [0; 0; 0; 0]; % 角速度输入
dt = 1; % 积分间隔
% 加速度输入
a = [0 2; % 北向加速
1 -2; % 东向加速,北向减速,
-1 -2 ; % 向南开
-1 2];
p_l = zeros(4,2); %记录位置
p_l(1,:)= p;
for i = 1:4
y_ = y; % 上一次的航向角
y = y + w(i)*dt; % 更新航向角
% 将加速度转换为p帧,得到平均值
Cnb_ = [cos(y_) -sin(y_); sin(y_) cos(y_)];
Cnb = [cos(y) -sin(y); sin(y) cos(y)];
Cnb = (Cnb_ + Cnb) / 2;
a_n = Cnb*a(i,:)'; %N系下加速度
%更新速度
v_ = v;
v = v + a_n*dt;
%更新位置
p = p + (v_ +v)*0.5*dt;
p_l(i+1,:) = p ;
end
fprintf("最终位置:(m)\n");
p
figure;
plot(p_l(:,1),p_l(:,2));
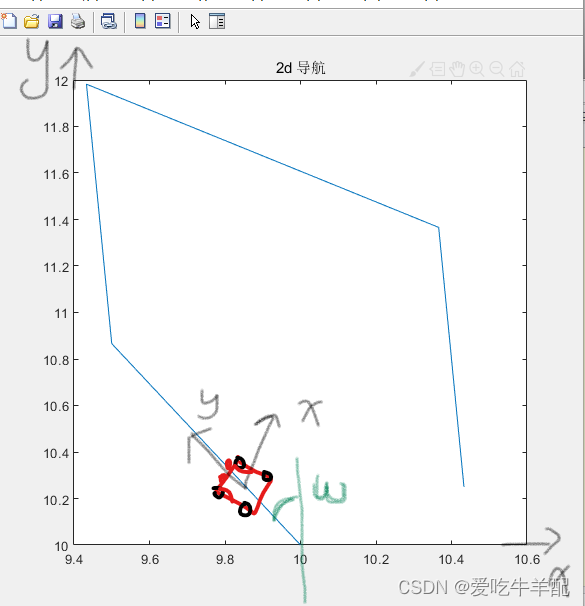
title("2d 导航");
运行结果:
碎碎念~:
2d导航的加速度和航向角总弄混,把它想想成开车就容易多了,车身有一个y向的速度用于控制前进后退,有一个x向的速度控制左右转弯,航向角是决定你的车头朝向那。你的视角是载体系b系,对于车身来讲,哪个位置又加速了;站在楼上正在看你的老妈的视角是n系,她可以知道你的车头朝向,和现在所在的位置。
和开车有一点不同,汽车不踩油门,不给加速度就会停;代码里则是需要给个反向加速度,速度才能减速,要不就保持原来速度。















 999
999











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









