






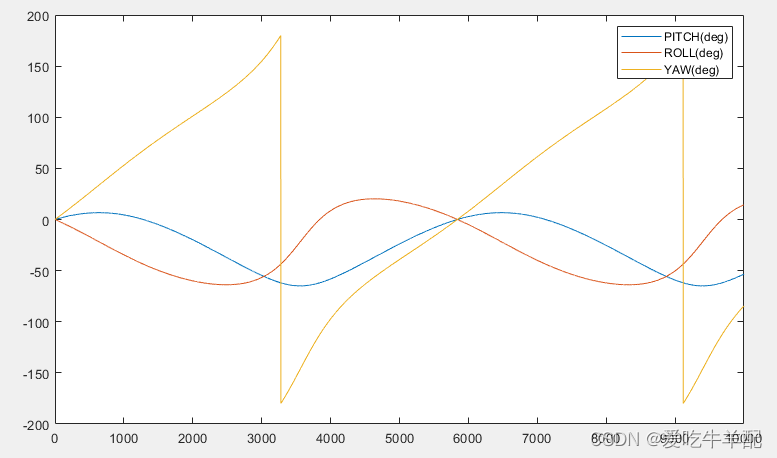
1. 利用旋转矩阵进行姿态更新
function Cb2n = ch_mnormlz(Cb2n)
% 姿态阵单位化,防止矩阵蠕变
for k=1:5
% Cnb = 0.5 * (Cnb + (Cnb')^-1); % Algorithm 1
Cb2n = 1.5*Cb2n - 0.5*(Cb2n*Cb2n')*Cb2n; % Algorithm 2
end
% Algorithm 3: [s,v,d] = svd(Cnb); Cnb = s*d'; % in = s*v*d' = s*d' * d*v*d'; out = s*d'clear;
clc
close all;
%% 已知信息
w = [2 -3 5]';
dt = 0.01; %姿态更新周期: 0.01s = 100Hz
dur = 100; %积分时长 单位s
N = dur / dt; %积分次数
eul = zeros(N, 3);
fprintf("已知b系角速度(陀螺仪输出为):%.3fdeg/s %.3fdeg/s %.3fdeg/s\n", w(1), w(2), w(3));
%定轴转动下: 等效旋转矢量 = 角增量 = 角速度*dt
Cb2n = eye(3);
theta = deg2rad(w)*dt;
for i = 1:N
C_m2m_1 = ch_rv2m(theta); % 等效旋转矢量转成旋转矩阵
Cb2n = Cb2n * C_m2m_1;
%单位阵正交化
Cb2n = ch_mnormlz(Cb2n);
%记录每一步的欧拉角,姿态阵转成欧拉角
eul(i,:) = rad2deg(ch_m2eul(Cb2n));
end
plot(eul)
legend("PITCH(deg)", "ROLL(deg)", "YAW(deg)");
tmp =eul(end,:);
fprintf("最终欧拉角: pich:%.4f° roll:%.4f° yaw:%.4f°\n", tmp(1), tmp(2), tmp(3));
运行结果:
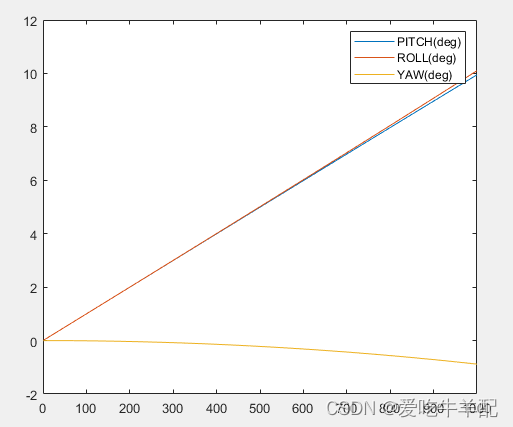
2. 利用四元数进行姿态更新
clear;
clc
close all;
%% 已知
w = [1 1 0]'; %角速度
dt = 0.01; %姿态更新周期: 0.01s = 100Hz
dur = 10; %积分时长 单位s
N = dur / dt; %积分次数
eul = zeros(N, 3);
fprintf("已知b系角速度(陀螺仪输出为):%.3fdeg/s %.3fdeg/s %.3fdeg/s\n", w(1), w(2), w(3));
Qb2n = [1 0 0 0]';
theta = deg2rad(w)*dt; %定轴转动下: 等效旋转矢量 = 角增量 = 角速度*dt
for i = 1:N
Q_m2m_1 = ch_rv2q(theta);
Qb2n = ch_qmul(Qb2n, Q_m2m_1);
%四元数单位化
Qb2n = ch_qnormlz(Qb2n);
%记录每一步的欧拉角
eul(i,:) = rad2deg(ch_q2eul(Qb2n));
end
plot(eul)
legend("PITCH(deg)", "ROLL(deg)", "YAW(deg)");
tmp =eul(end,:);
fprintf("最终欧拉角: pich:%.4f° roll:%.4f° yaw:%.4f°\n", tmp(1), tmp(2), tmp(3));
运行结果:
3. 失准角计算方法
失准角使用姿态矩阵计算的!!!
clear;
clc
close all;
format
%% 一个简单的失准角例子
% M_gen = ch_eul2m(deg2rad([30,40,50.2]))
Cb2n = [
0.2462 -0.6634 0.7066
0.7934 0.5567 0.2462
-0.5567 0.5000 0.6634
];
Cb2np = [
0.2434 -0.6654 0.7057
0.7943 0.5544 0.2487
-0.5567 0.5000 0.6634
];
fprintf("Cb2n: 真实姿态阵):\n");
fprintf("Cb2np: 计算导航系姿态阵(有误差的)):\n");
fprintf("失准角反对称阵为:\n");
phi_skew = -(Cb2np * Cb2n' - eye(3));
phi_skew
phi = [-phi_skew(2,3), phi_skew(1,3), phi_skew(1,2)];
phi = rad2deg(phi);
fprintf("失准角:%f %f %f (deg)\n", phi(1), phi(2), phi(3));
运行结果:
Cb2n: 真实姿态阵):
Cb2np: 计算导航系姿态阵(有误差的)):
失准角反对称阵为:phi_skew =
0.0000 0.0036 0.0000
-0.0035 -0.0001 -0.0000
0.0000 0.0000 -0.0000失准角:0.000044 0.002257 0.204619 (deg)















 9127
9127











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









