






1
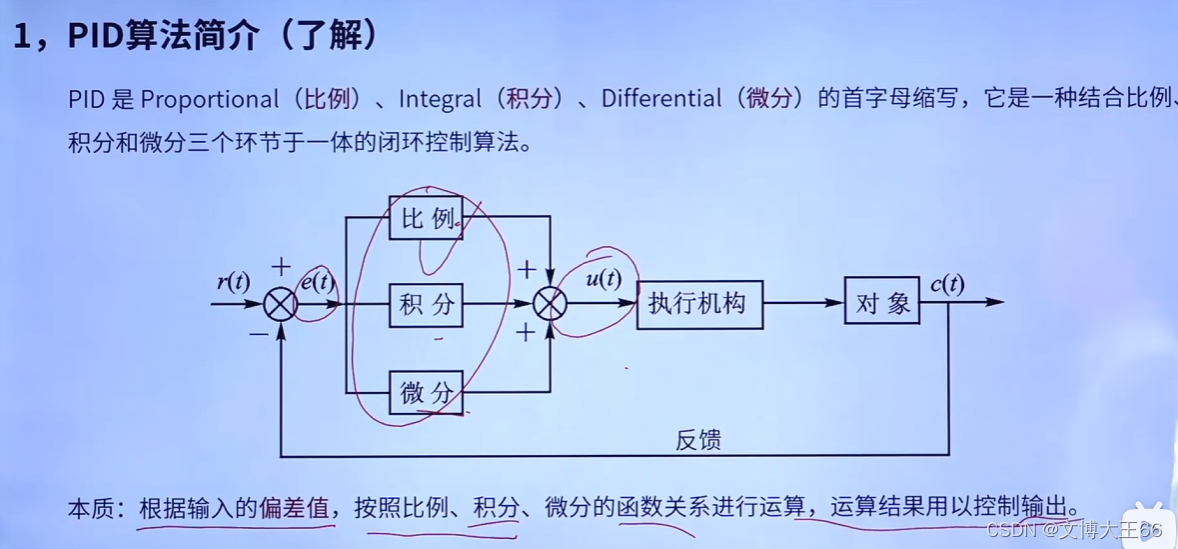
- e(t) 是偏差 实 和 目
- u(t) 是运算结果
2
- 层层叠加 得出完整的离散公式
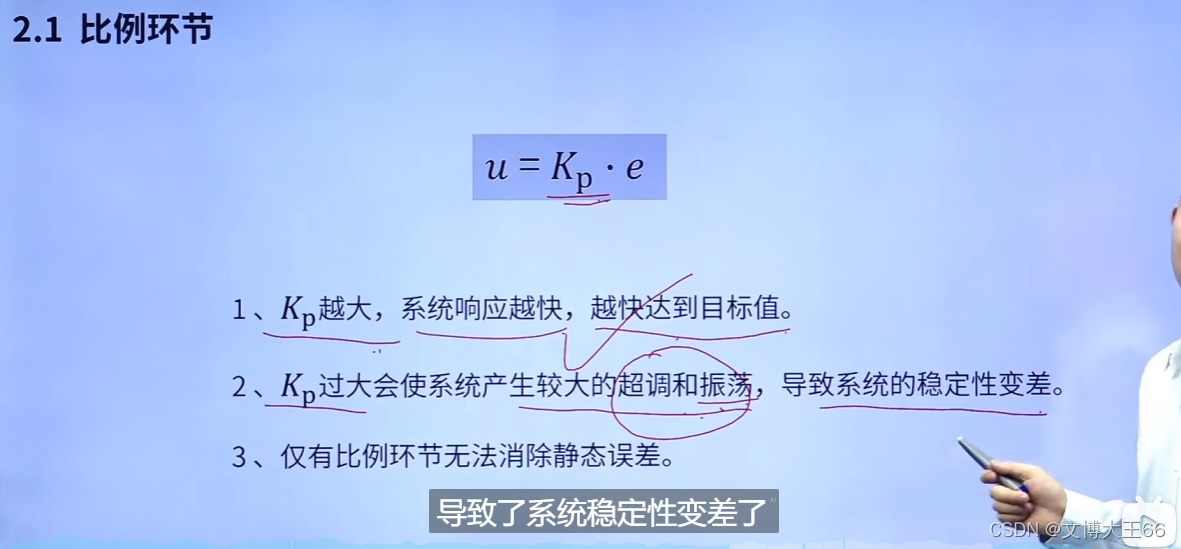
2.1
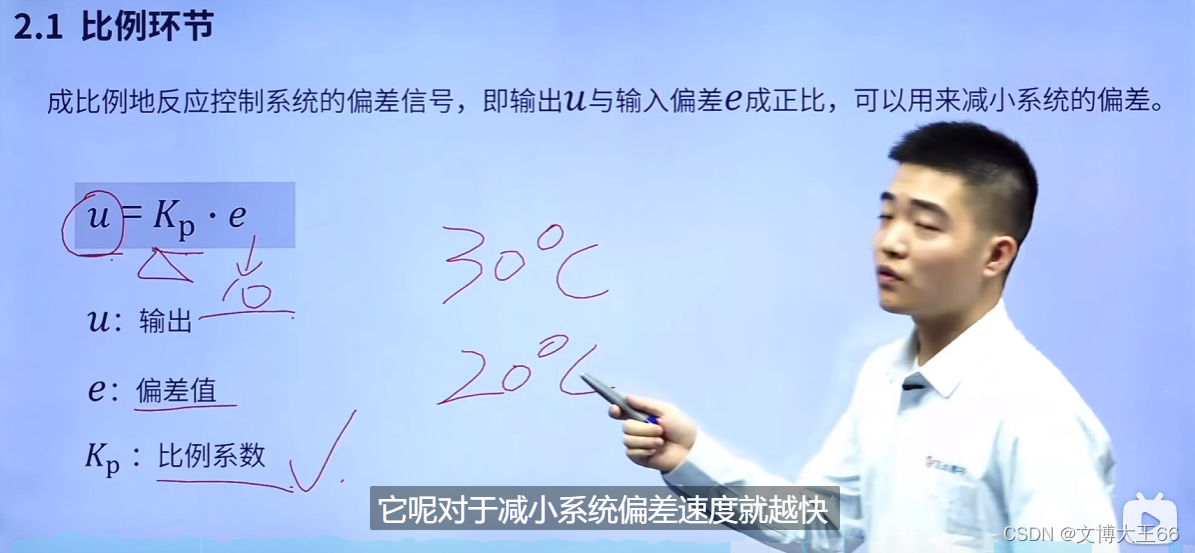
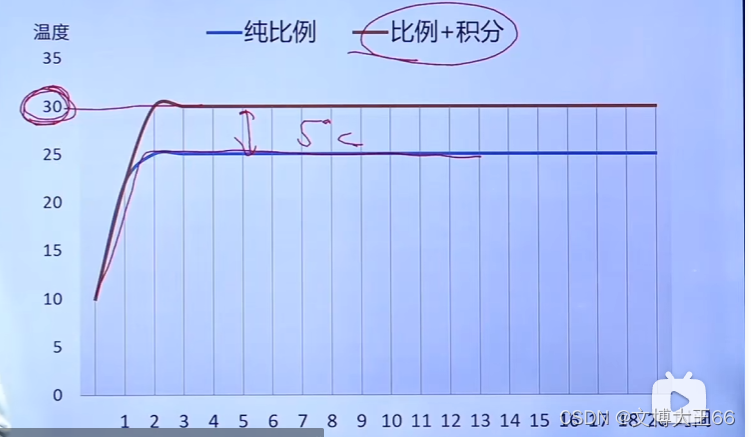
- kp 越大 系统偏差 减小的越快
- kp大的时候 会出现过冲现象?
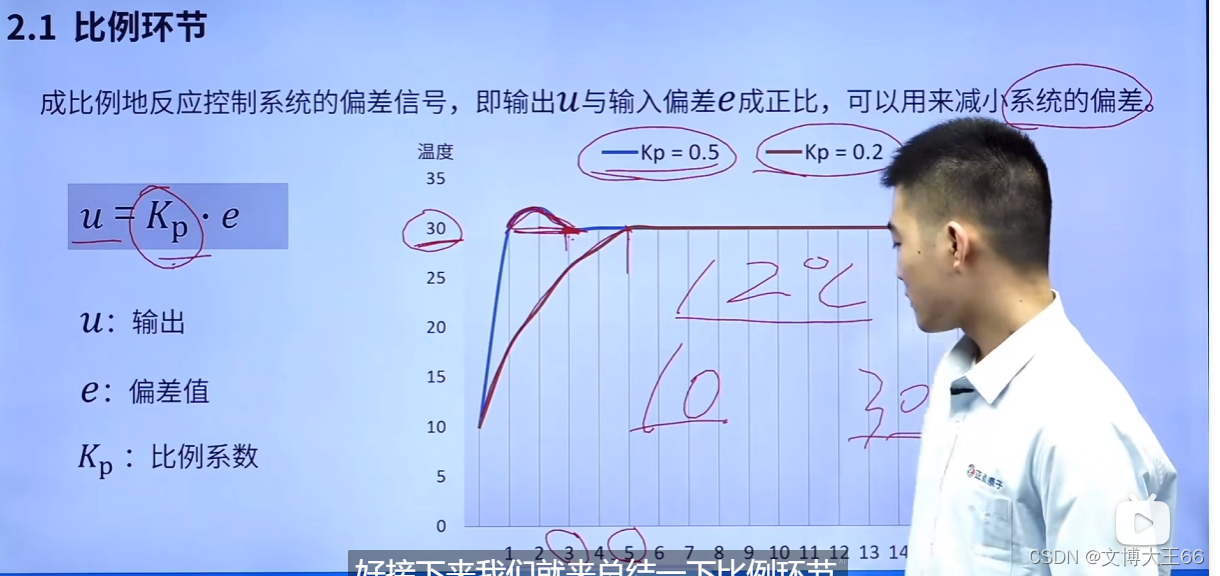
- 0.5 那个会快
- 他解释过冲 : 0.2的 5分钟正好到了 那0.5的五分钟 升的就比20多 就过冲???
- 我想的是 极限 或者 微小的想
- 这说的 降温 30分钟也是10 就稳定了 不增不减
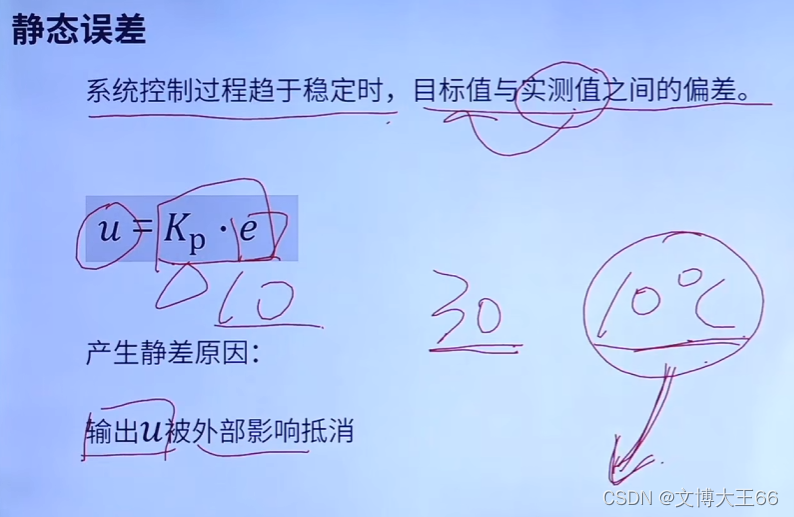
消除静态误差方法
- 说了增大比例系数
- 但他说常数的时候 行 外部影响变化时 kp不知道调多大了
- 我感觉没法完全消除吧
- kp也不能太大

- 最好方法
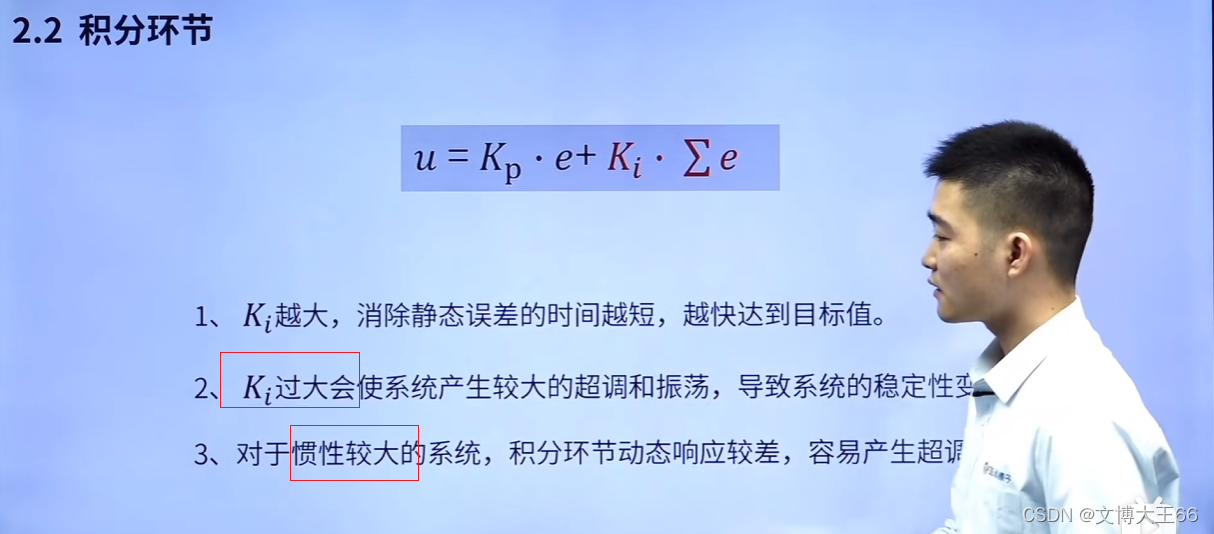
2.2
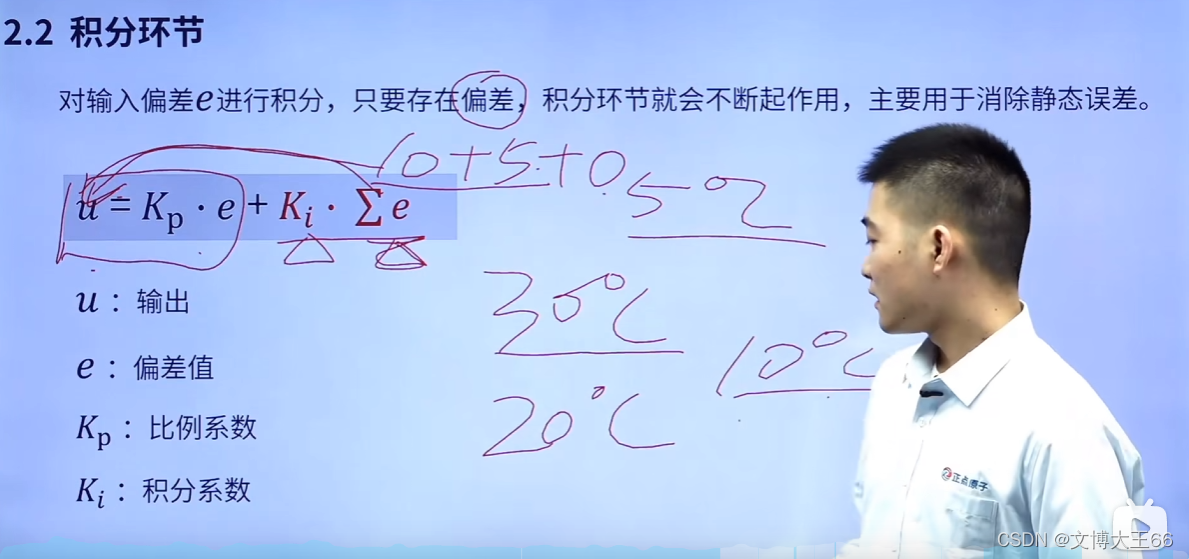
- ki是常数
- 这里离散 所以是求和
- 积分这项 感觉就是在逼近 外部因素
2.3
- 就像个反派 你误差想变大 我就加大输出 你想变小 我就阻碍输出
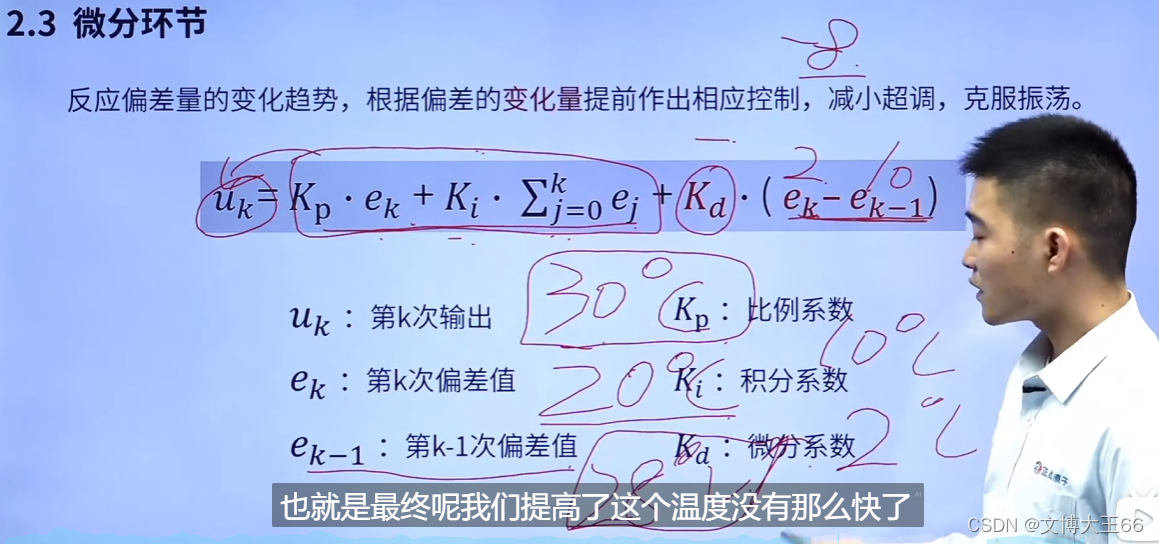
- 第一次 e 10 第二次 2 还按之前会超调 削弱一下

- 直流有刷 微分环节 作用不大 比例和积分就调的可以了
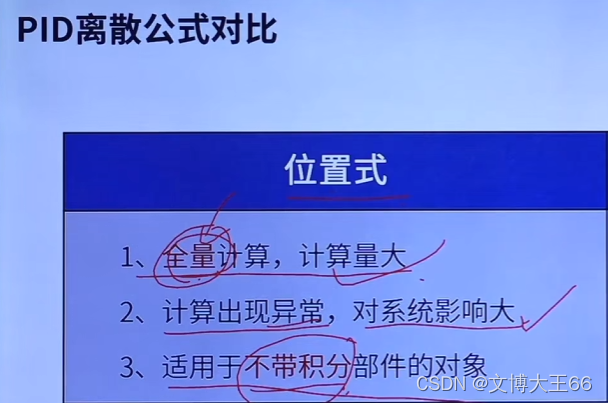
3
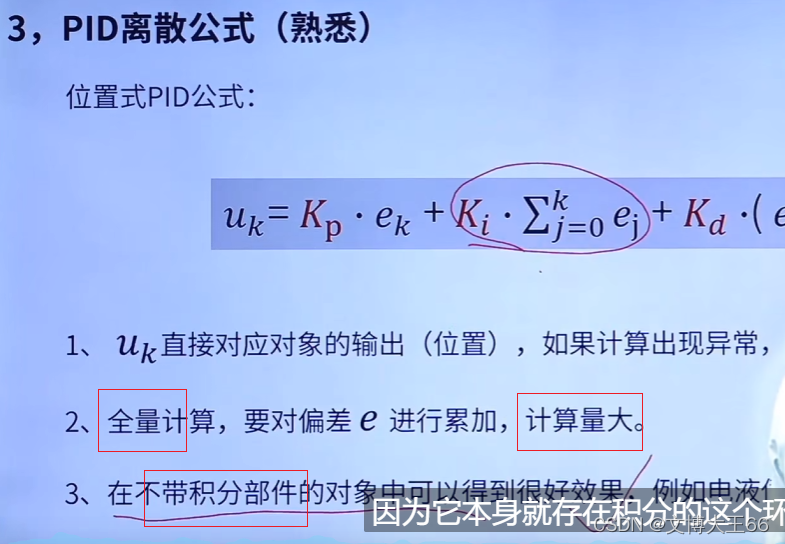
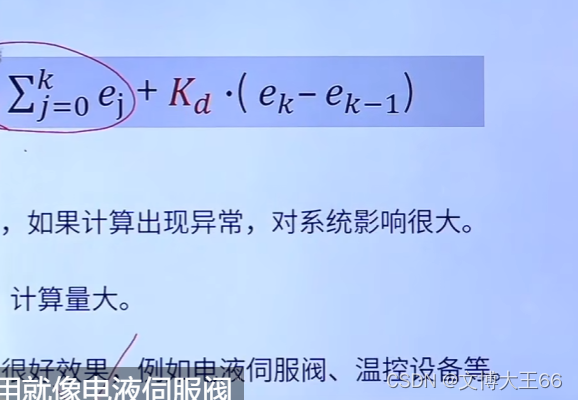
- uk直接对应输出 (增大) 有 累加所以影响会大
- 前面那些量 都进入公式计算 所以位置式pid 又称全量式pid
- 本身存在积分 步骤
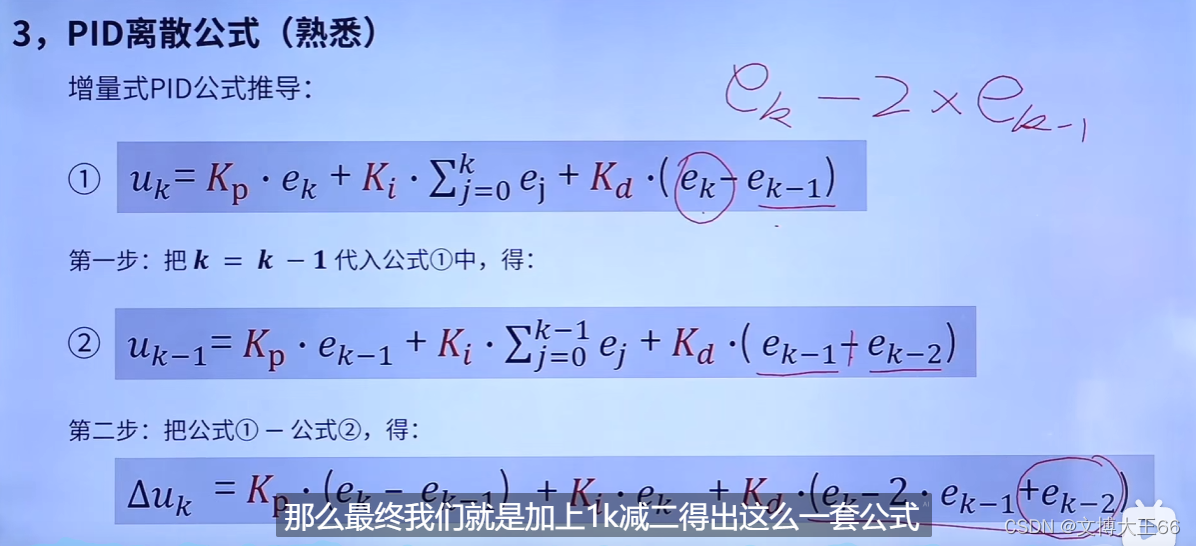
- 等号左边 第uk次 输出量的变化
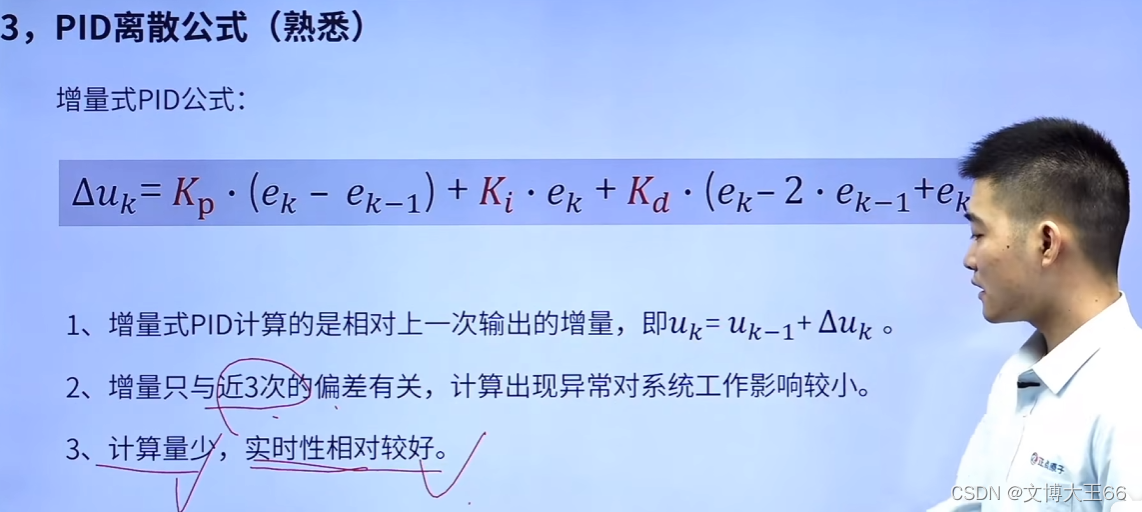
- 影响小 因为uk=u(k-1)+变化量 变化量影响很小
- 实时性好 电机速度闭环控制中可体现
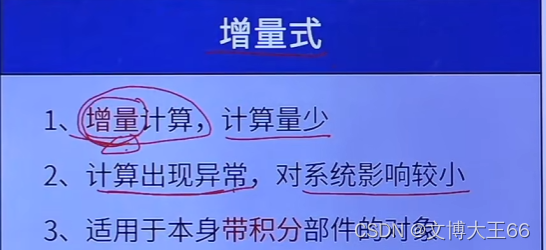
- 他后面教学里 BDC用这两公式 效果都好
4
4.1
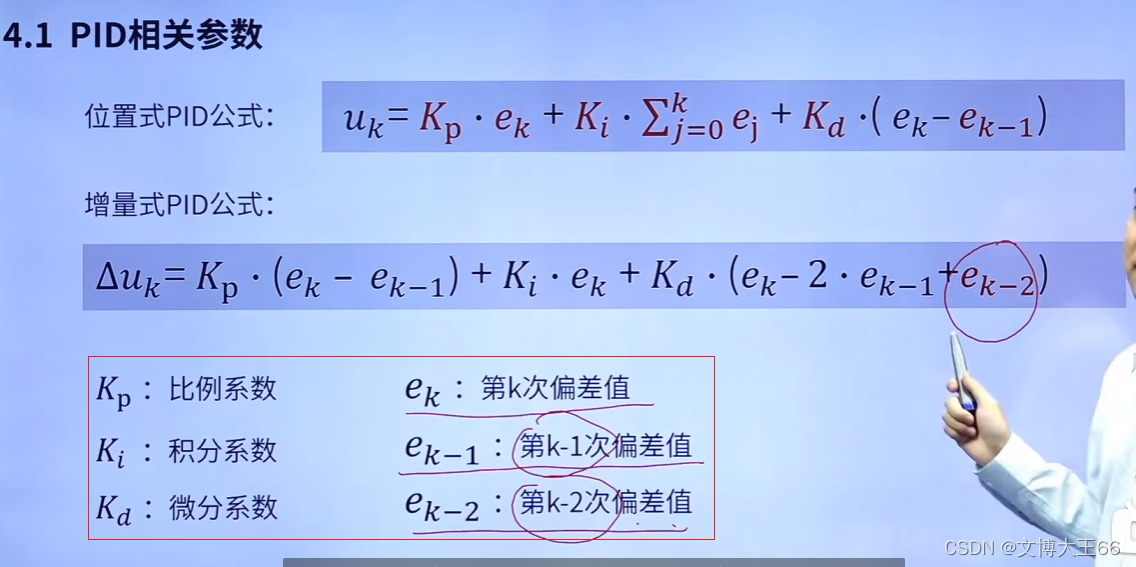
- 目标值 为了计算 e
- 这期望值 应该对应两个公式里的左边
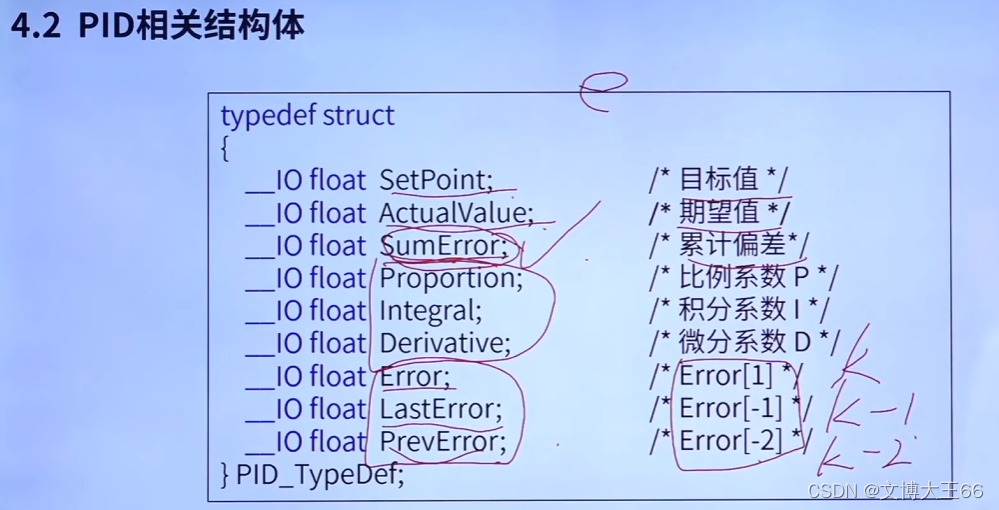
4.2
4.3
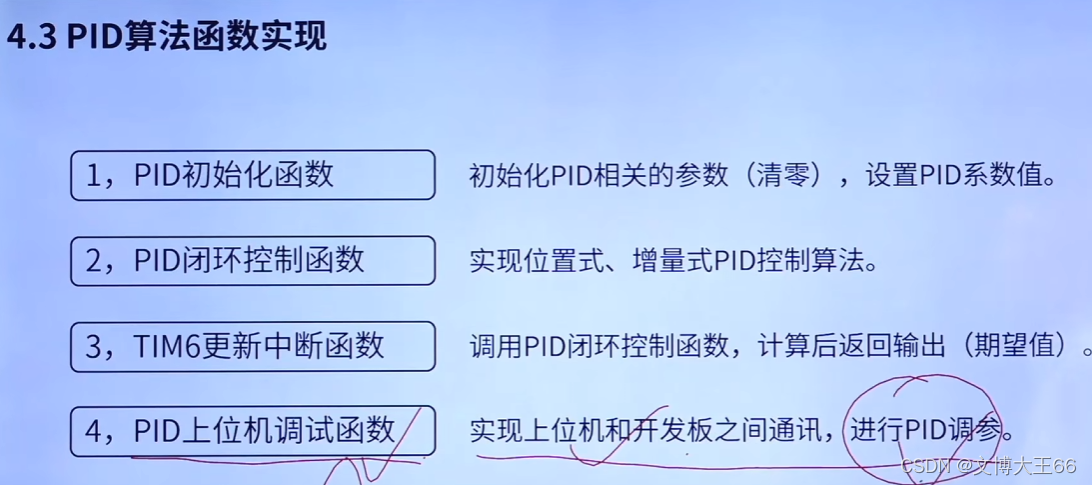
- 定时器那 就是用一下定时作用
- 4 一系列函数 先会用就行
- 如BDC速度环控制 通过定时器6 返回的是 比较值 (占空比- 电压 -速度)
先停















 707
707











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









