






 文章讲述了作者在使用ARMPI机器人底盘时遇到的问题,涉及到STM32的I2C通信,包括电机驱动、电压监控和编码器计数。作者通过实验发现电机在不同电压下的性能,并对I2C代码进行了调试和理解。
文章讲述了作者在使用ARMPI机器人底盘时遇到的问题,涉及到STM32的I2C通信,包括电机驱动、电压监控和编码器计数。作者通过实验发现电机在不同电压下的性能,并对I2C代码进行了调试和理解。
幻尔科技卖的ARMPI机器人小车底盘的电机是配套的,网上没有资料,问官方技术人员也回答的不清楚,例程代码注释也有问题,于是自己拿他们的代码试了试。
我买的这个机器人配套的是528电机也就是 JGB37-528R131-08 额定电压8V 但是电池供电7.4,充电。我不小心充到7.7后使用。
一下是STM32的代码(注释已经更正)部分代码有修改。
#include "include.h"
#define CAM_DEFAULT_I2C_ADDRESS (0x34) //I2C地址
#define MOTOR_TYPE_ADDR 20 //编码电机类型设置寄存器地址
#define MOTOR_FIXED_SPEED_ADDR 51 //速度寄存器地址。属于闭环控制
#define MOTOR_ENCODER_POLARITY_ADDR 21 //电机编码方向极性地址
#define MOTOR_FIXED_PWM_ADDR 31 //固定PWM控制地址,属于开环控制
#define MOTOR_ENCODER_TOTAL_ADDR 60 //4个编码电机各自的总脉冲值
#define ADC_BAT_ADDR 0 //电压地址
uint8_t data[3]; //用于暂存电压ADC数据
//读取多个字节的数据(Reg:地址 Buf:数据内容 Len:数据长度)
uint8_t I2C_Read_Len(uint8_t Reg,uint8_t *Buf,uint8_t Len)
{
uint8_t i;
IIC_start(); //发送起始信号
IIC_send_byte((CAM_DEFAULT_I2C_ADDRESS << 1) | 0); //发送元器件地址+写指令
if(IIC_wait_ack() == 1) //等待响应,如果失败,发送停止信号,返回1
{
IIC_stop();
return 1;
}
IIC_send_byte(Reg); //发送寄存器地址
if(IIC_wait_ack() == 1) //等待响应,如果失败,发送停止信号,返回1
{
IIC_stop();
return 1;
}
IIC_start(); //发送起始信号
IIC_send_byte((CAM_DEFAULT_I2C_ADDRESS << 1) | 1); //发送元器件地址+读指令
if(IIC_wait_ack() == 1) //等待响应,如果失败,发送停止信号,返回1
{
IIC_stop();
return 1;
}
for(i=0;i<Len;i++) //for循环Len次读取
{
if(i != Len-1) //如果不是最后一次
{
Buf[i] = IIC_read_byte(1); //保存第I次的数据到数组的第I位,并发送答应信号
}
else
Buf[i] = IIC_read_byte(0); //保存第I次的数据到数组的第I位,并发送非答应信号
}
IIC_stop(); //发送停止信号
return 0; //读取成功,返回0
}
//循环发送一个数组的数据(addr:地址 buf:数据内容 leng:数据长度)
uint8_t I2C_Write_Len(uint8_t Reg,uint8_t *Buf,uint8_t Len)//I2C的写数据
{
uint8_t i;
IIC_start(); //在起始信号后必须发送一个7位从机地址+1位方向位,用“0”表示主机发送数据,“1”表示主机接收数据。
IIC_send_byte((CAM_DEFAULT_I2C_ADDRESS << 1) | 0); //发送 器件地址+写的命令
if(IIC_wait_ack() == 1) //等待响应,如果失败,发送停止信号,返回1
{
IIC_stop();
return 1;
}
IIC_send_byte(Reg); //发送 寄存器地址
if(IIC_wait_ack() == 1) //等待响应,如果失败,发送停止信号,返回1
{
IIC_stop();
return 1;
}
for(i =0;i<Len;i++) //循环 len 次写数据
{
IIC_send_byte(Buf[i]); //发送第i位的8位数据
if(IIC_wait_ack() == 1) //等待响应,如果失败,发送停止信号,返回1
{
IIC_stop();
return 1;
}
}
IIC_stop(); //发送结束,发送停止信号
return 0; //返回 0,确定发送成功
}
//电机类型具体地址
#define MOTOR_TYPE_WITHOUT_ENCODER 0 //无编码器的电机,磁环每转是44个脉冲减速比:90 默认
#define MOTOR_TYPE_TT 1 //TT编码电机
#define MOTOR_TYPE_N20 2 //N20编码电机
#define MOTOR_TYPE_JGB37_520_12V_110RPM 3 //磁环每转是44个脉冲 减速比:90 默认 (本项目使用的是528直流减速编码电机)
/*用数组传递电机速度,正数为设置前进速度,负数为设置后退速度
以p1、p2为例:p1=4个电机以xx的速度前进 p2=4个电机以xx的速度后退 单位为RPM*/
uint8_t p1[4]={90,90,90,90}; //电机转速设置 正数为正转(顺时针)
uint8_t p2[4]={-10,-10,-10,-10}; //电机转速设置 负数为反转(逆时针)
uint8_t MotorEncoderPolarity = 0; //电机极性控制变量 为1或0,为0时正转读数为正
uint32_t EncodeTotal[4]; //用于暂存电机累积转动量的值,正转递增,反转递减
uint8_t MotorType = MOTOR_TYPE_JGB37_520_12V_110RPM; //设置电机类型
int main(void)
{
u16 v; //用于暂存电压值
SystemInit(); //系统时钟初始化为72M SYSCLK_FREQ_72MHz
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
InitDelay(72); //初始化延时函数
InitTimer2(); //定时器2初始化
IIC_init(); //IIC初始化
Usart1_Init(); //串口初始化
InitLED(); //初始化LED指示灯
DelayMs(200);
I2C_Write_Len(MOTOR_TYPE_ADDR,&MotorType,1); //在电机类型地址中写入电机类型编号
DelayMs(5);
I2C_Write_Len(MOTOR_ENCODER_POLARITY_ADDR,&MotorEncoderPolarity,1); //设置电机极性设置
DelayMs(5);
while(1)
{
I2C_Read_Len(ADC_BAT_ADDR,data,2); //读取电机电压
v = data[0] + (data[1]<<8); //转换电压
printf("V = "); printf("%d",v); printf("mV\n"); //打印电压
I2C_Read_Len(MOTOR_ENCODER_TOTAL_ADDR,(uint8_t*)EncodeTotal,16);
printf("Encode1 = %ld Encode2 = %ld Encode3 = %ld Encode4 = %ld \r\n", EncodeTotal[0], EncodeTotal[1], EncodeTotal[2], EncodeTotal[3]);
/*在电机转速地址中写入电机的转动方向和速度:WireWriteDataArray(转速控制地址,电机转速数组,电机个数)*/
I2C_Write_Len(MOTOR_FIXED_SPEED_ADDR,p1,4); //控制电机转动
DelayMs(1000);
// I2C_Write_Len(MOTOR_FIXED_SPEED_ADDR,p2,4); //控制电机转动
// DelayMs(1000);
}
}驱动板是IIC协议进行控制和数据回传,回传数据包括电压,四个电机编码器的计数。
实测在7.7V电压下转速约为80RPM 电机额定满转速为90RPM 而90*(7.7/8) ≈ 86 RPM。
所以在电机转速数组p1中填的值应该是转速RPM (亲测填了100也没转的更快),而且80RPM也接近额定电压下的转速了,所以基本可以排除是PWM的值。
另外,本人问官方群技术人员,回答说用的528电机型号值跟
#define MOTOR_TYPE_JGB37_520_12V_110RPM 3 的一样,但是TT编码电机的也行,不知道为什么。
补充1:要注意给电机写速度值得时候一定是循环写入,不能只写有限次,一停止写电机就不转了。
补充2: 0x33是一号电机的速度值寄存器 0x34是二号电机 0x35是三号电机 0x36是四号电机。
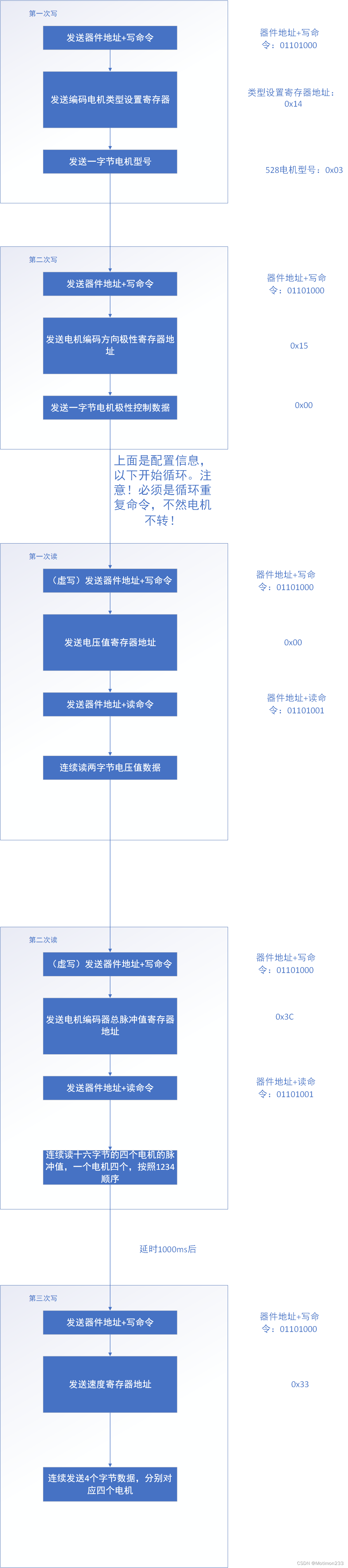
以下简单整理了其STM32代码中IIC的读写流程:















 1327
1327











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









