







#PID讲解
前言:本文参考华南小虎队的PID视频,视频连接放在最后
下图工人控制水阀可以满足: 1流量稳定 2随时改变流量
如果预期流量是1L/s,实际流量确实0.8L/s,工人就会调节阀门,使其达到,预期流量。
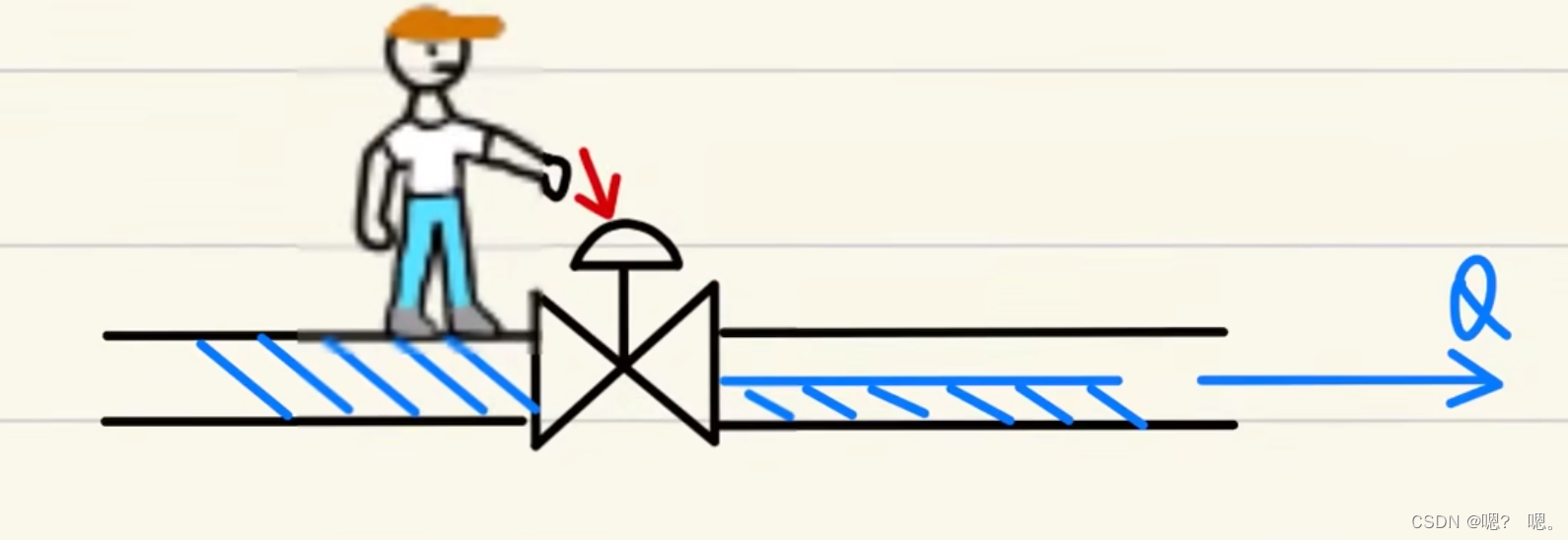
在这个系统中,PID可以代替工人的工作,查看水流量从而去控制流水量的大小,称为一个闭环系统。
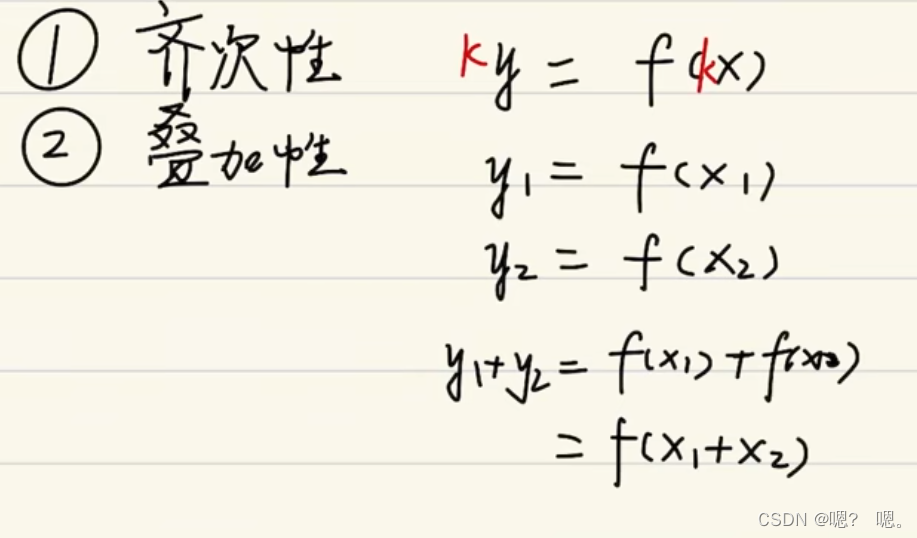
PID适用系统:PID适用于线性系统,也就是二阶以内线性系统,这种系统需要满足1齐次性2叠加性,下图是齐次性还有叠加性的描述。
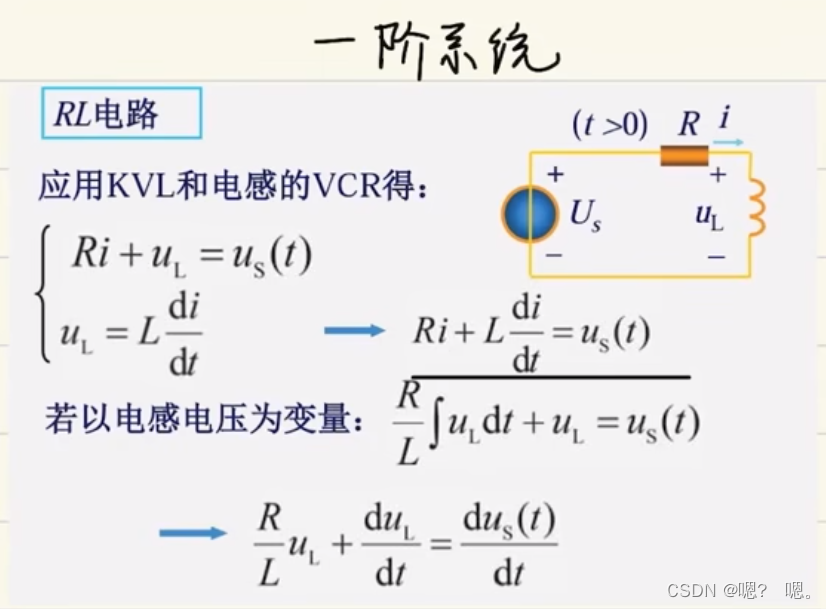
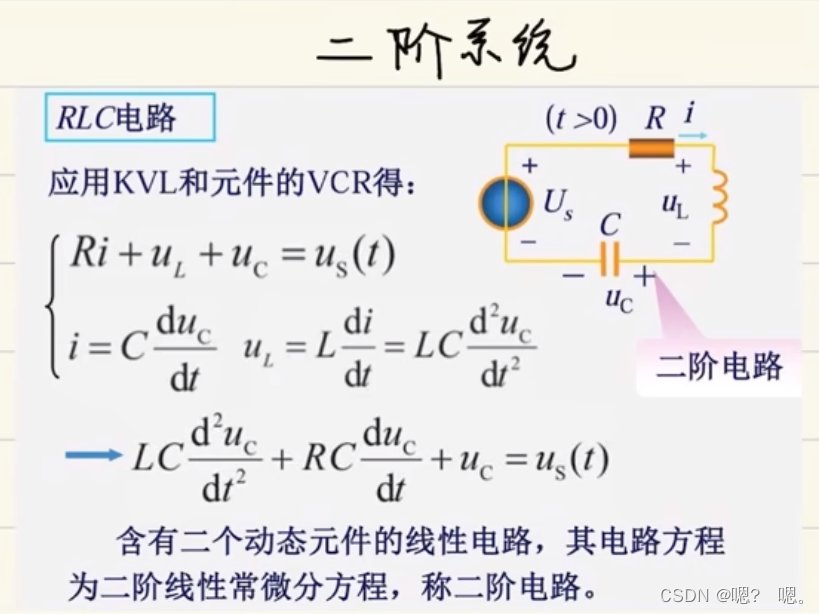
PID不适用系统:PID在大部分高阶系统,是不能使用的,如果高阶系统可以简化为二阶系统是可以使用的。
PID宏观意义:在自动化控制,嵌入式领域,PID是一个很强大很实用的算法,只要想用大部分项目都能用上PID。
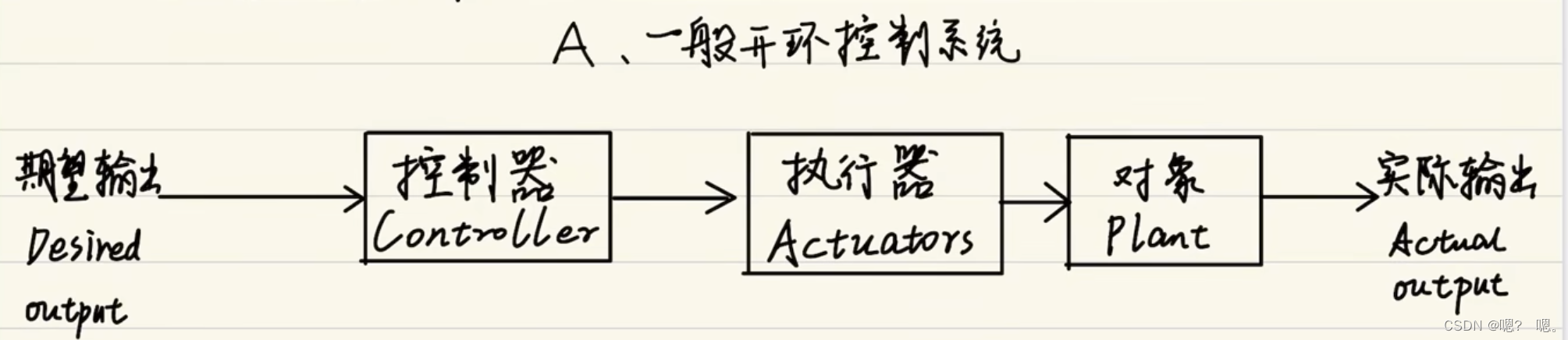
开环控制系统:这种系统输出不会对输入造成影响,像是断开的环一样叫做开环控制系统。
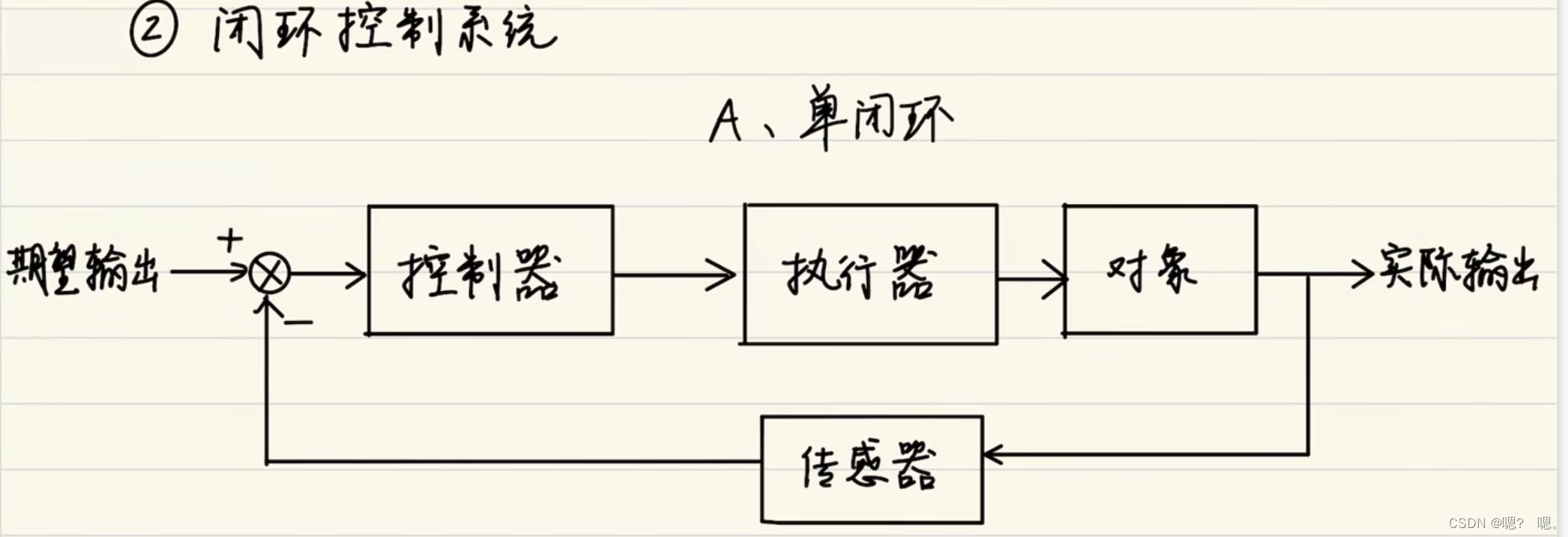
闭环控制系统:系统输出会反过来作用系统输入,调节输入影响输出,不断达到期望值,下面图只有一个闭环回路,是但闭环控制系统。
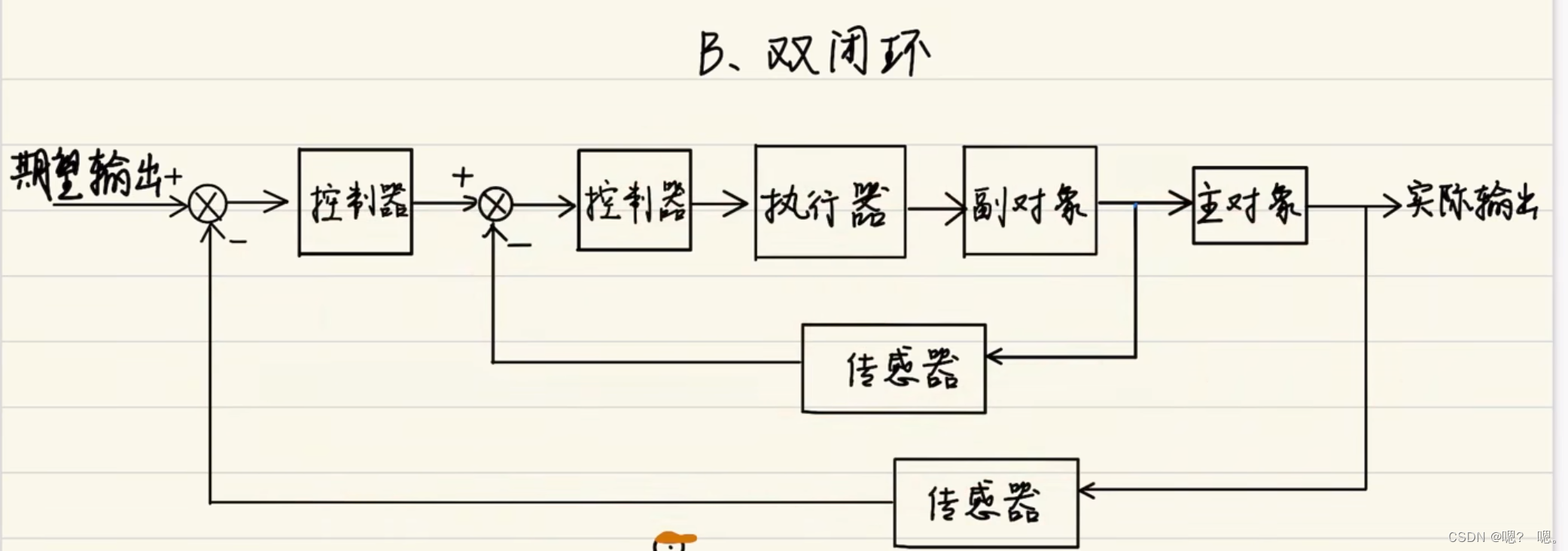
双闭环控制系统:这种控制系统由两个闭环回路组成,顾名思义叫做双闭环系统,里面的环叫做内环,外面的环叫做外环。
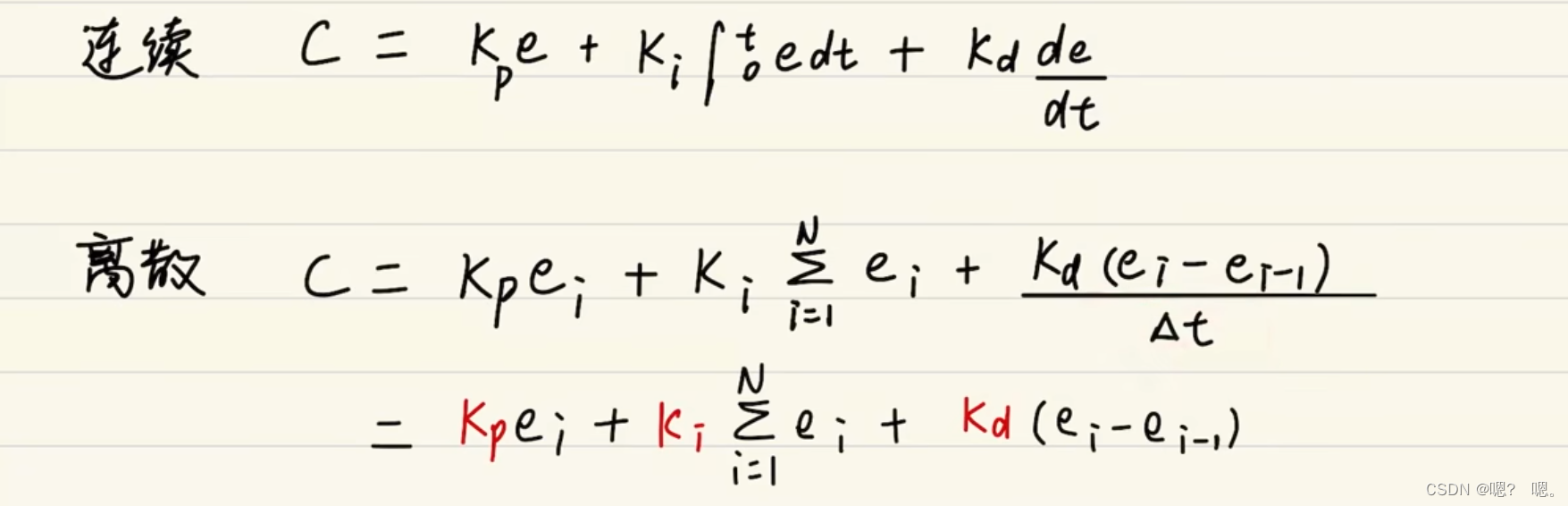
PID数学公式:PID公式的一种,但是实际常用的PID公式是离散型PID公式而不是这种。

连续离散型PID公式:如下图所示,组常用的是离散型公式,因为单片机是离散型的。
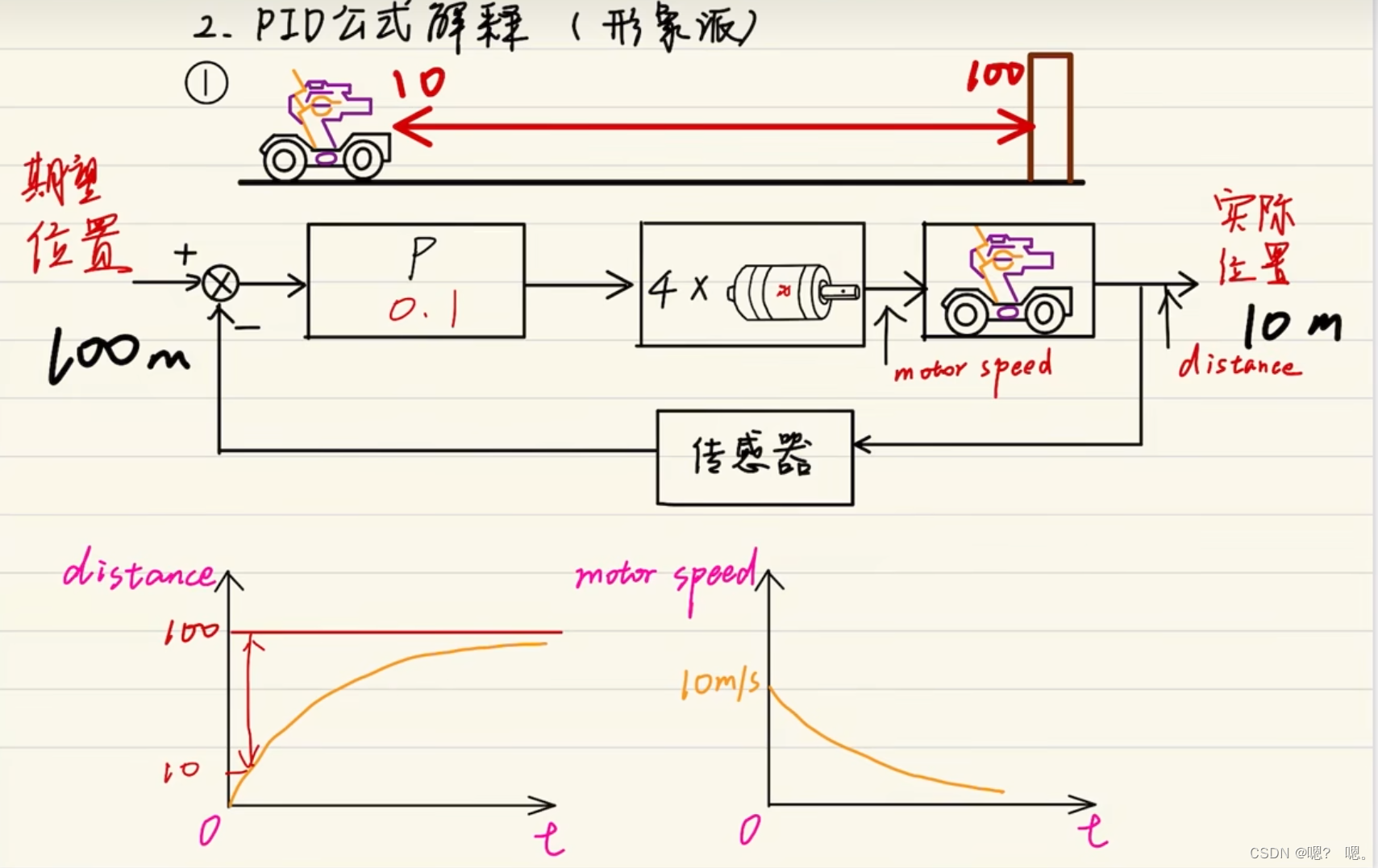
PID算法P算法理解:小车距离目标100m,之用P算法,会施加一个前进的力,当达到目标点的时候,速度会不断减小,以及速度,距离会随着时间去下降和上升。这种情况下只适用于,P算法数值较小的情况,当P算法过大,会出现过冲情况。但是在接近目标的时候,时钟会有一个很微小的偏差,不能接近。
PID算法I算法:I算法用来解决稳态误差,稳态误差就是系统在接近预定值,但由于只有P算法在靠近预定值的时候时钟没有办法,达到预定值,这个误差叫做稳态误差。
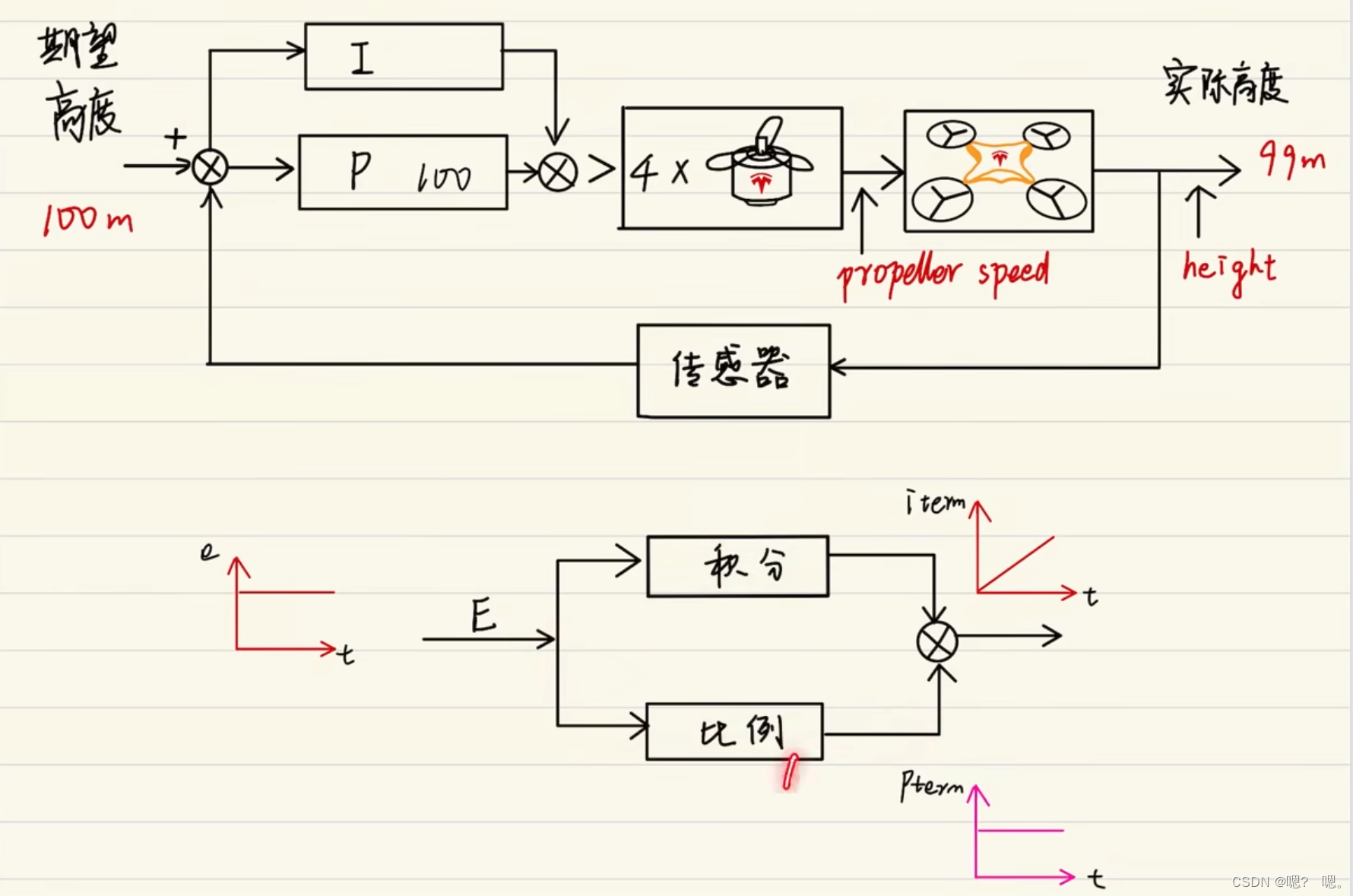
这里I算法就是积分,通过误差累加,来提供一个影响来对,输入进行调节,使无人机接近预定值没有偏差,实际写码需要对,I算法的累加值进行限制,防止其值过大。
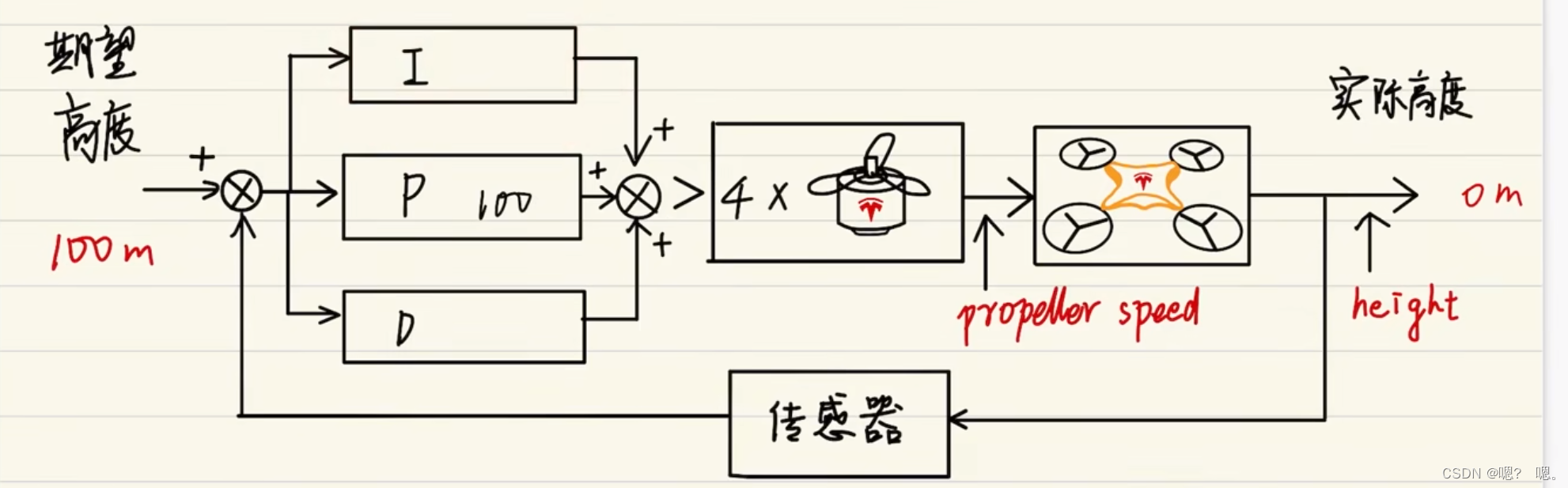
PID算法D算法:PID的D算法实际是对P算法对输入影响提供一个阻力,防止P算法过度调节,超过预定值,出现震荡现象。
#PID调参讲解
PID调参:PID调参就是对,控制算法里面所用到P算法 I算法 D算法 选取组合的组合函数,参数进行调节,这里需要知道每个函数的作用,意义就知道,实物具体表现得时候需要对,那个算法进行调节参数。
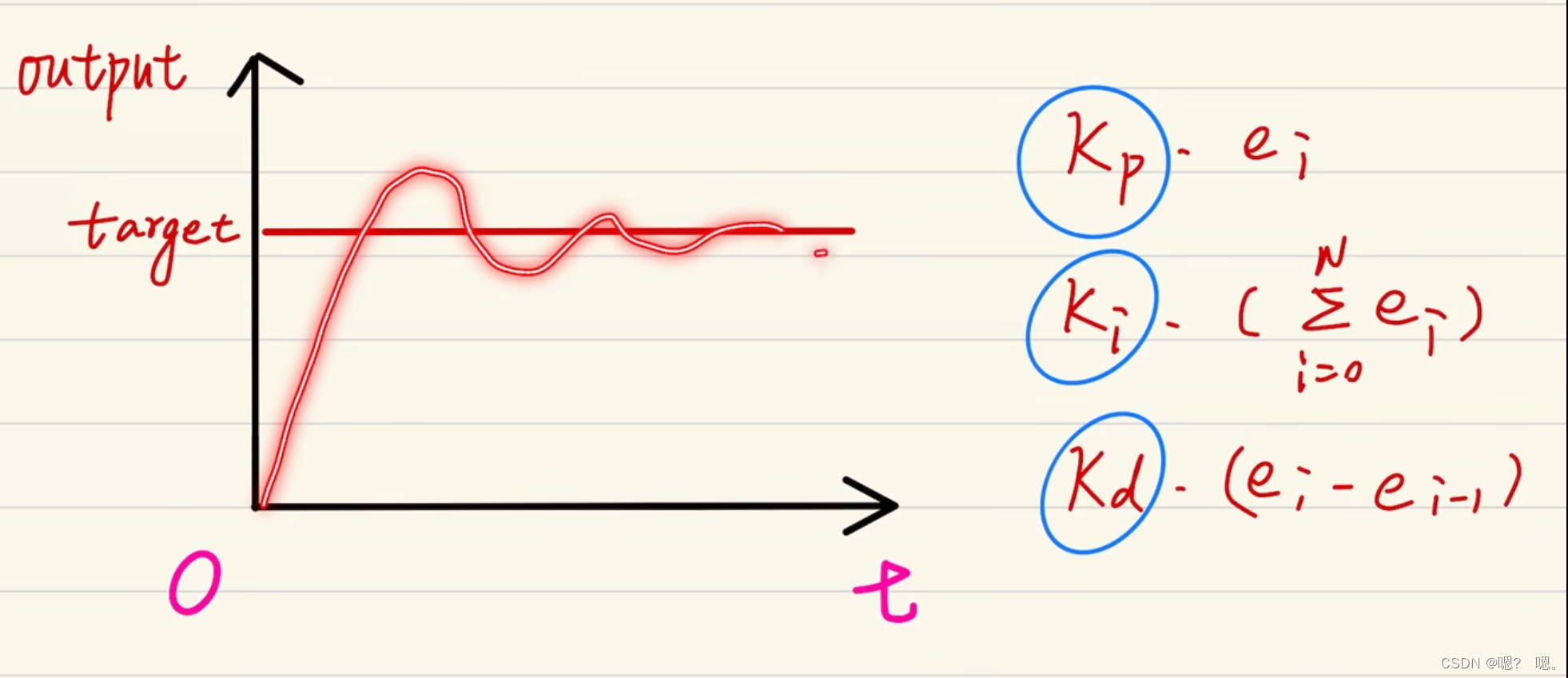
具体调参:假设这个时候只有P算法进行调节,这个时候看图,P算法明显过大,围绕target,出现震荡,这个时候可以调节D算法的值减小震荡,但是D算法的值不能太大,会影响响应时间,或者减小P算法的取值,但是那样也会是响应时间减小,PID一般在使用的过程中,组合为PI PD,进行控制使用PID三个算法都用的上的反而不多。
具体调参:一般是调节P算法,使其慢慢接近target,然后如果对精度要求很高加入I算法,如果没有,但是对相应时间有要求,需要提高P算法的值,从而减小响应时间,这个时候就会围绕target的值出现震荡,这个时候需要加入D算法,但是这个值不能大,对震荡进行调节。
I算法积分限幅详解:I算法是累加算法,当存在误差时候,I算法会一直累加,进行调节影响输入当I算法的值没有限制的时候,会一直进行累加,哪怕是一个很小的值,最终结果也会变成一个很大的值,具体对应在无人机上,在经过一段时间之后会一飞冲天。
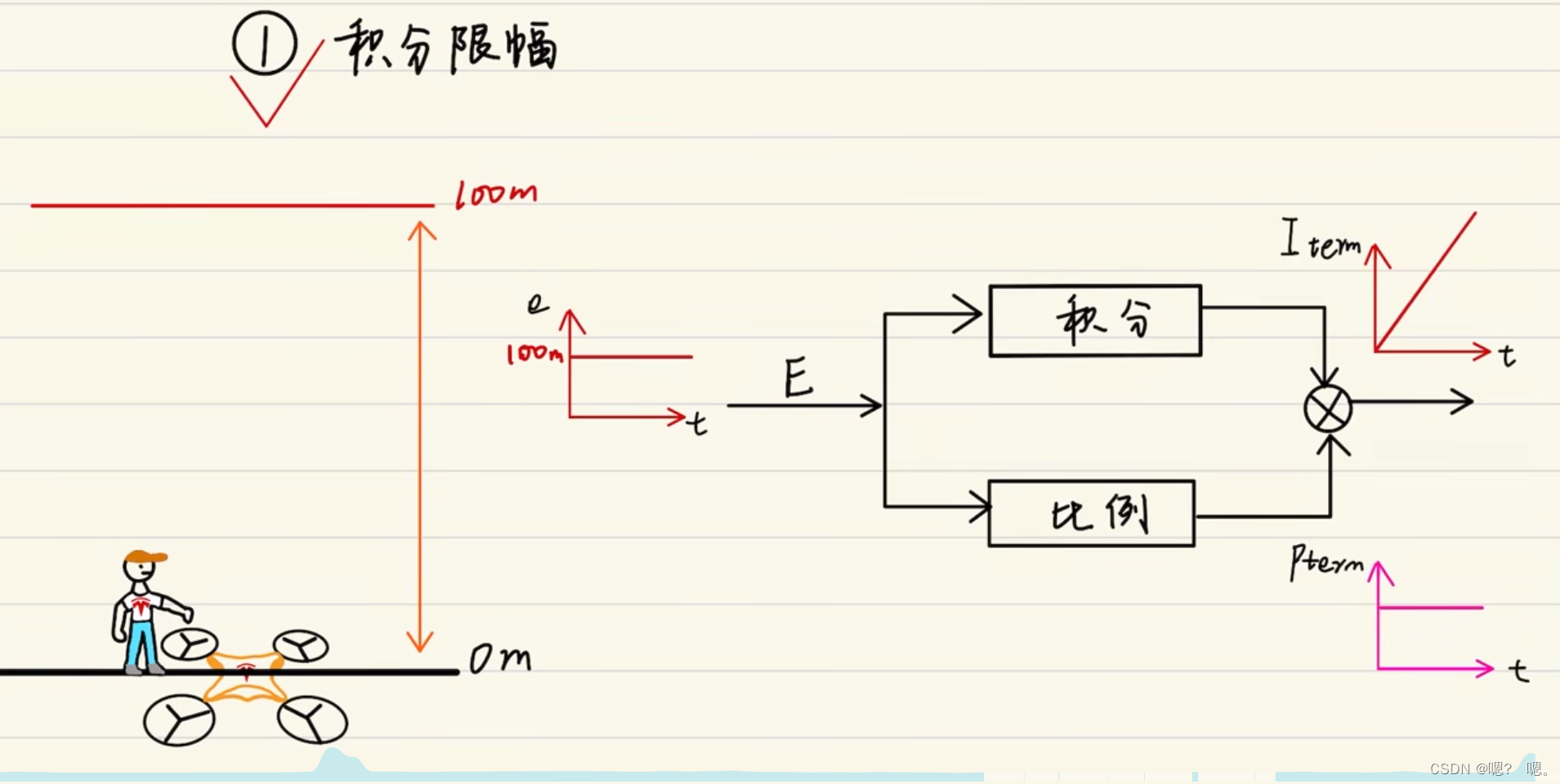
I算法如何进行限幅:具体数值,需要根据实物表现进行调节,可以先让实物跟目标值有一段距离不变,是I算法的值进行增长,随便取一个限定值,看根据超过target的表现进行调节。
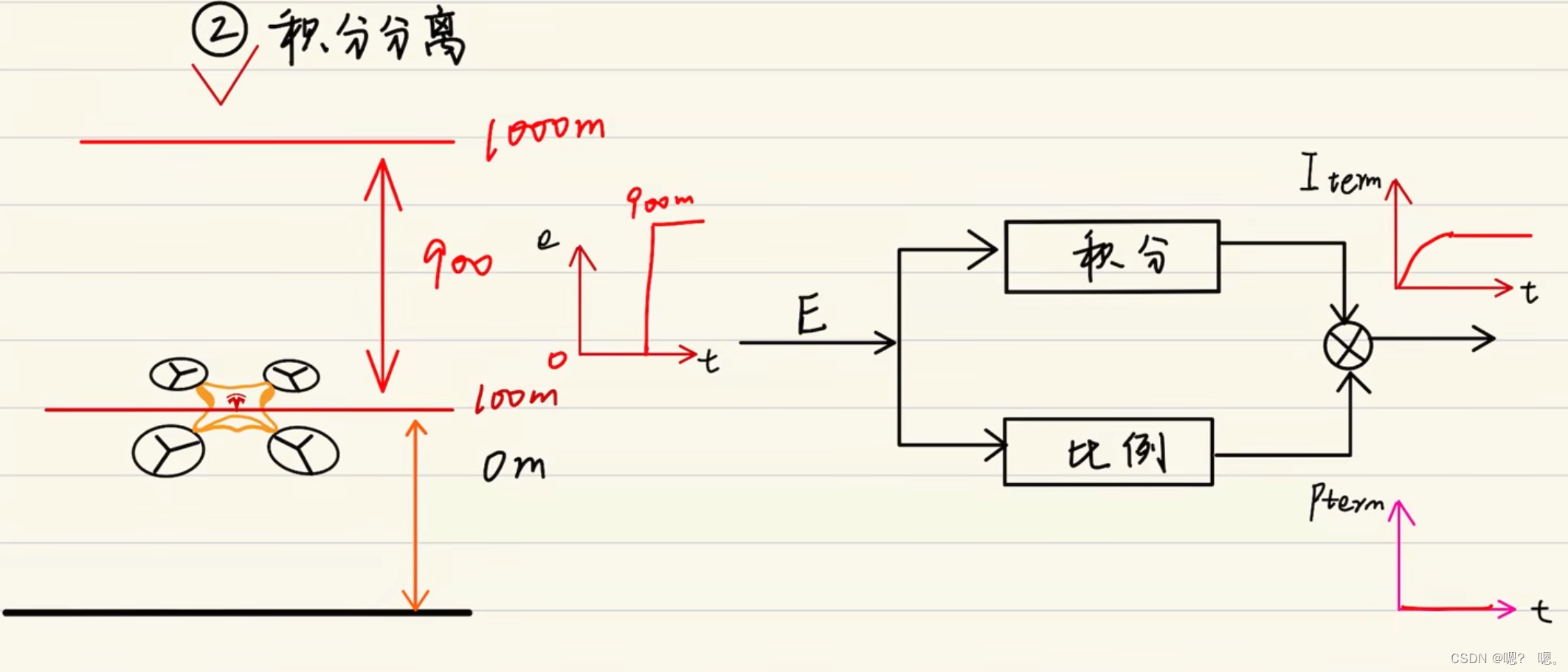
I算法积分分离详解:如果I算法在没有限制的情况下,能不能对其进行调节,可以通过I算法的积分分离,也就是通过软件的方法,当误差超过一定值的时候,比如说300,让I的累加值赋0,然后当误差小于这个值,在进行累加,这种方法,也能对I算法进行调节控制,也就是积分分离。



















 386
386

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











