






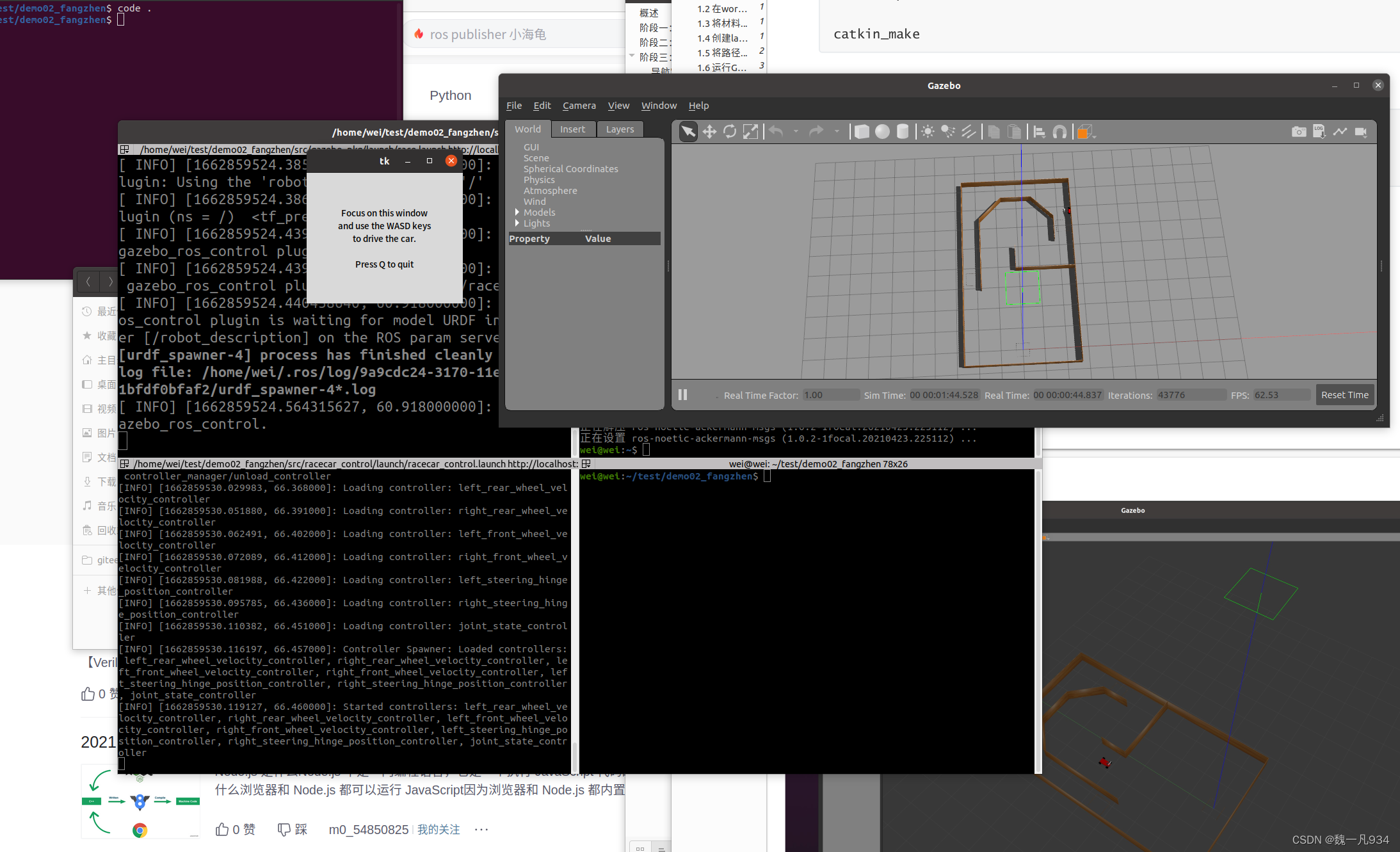
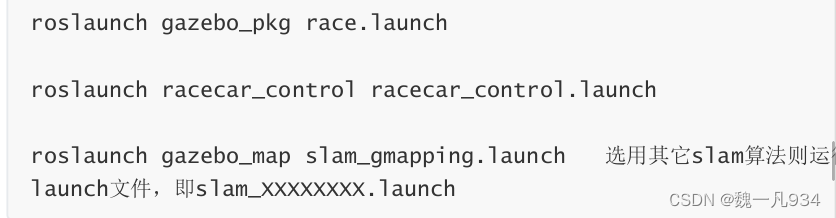
1、启动仿真环境,注意xml文件语法,主要是自己要看的懂launch文件
2、键盘控制小车
3、
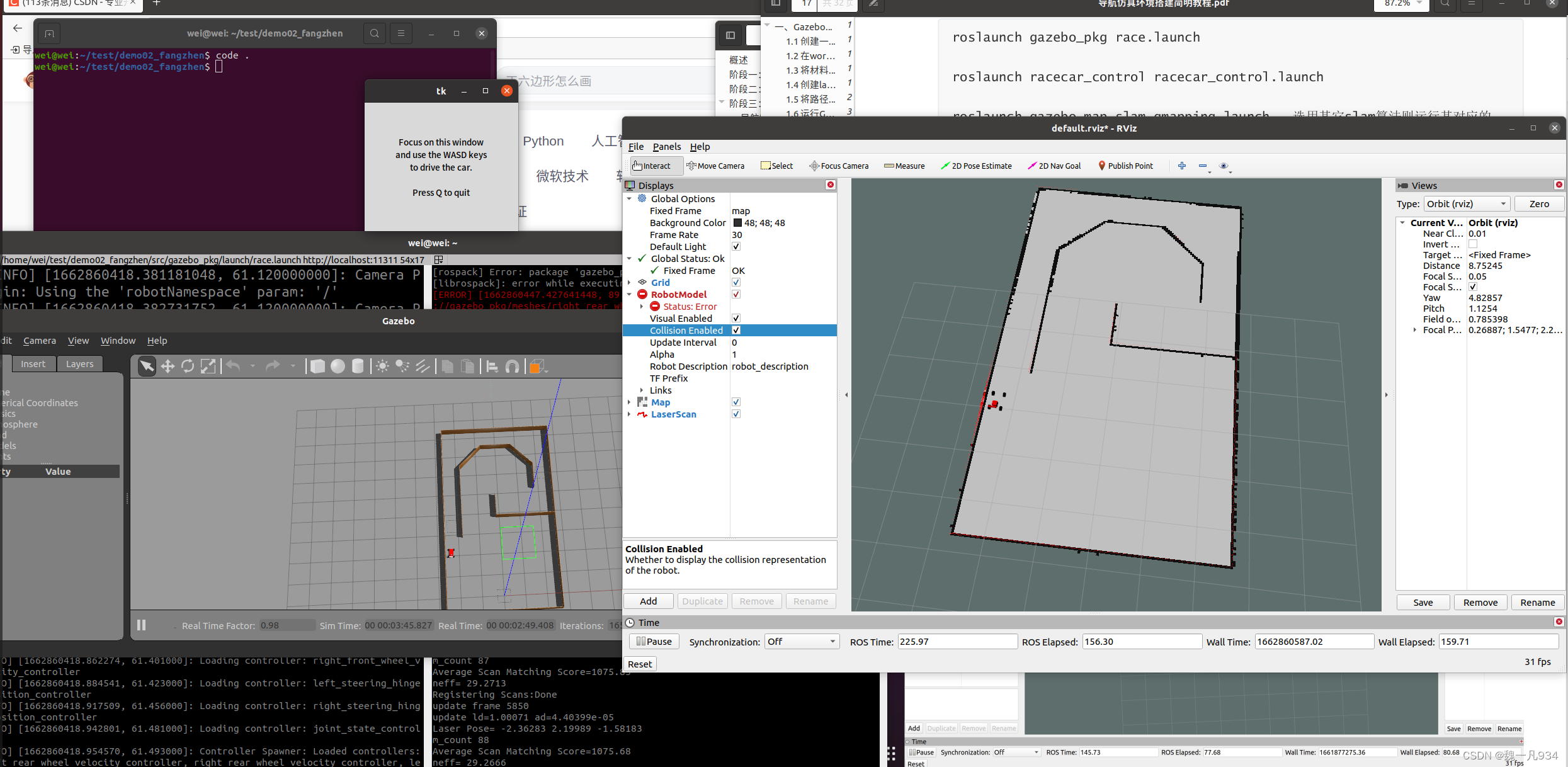
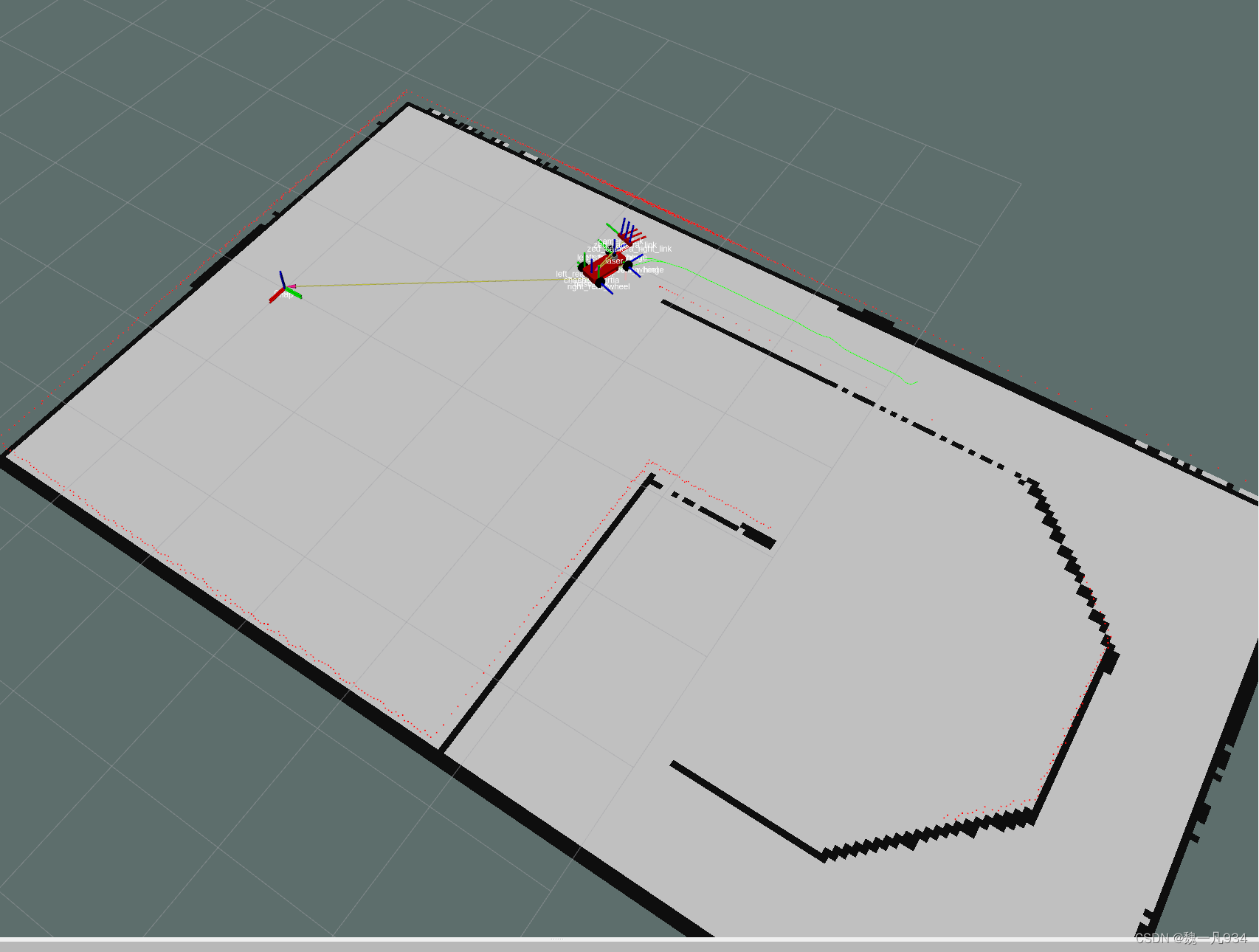
gampping建图,有问题,为什么不能显示整个车?
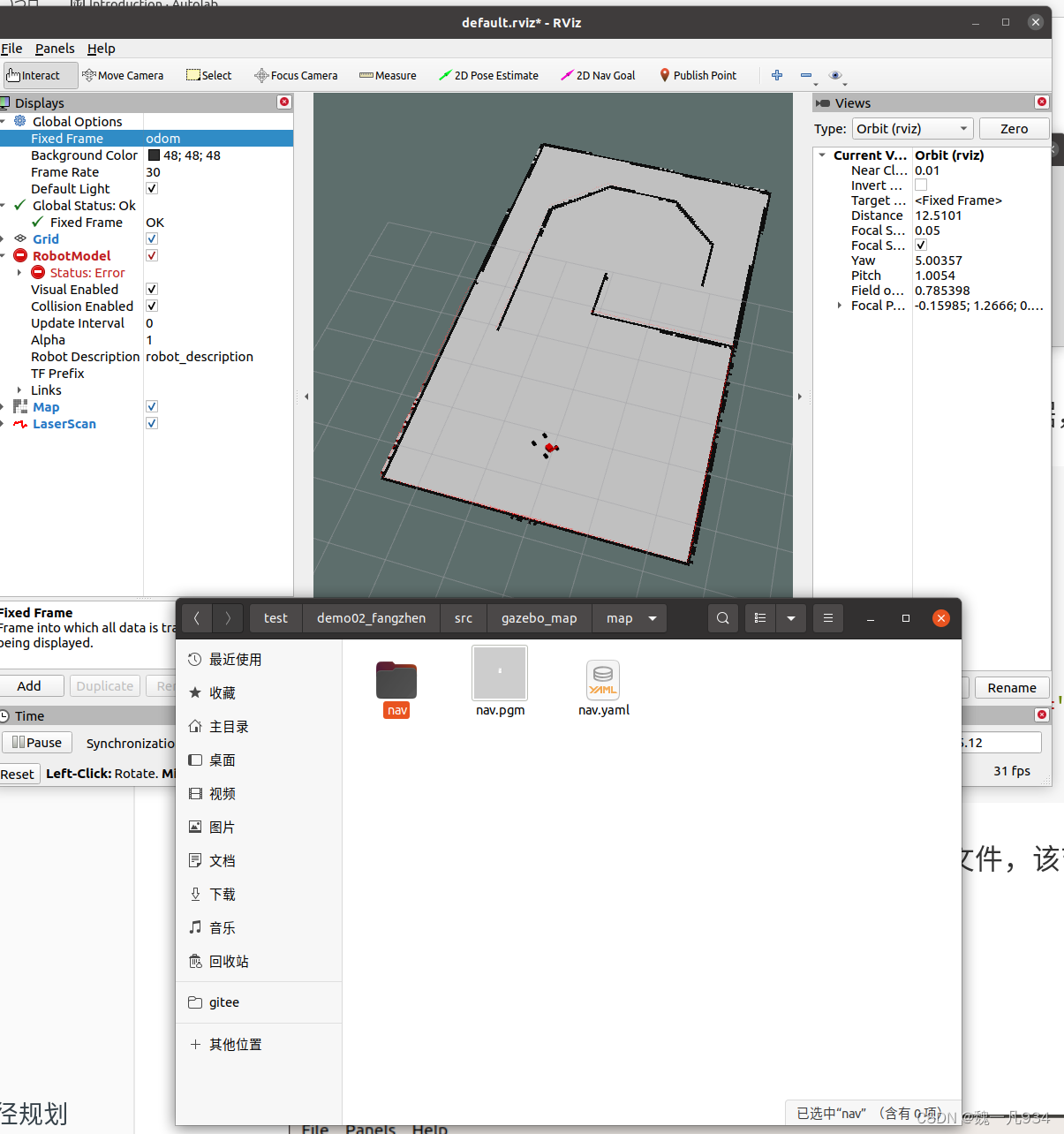
4、
保存地图


rviz在工作空间里开

只需要在rviz前加上source
PGM 是便携式灰度图像格式(portable graymap file format),在黑白超声图像系统中经常使用PGM格式的图像,文件的后缀名为".pgm"。
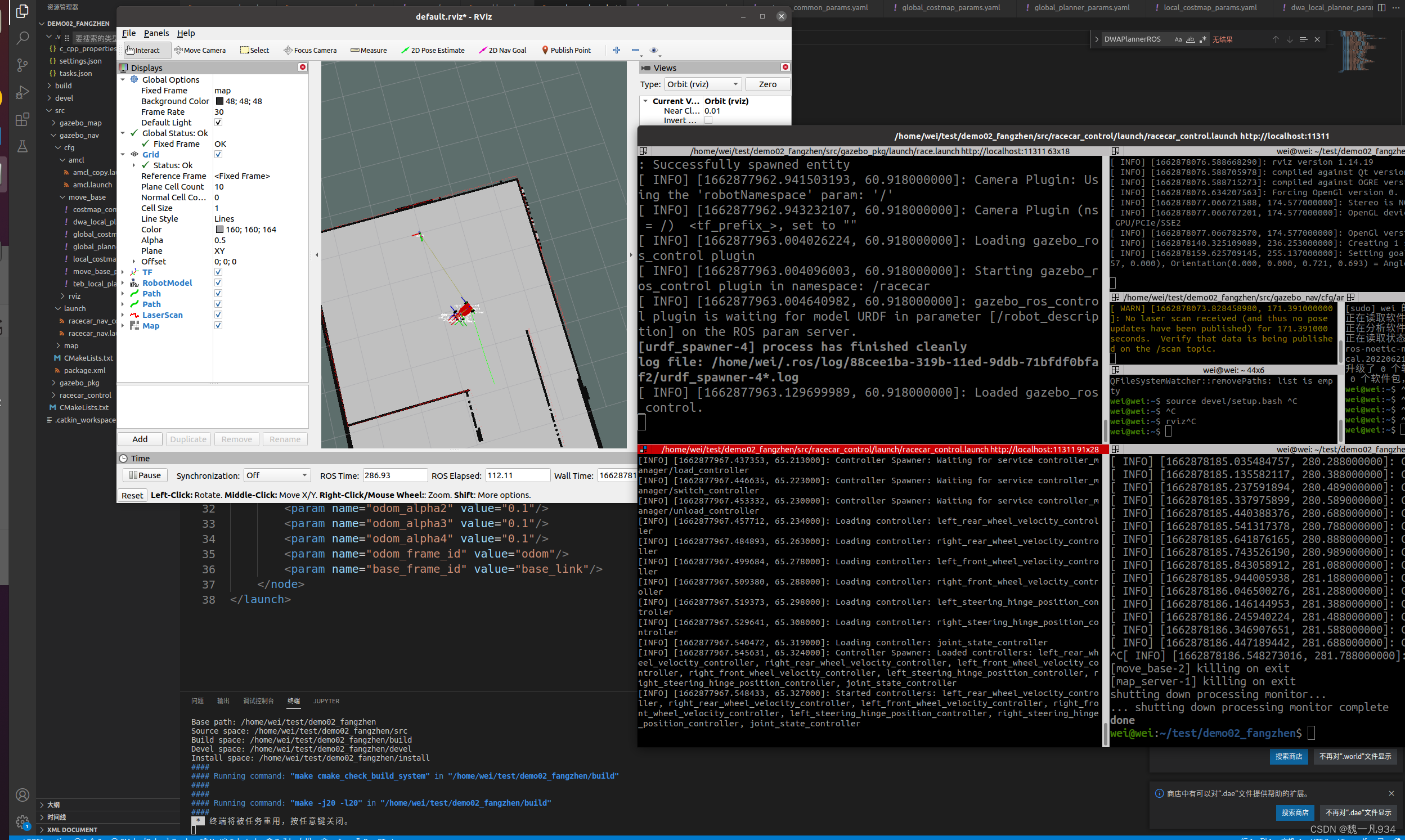
teb和dwa都可以实现,下面是编写绕场一周
2022.09.12

/move_base_simple/goal
查看类型

在rqt中初步验证数值准确性
编写cpp
贴个核心代码
goal[0].target_pose.pose.position.x = -2;
goal[0].target_pose.pose.position.y = 7;
goal[0].target_pose.pose.orientation.z = 0;
goal[0].target_pose.pose.orientation.w = 1;
goal[0].target_pose.header.frame_id = "map";
goal[0].target_pose.header.stamp = ros::Time::now();
ROS_INFO("Send Goal !!!");
ac.sendGoal(goal[0]);
ac.waitForResult();
if (ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED) //表示是否到达目标点
{
ROS_INFO("The Goal achieved success !!!");
i++;
}
else
{
ROS_WARN("The Goal Planning Failed for some reason");
}
最终能实现小车的自主绕圈导航(可多圈).















 528
528











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









