







一、
1、camera test
2、 mkdir不加sudo,会导致目录加锁,删除需要给每个目录添加权限(sudo chmod 777 目录名)
rm -r 目录
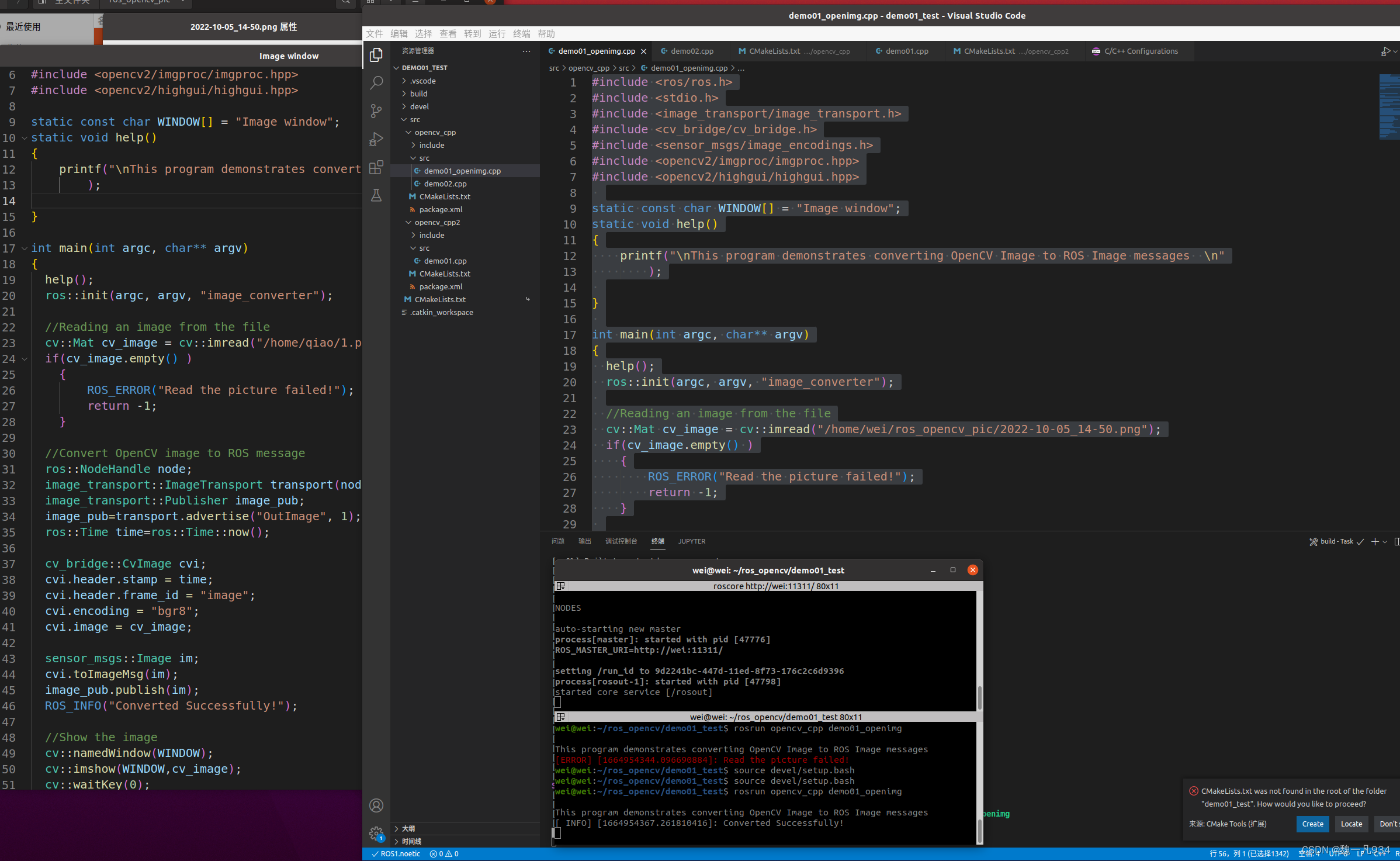
3、ros opencv(cpp)读取图像
包:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
OpenCV
cv_bridge
image_transport
)
头文件
#include <ros/ros.h>
#include <stdio.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>test file
#include <ros/ros.h>
#include <stdio.h>
#include <image_transport/image_transport.h>
#include <cv_bridge/cv_bridge.h>
#include <sensor_msgs/image_encodings.h>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
static const char WINDOW[] = "Image window";
static void help()
{
printf("\nThis program demonstrates converting OpenCV Image to ROS Image messages \n"
);
}
int main(int argc, char** argv)
{
help();
ros::init(argc, argv, "image_converter");
//Reading an image from the file
cv::Mat cv_image = cv::imread("/home/wei/ros_opencv_pic/2022-10-05_14-50.png");
if(cv_image.empty() )
{
ROS_ERROR("Read the picture failed!");
return -1;
}
//Convert OpenCV image to ROS message
ros::NodeHandle node;
image_transport::ImageTransport transport(node);
image_transport::Publisher image_pub;
image_pub=transport.advertise("OutImage", 1);
ros::Time time=ros::Time::now();
cv_bridge::CvImage cvi;
cvi.header.stamp = time;
cvi.header.frame_id = "image";
cvi.encoding = "bgr8";
cvi.image = cv_image;
sensor_msgs::Image im;
cvi.toImageMsg(im);
image_pub.publish(im);
ROS_INFO("Converted Successfully!");
//Show the image
cv::namedWindow(WINDOW);
cv::imshow(WINDOW,cv_image);
cv::waitKey(0);
ros::spin();
return 0;
}
效果:
注意cmakelist文件
set(OpenCV_DIR /usr/share/OpenCV/)
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
OpenCV REQUIRED
)















 2960
2960











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









