






一、TF坐标变换
transform frame
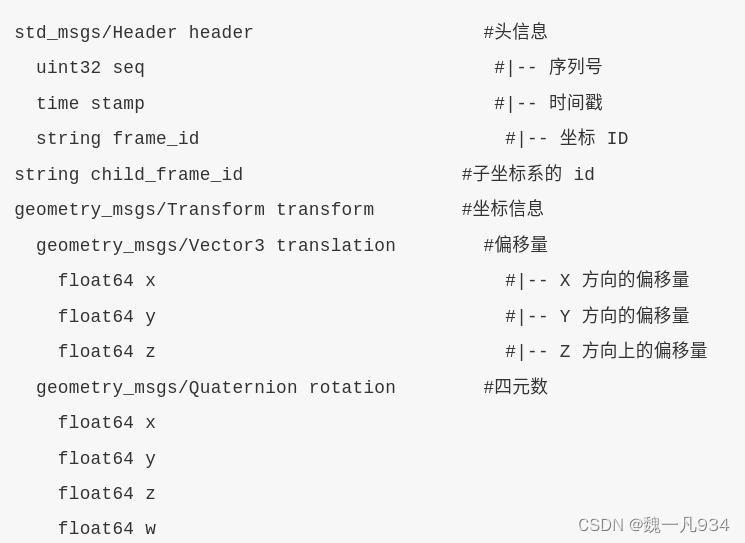
frame_id是被参考的坐标系,child_frame_id是另一个坐标系
translation代表child_frame_id相对于frame_id的偏移量
rotation代表child_frame_id相对于frame_id的偏航、俯仰、翻滚,和w(四元数)
静态坐标:底盘和雷达位置坐标
网格1m
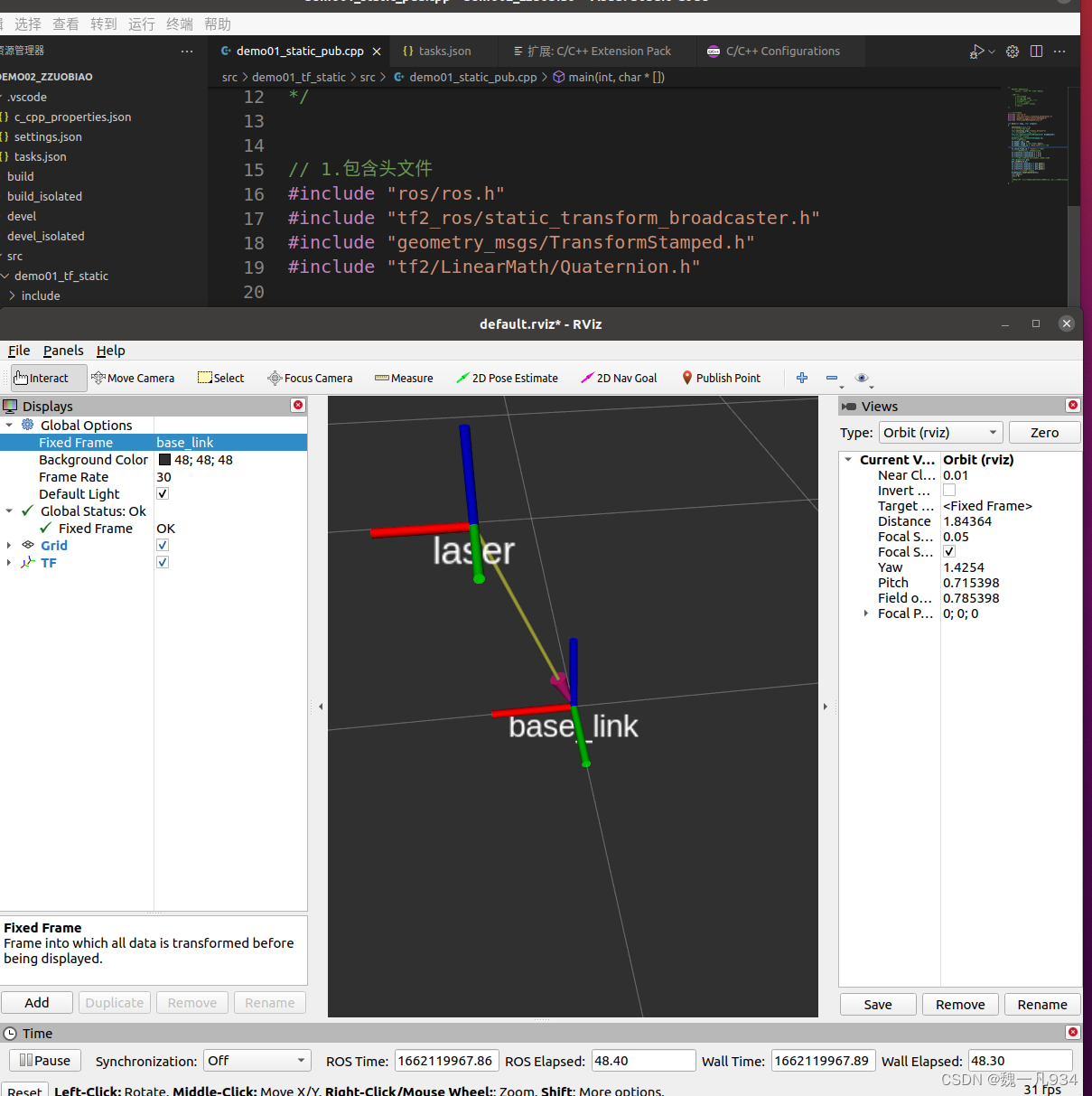
roscore->rviz->baselink->add tf
rostopic list
rostopic echo /tf_static
1、添加休眠 ros::Duration(2).sleep()
2、trycatch(java)
补充:
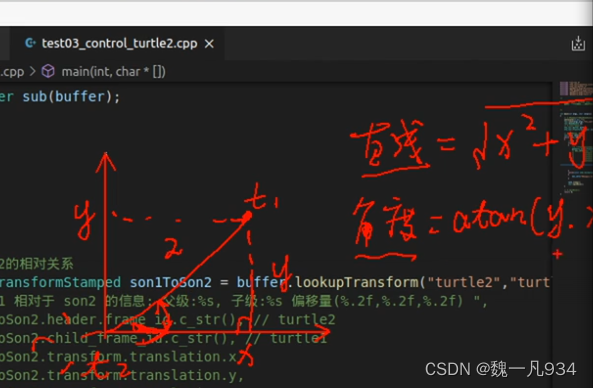
当坐标系之间的相对位置固定时,那么所需参数也是固定的: 父系坐标名称、子级坐标系名称、x偏移量、y偏移量、z偏移量、x 翻滚角度、y俯仰角度、z偏航角度,实现逻辑相同,参数不同,那么 ROS 系统就已经封装好了专门的节点,使用方式如下:
rosrun tf2_ros static_transform_publisher x偏移量 y偏移量 z偏移量 z偏航角度 y俯仰角度 x翻滚角度 父级坐标系 子级坐标系
示例:rosrun tf2_ros static_transform_publisher 0.2 0 0.5 0 0 0 /baselink /laser
也建议使用该种方式直接实现静态坐标系相对信息发布。
evince +pdf名->打开pdf文件
二、rosbag
rosbag是录制和回放ros主题的一个工具集
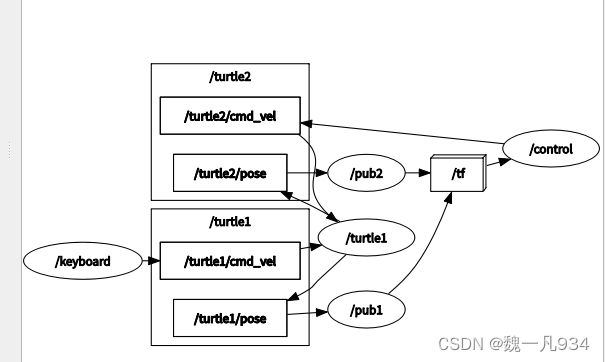
三、rqt
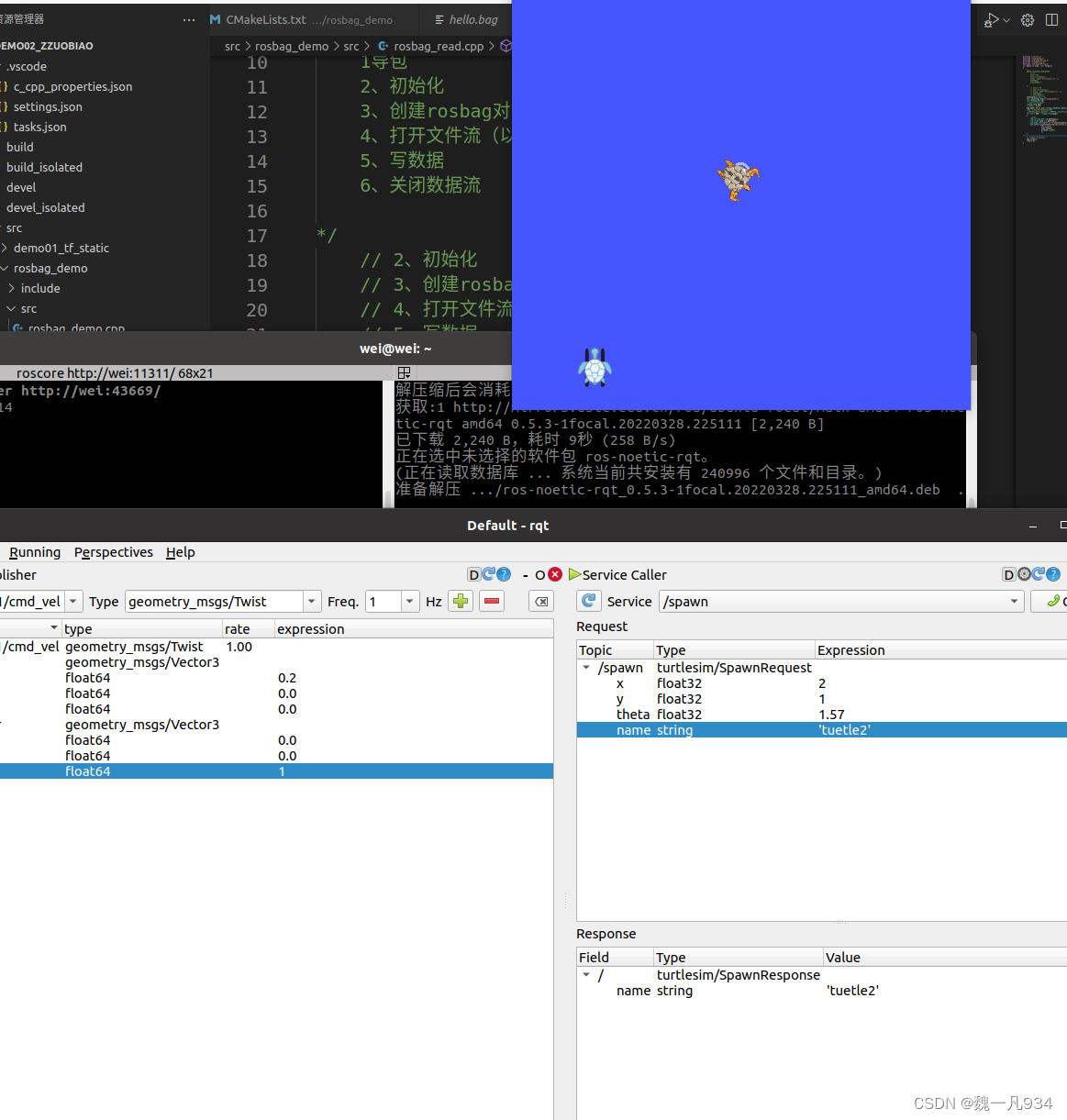
rqt-graph
圆圈是节点,方框是话题















 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









