






相较于另一个博客的更加完整版
前言:无人机目前不仅在商业应用上十分广泛,在院校的科研和比赛项目上都有很大的需求,接下来,我会尽我所能去介绍无人机,让大家更好的入门。
当然我的这部分知识比较浅显,我个人水平也有限,如果对您没有帮助,那很抱歉,我继续努力,不过还是希望有人能从我这里学习和了解到需要的东西。
一.硬件介绍
1.轴距380的四轴机架 *1
2.好盈40A电调 *4
3.电机 *4
4.分电板 *1
5.雷迅X7+ Pro飞控 *1
6.JESTON Xavier NX *1
7.英伟达 D435I 深度相机 *1
8.at9s 接收机 *1
9.at9s 遥控器 *1
- 固定件和配件若干
如果大家是第一次组装无人机,那么我推荐先买一个成品正常X布局的机架,有了经验再去制作新机架,没有钱可以把飞控的标准降,Pixhawk2.4.8是一个性价比很高的飞控
饭要一口一口吃,我们就先从无人机的核心,飞控来。
二.飞控介绍
1.飞控介绍
大家第一次做无人机肯定会有疑问,飞控是什么,它的作用是什么。我的理解是,飞控是无人机的大脑,它发布各种指令来控制电机转速,以此来移动无人机;同时它还可以读取各种传阿感器的数据来帮助飞控判断。
另一个我就以雷迅飞控为例从另一个方向介绍
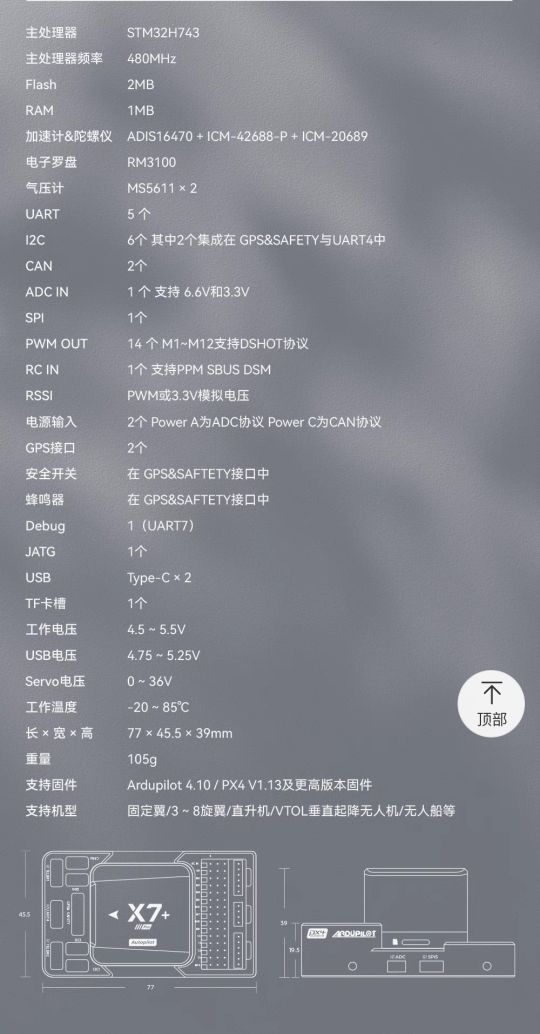
我们可以看到雷讯飞控。其实是一个以STM3H7芯片作为主处理器。然后附带一系列传感器,比如罗盘、气压计、加速度计。以及GPS外接等传感器。
做过单片机项目的可能有所了解,就是比如说32单片机可以通过引脚和接口,外接一个传感器,比如说超声波测距,然后我们再在单片机烧上对应的测距代码的,使超声波开始运作,飞控其实就是一个性能更高的单片机芯片,再加上一堆传感器,集装好成为一个飞控板。
那么就引出来一个问题,飞控肯定也需要一个东西,比如说代码去运行,但是对于飞控只有一个比较集成化的一个元件,都需要一个更加庞大的,一个项目代码去运行,也就引出我们的下一个话题:固件。
2.固件介绍
(1)前言
从我现阶段如果对固件下一个定义的好,我更愿意称他是一个项目代码。
这里面包括很多部分,以PX4为例的,可能对于各个传感器都会有一个对应的一个文件,里面存放该传感器的代码。同时。你在遥控器上使用你的模式甚至功能都会在它的项目里面有一个对应的一个模块,他也会有一个集成各种传感器数据的模块,去控制无人机。
(2)PX4和APM
目前来说,主流开源的飞控有两类:PX4和APM。从我自己的使用经验来看:对于你要使用多旋翼或者进行自主流程的话我推荐使用PX4固件。如果简单的固定翼飞行我推荐APM固件。
pixhawk、px4、APM、ArduPilot这四个的关系如何呢?
pixhawk是硬件平台,PX4是pixhawk的原生固件,专门为pixhawk开发。

APM(Ardupilot Mega)也是硬件,Ardupilot是APM的固件,所以称ArduPilot固件也叫APM。

(3)两者的联系
后来APM硬件性能不太够,所以APM固件也就针对兼容了Pixhawh硬件平台。所以在pixhawk硬件平台上可以运行PX4固件(原生固件),也可以运行APM固件。目前已经买不太到Ardupilot系列飞控,主流使用的还是pixhawk。如:雷迅公司开发的飞控,多是基于pixhawk平台。
以两者使用的地面站为例:QGC地面站是PX4固件的御用地面站,MP地面站是为APM固件开发。目前来说QGC和MP均已经适配PX4和APM固件,但是MP地面站刷写PX4固件的体验感还是很差。总的来说,无论你使用哪个固件,我都推荐QGC地面站,放下MP地面站的历史包袱。
(4)两者的特点
APM固件Ardupilo最初是基于arduino搞的,其程序比较混乱,零散。维护者多,代码风格不太统一,而且是单片机这种调用程序,不好入门。但是成熟稳定,支持硬件多。
PX4固件开发时间较晚,历史包袱少,使用更先进的架构。采用多任务,模块化设计。相对来说方便入门,代码风格比较统一。近几年PX4支持的硬件不断增多,更多厂商也基于pixhawk平台去开发,实际上PX4的成熟性和稳定性已经不属于APM,甚至略胜一筹。
(5)我使用过的飞控
应该说目前一些对自主智能系统研究比较深的学校,都有自己的飞控固件甚至适配的飞控。但是我们肯定是没有的,下面👇请看吧
CUAV X7+,CUAV X7,CUAV V5+,CUAV V5,雷迅的飞控总的来说,价格高(目前没货,v5+都3500,价格是虚的),飞控稳定性还可(至少我用到现在没有因为硬件问题出错),有自己的适配硬件(gps,rtk),技术支持服务还可以。可能我还没试验出它的全部功能,所以觉得它的价格对比性能不太美丽。总的来说,国产厂商做的不错的,大家也没得选。

pixhawk 2.4.8飞控,我觉得是性价比之王了,500块钱的价格,基本的适配硬件也都有,进行试验完全没问题。

匿名飞控,这个是我出去比赛才知道的,商品介绍说飞控可以通过实现自动飞行,拥有自己的软件地面站,bug也比较多,不过上手难度小,本科生的电赛利器。

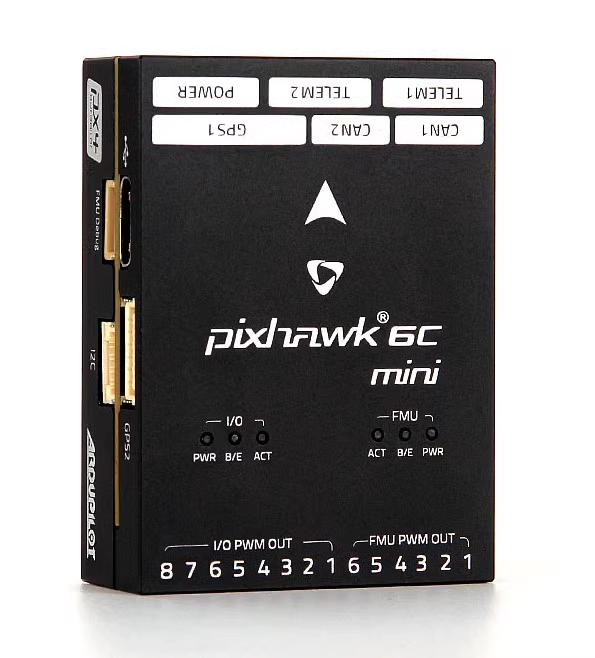
pixhawk 6c mini PX4自己出的飞控,主打一个小型,但是各项功能也都很齐全。
3.飞控固件的烧写、地面站的使用.
这里我更推荐QGC地面站,好用,简洁,旋翼无人机主要使用地面站。
打开界面如下,我这里是ubuntu系统,与Windows使用效果是一样的
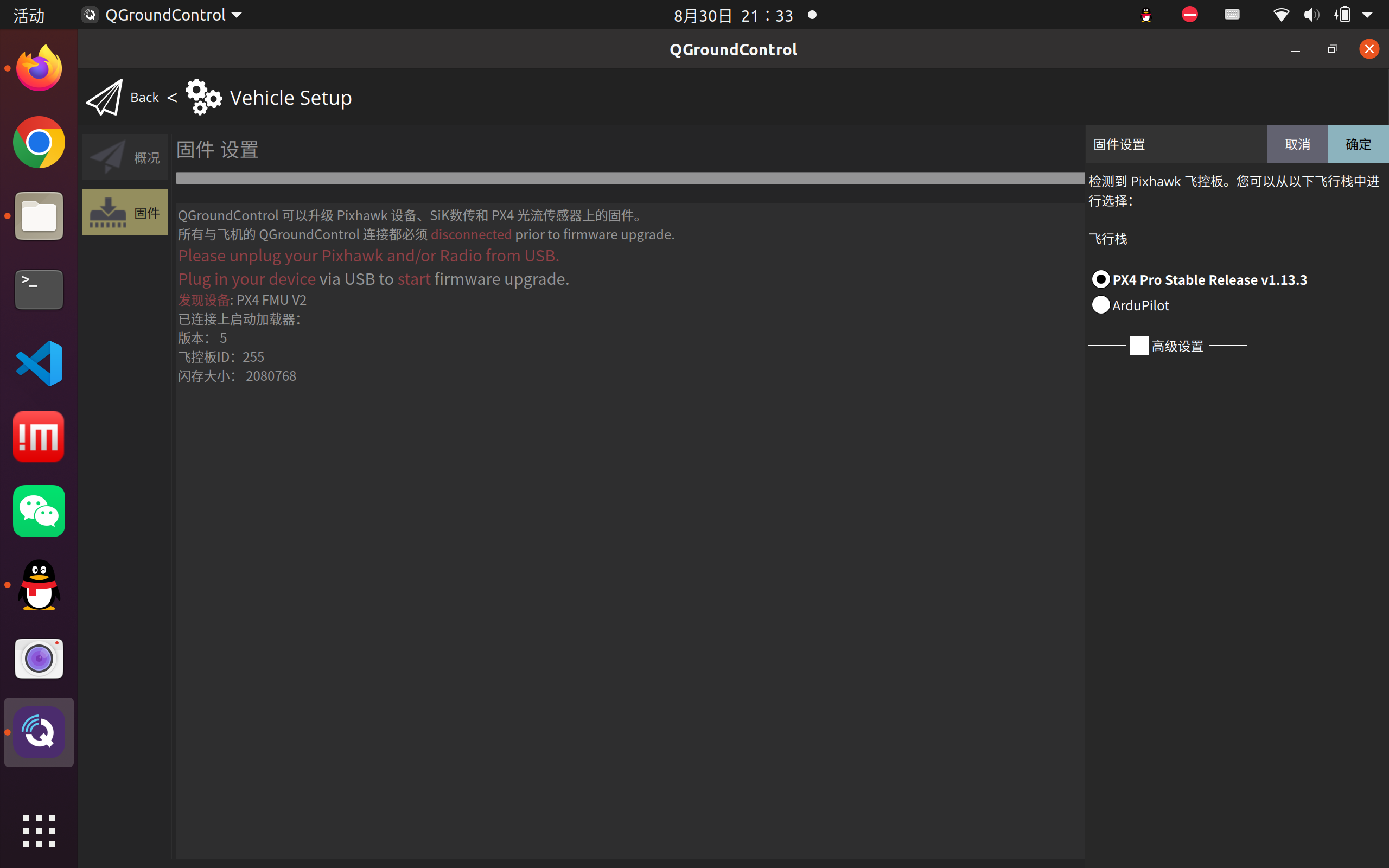
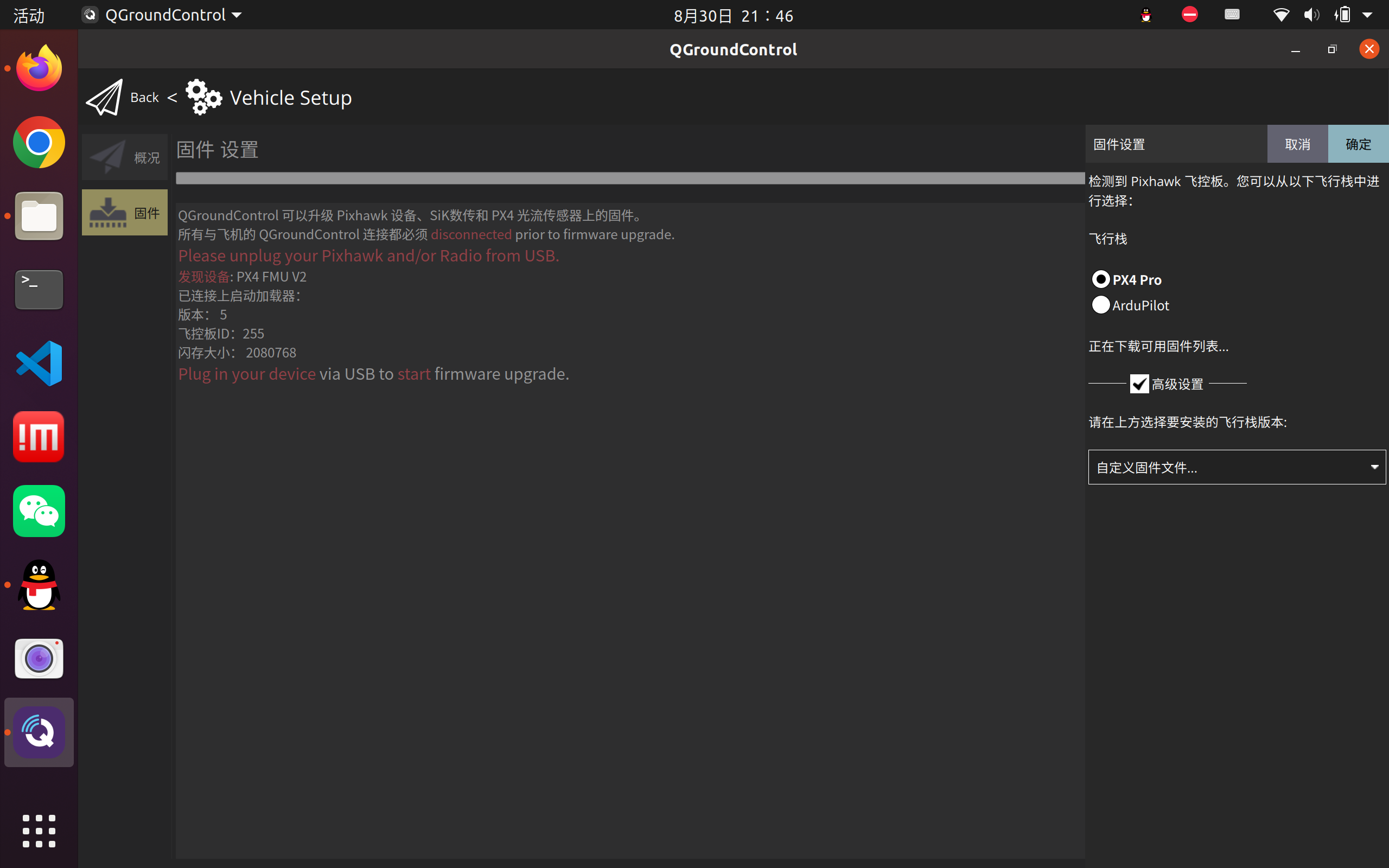
(1)地面站烧写固件
拔插USB接线,出现这个界面
这里PX4下载的是最新版固件,如果想要下载其它版本的
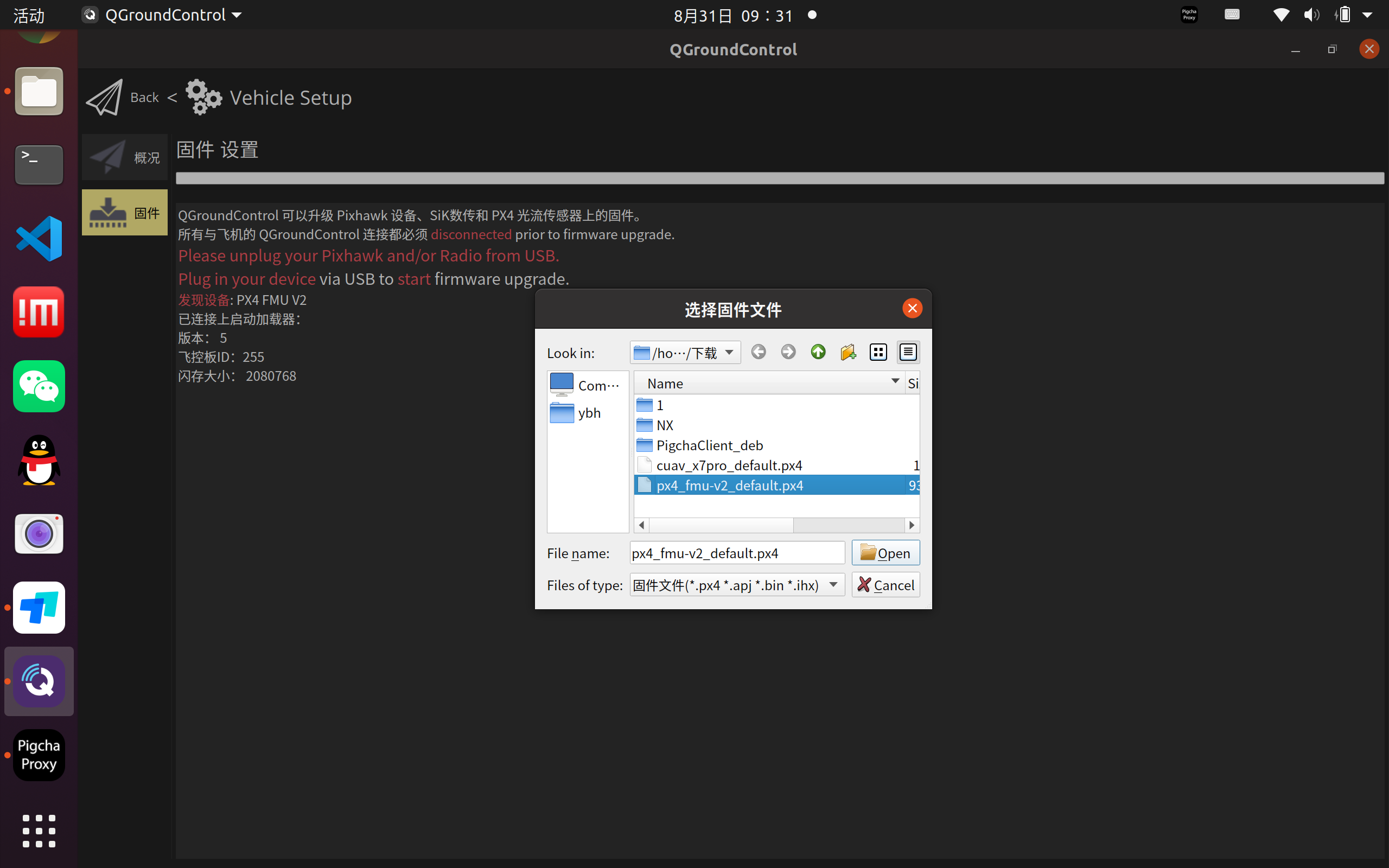
出现目录找到你提前下载好的固件
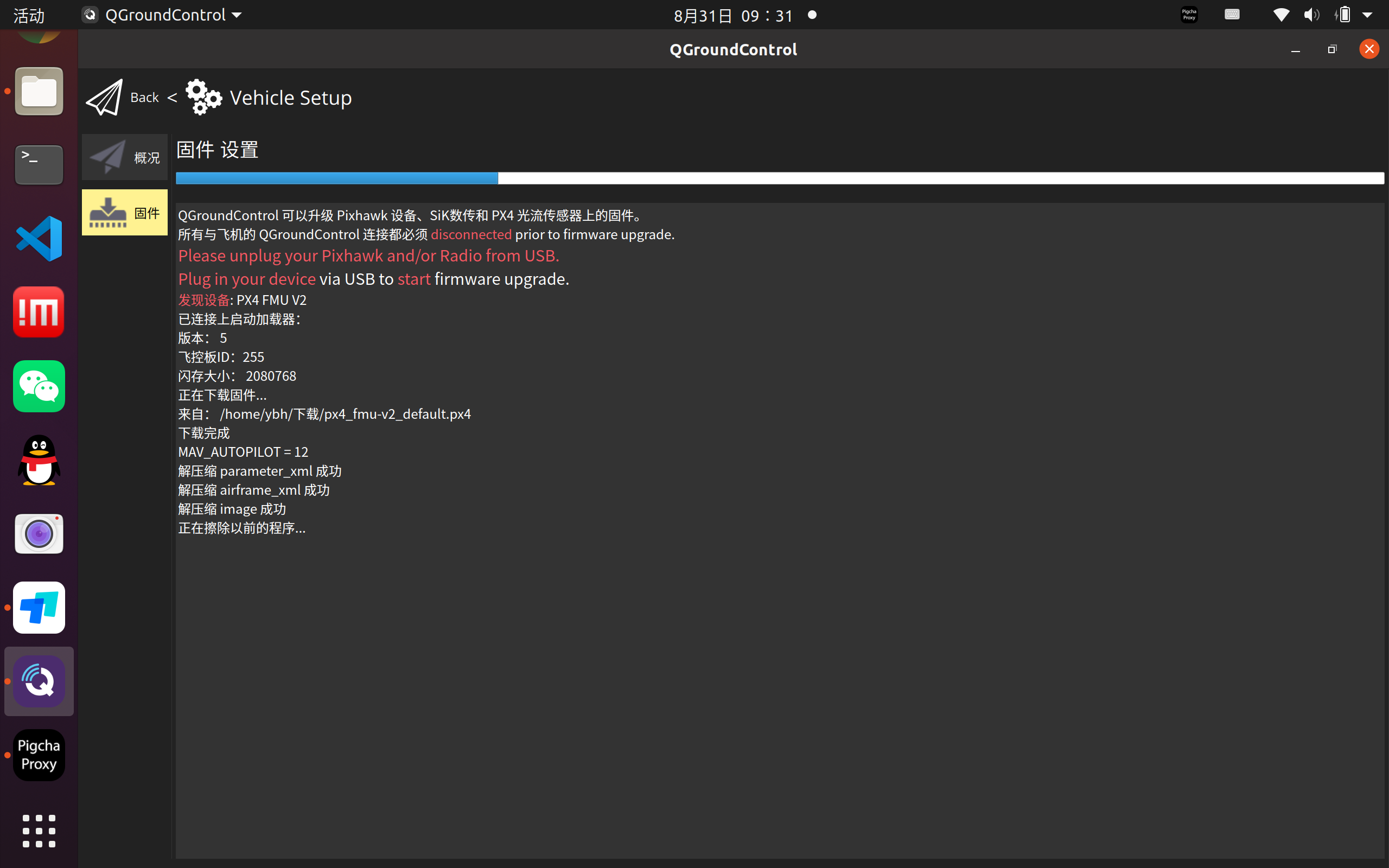
开始烧写
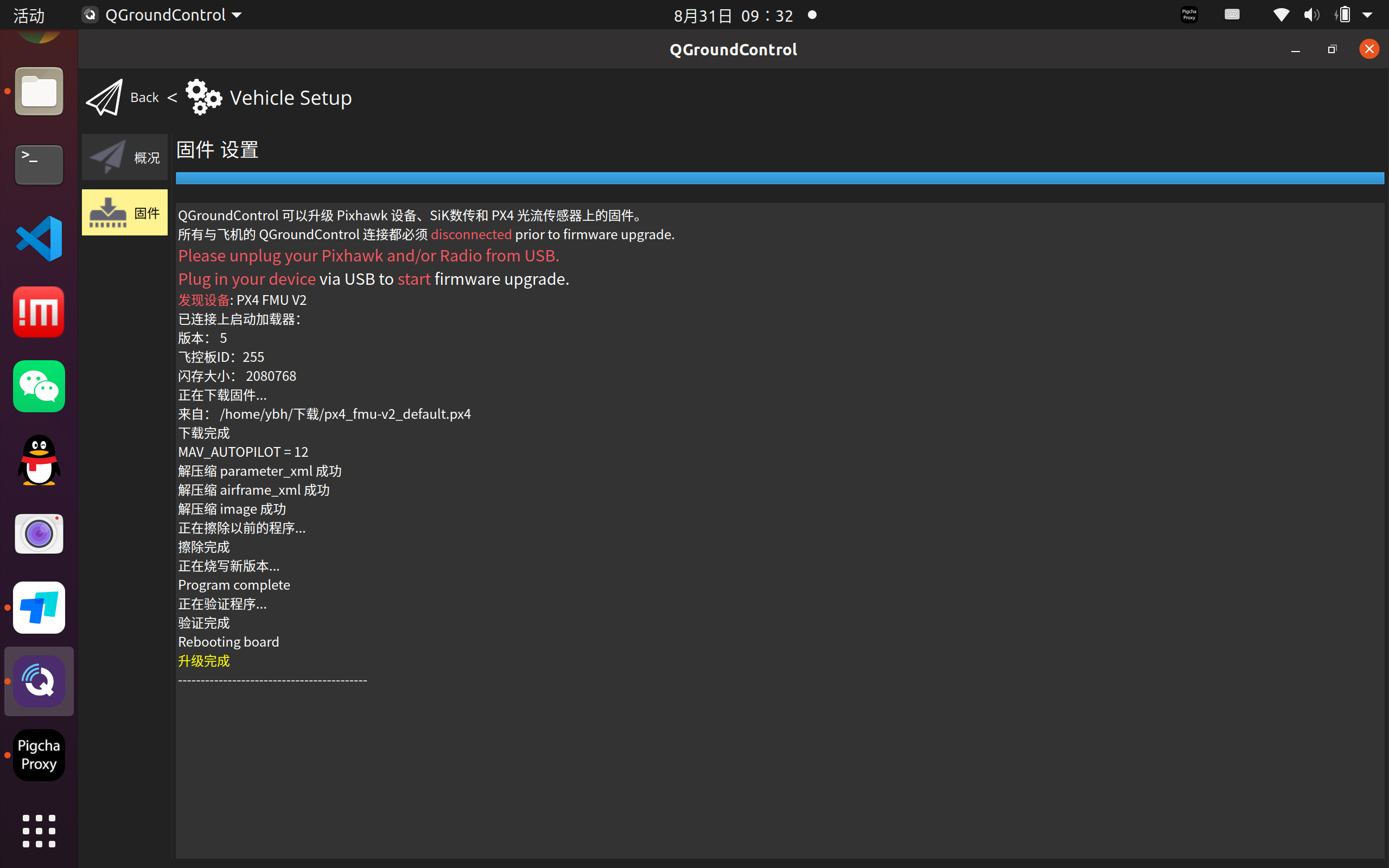
烧写完成
(2)下载固件
stable 代表的是稳定版本,我们可以下载这个,一般来说正常飞行,即使是最新稳定版本的PX4是没有问题的,稳定版会在二次开发中有一些bug,因此二次开发一般下载别人试验成功的版本、时间更早的稳定版本。
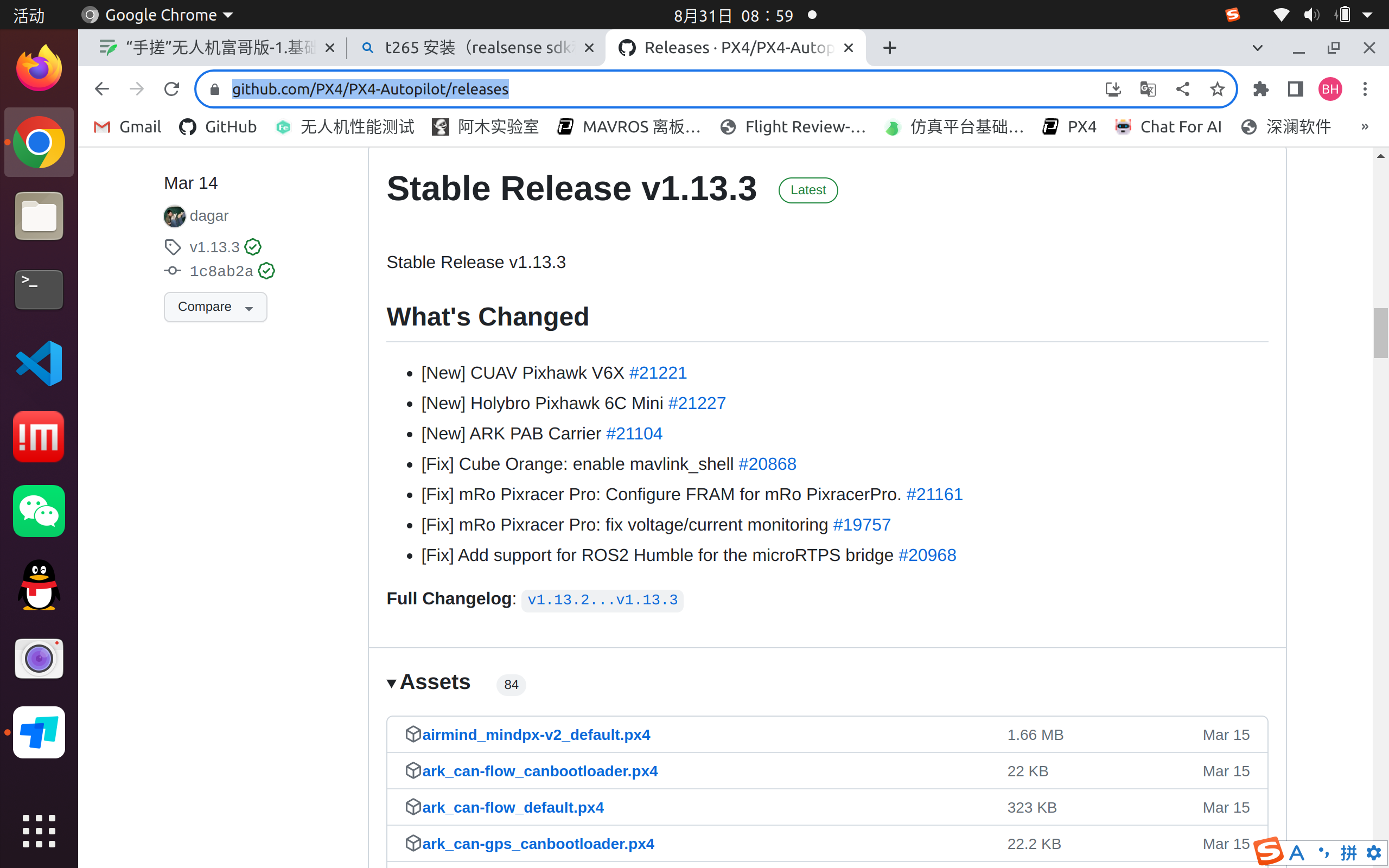
beta 就是测试版本,并且这几个也没有不同设备对应的固件,不用下载。

我们以stable v1.13.2为例,可以看到它有很多固件
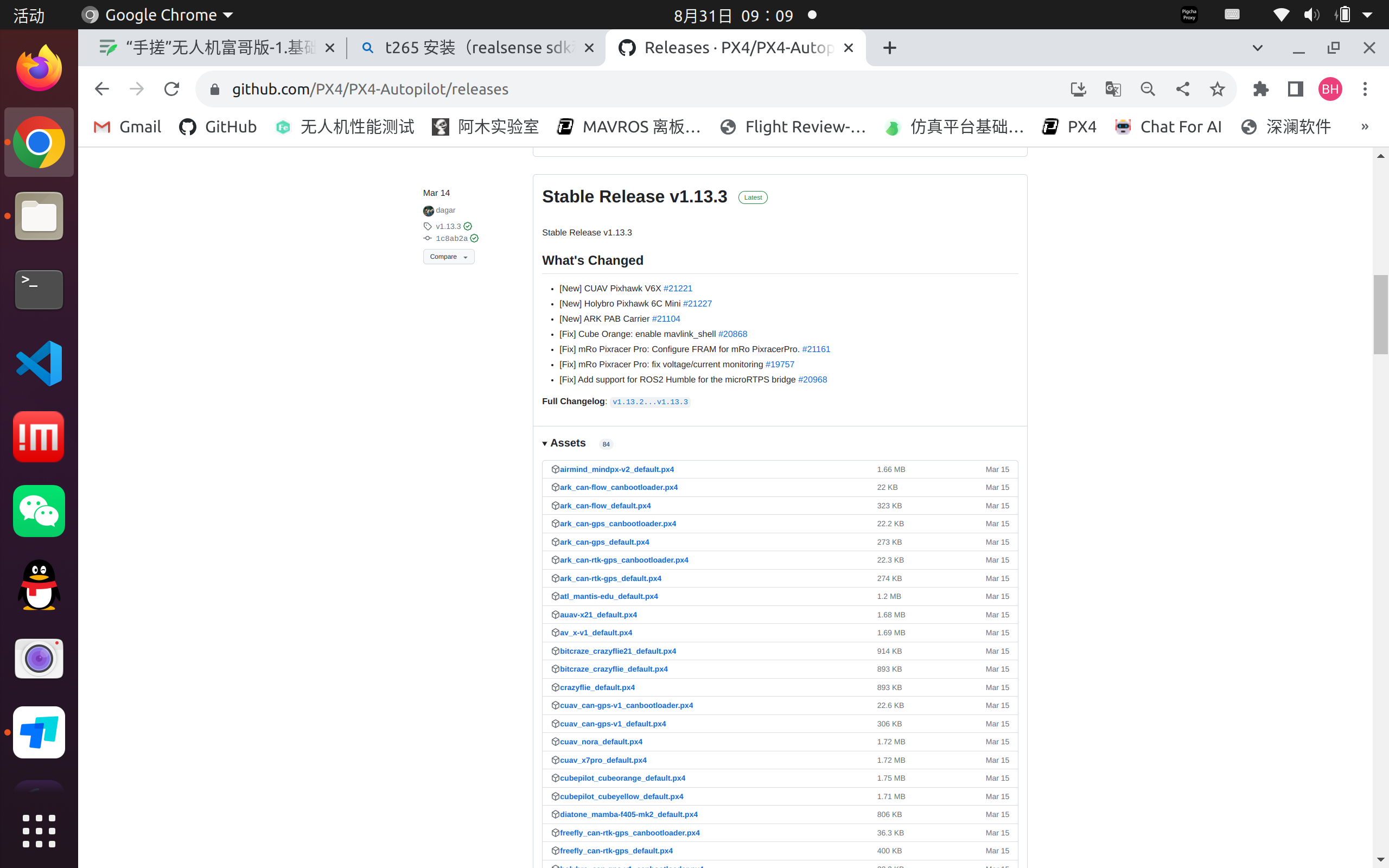
种类繁多,80多种,我们如何确定我们的固件,问客服当然是可以的,但是我们还是要靠自己,我给大家讲述一下我的方法。
还是打开地面站,调出刷固件界面,看会有一个发现设备:
PX4 FMU V2
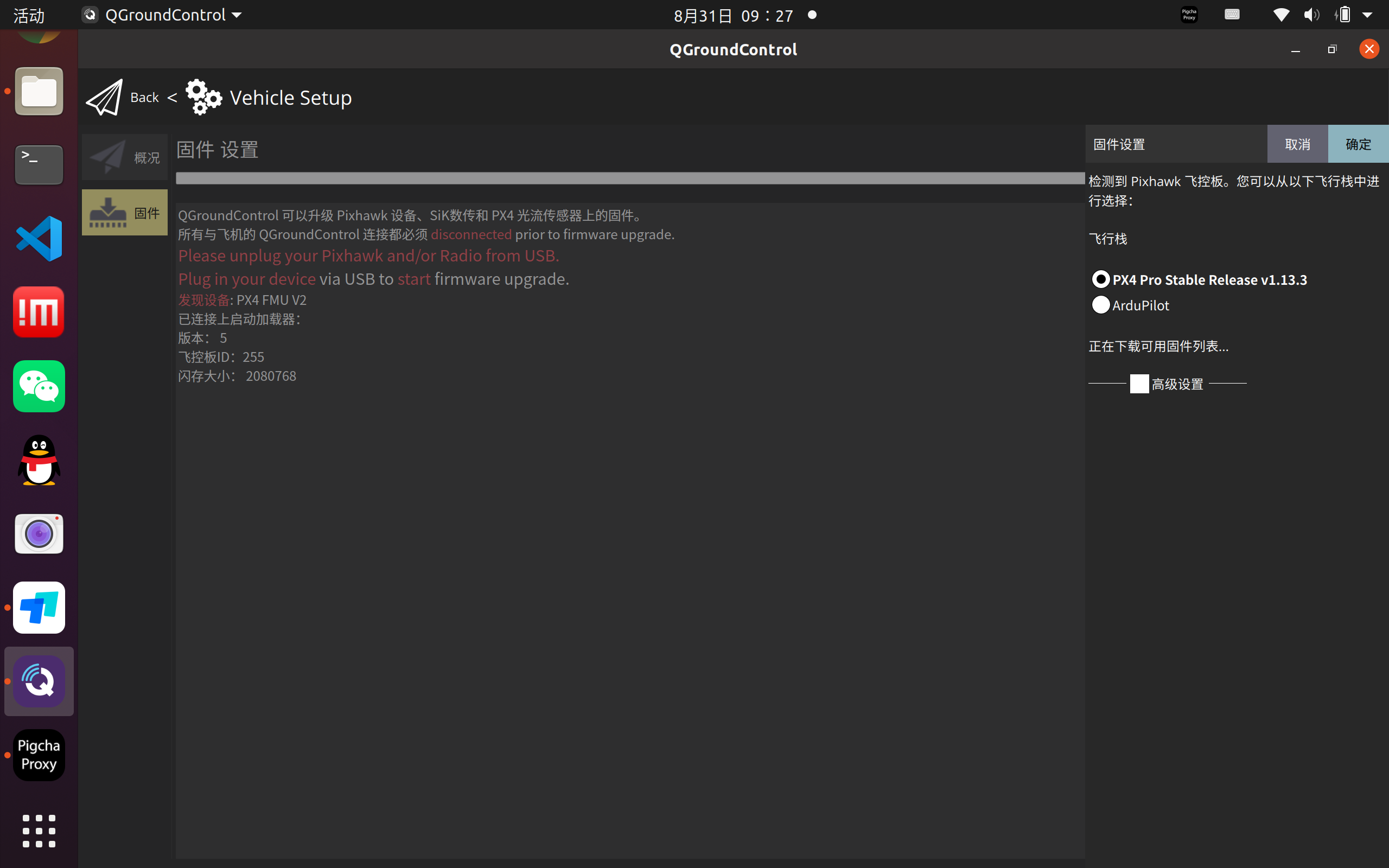
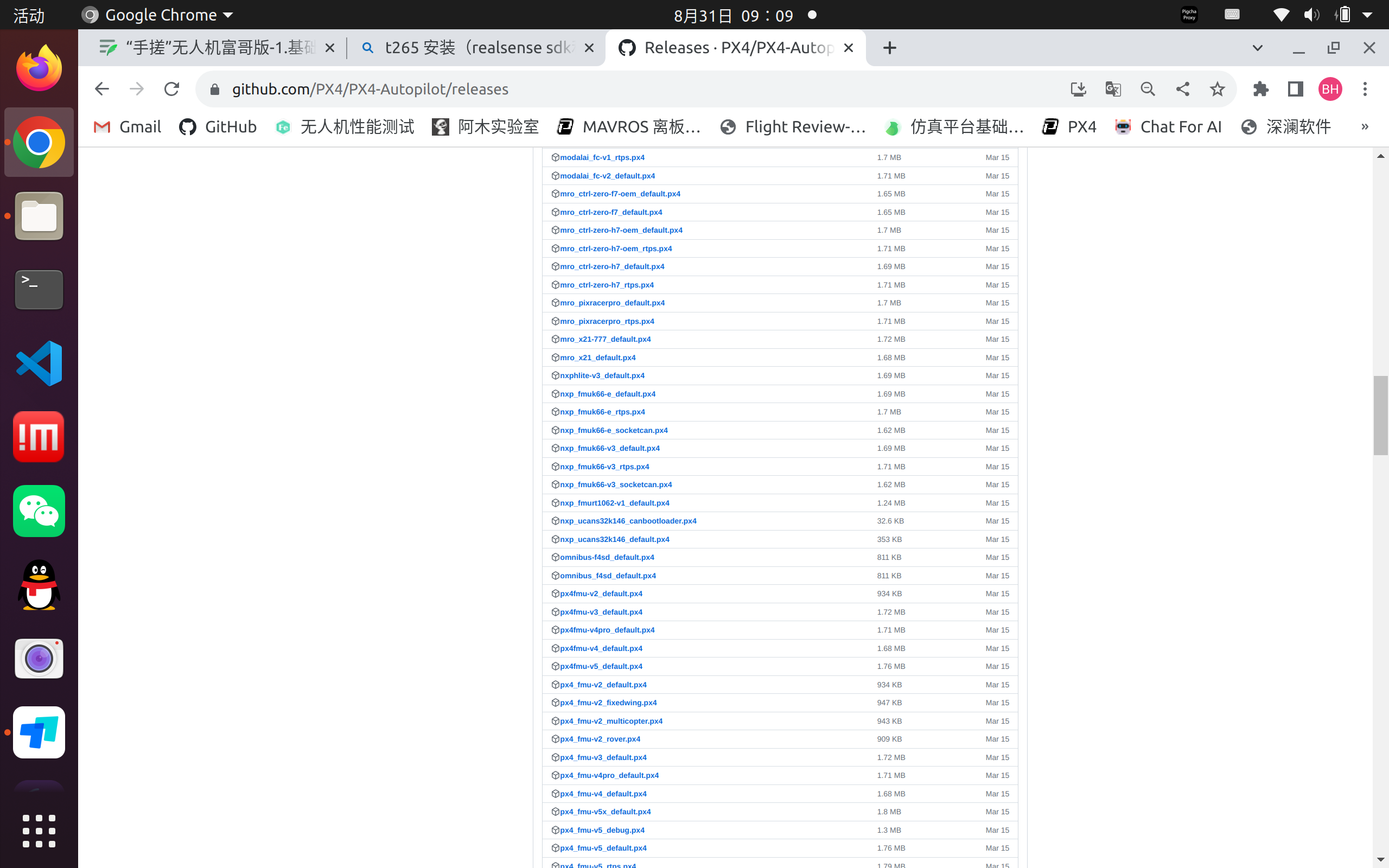
我们再去看网站的固件列表,找到PX4 FMU V2 default.px4
固件下载
剩下的就是烧写固件了。
(3)地面站使用
a.界面介绍
每一个刚开始使用qgc地面站,都找不到调参界面在哪,刚开始我们进入是这样的界面
我们点击左上角图标那里,出现这个界面
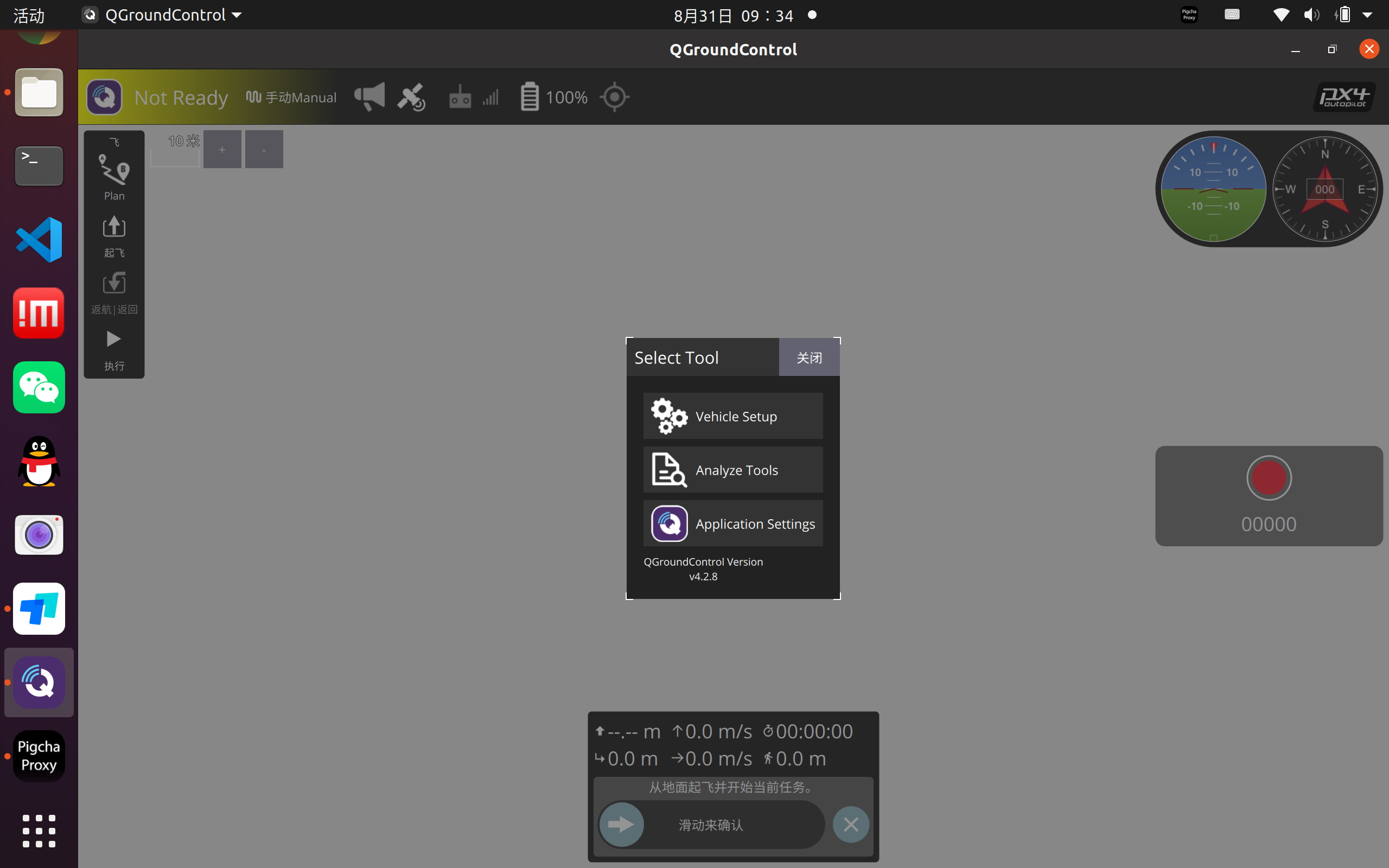
点击第一个,vehicle setup,进入界面如下
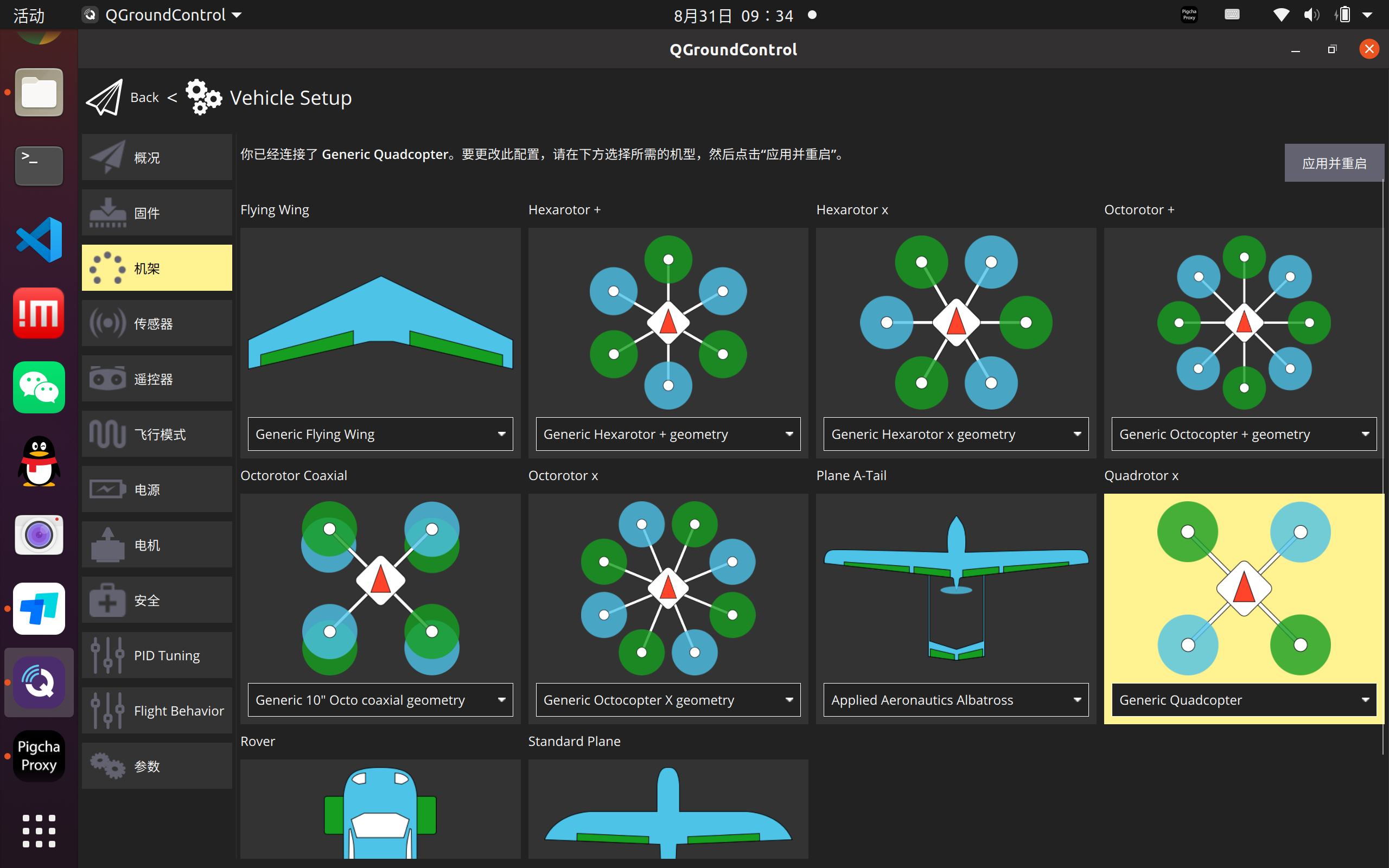
我们先点击机架,选上自己对应的机架,机架种类与固件版本、飞控支持与否都有关,雷迅x7+ pro 就很多,当然很多都是用不上的,有四旋翼即可。选好后点击应用并重启
b.传感器校准
再次进入,点击传感器
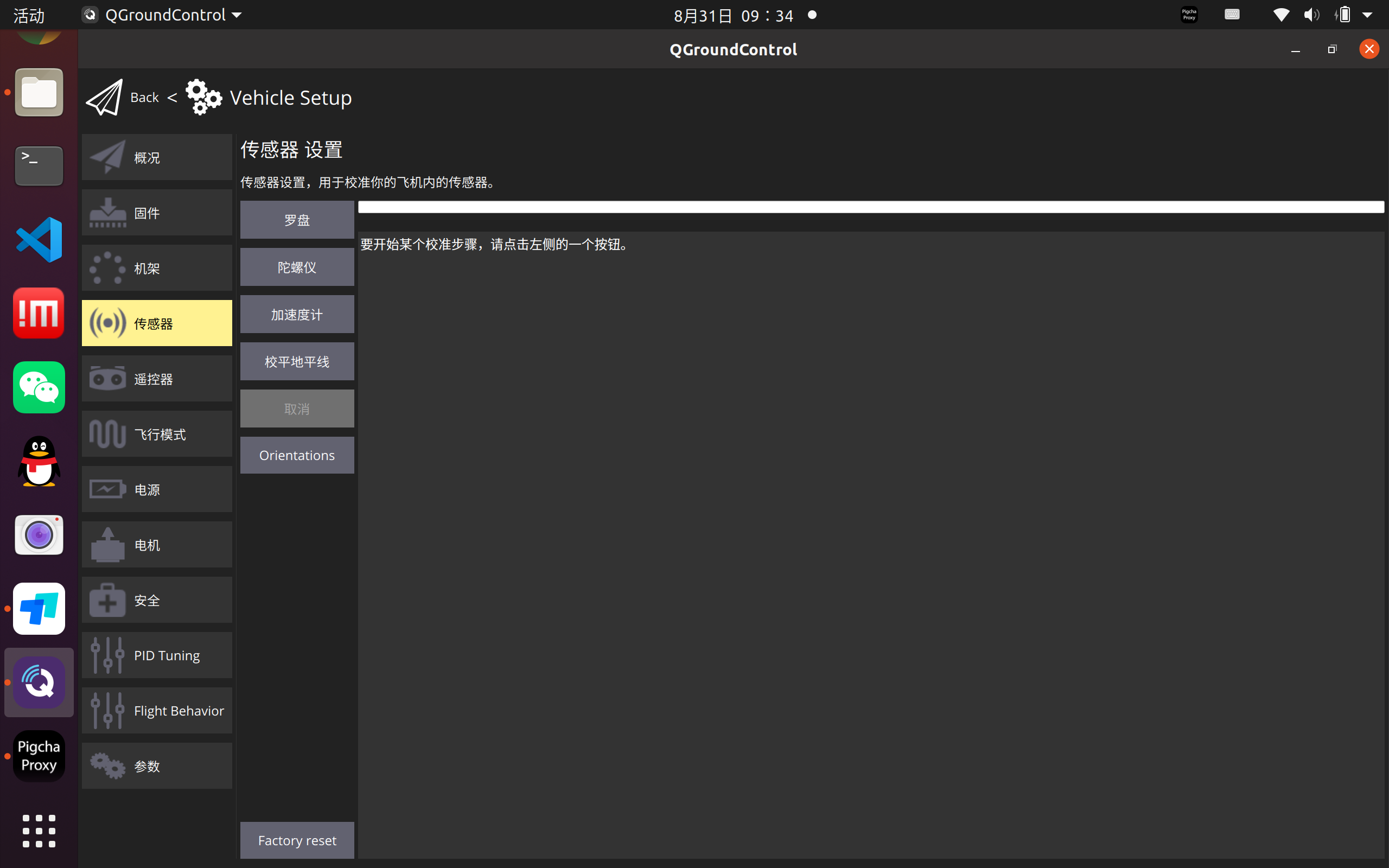
主要校准罗盘、陀螺仪、加速度计
注意:不要点击orientations,这个是设定方向的,会对起飞解锁有干扰。
b.1 罗盘校准
保持以下参数默认,点击确定
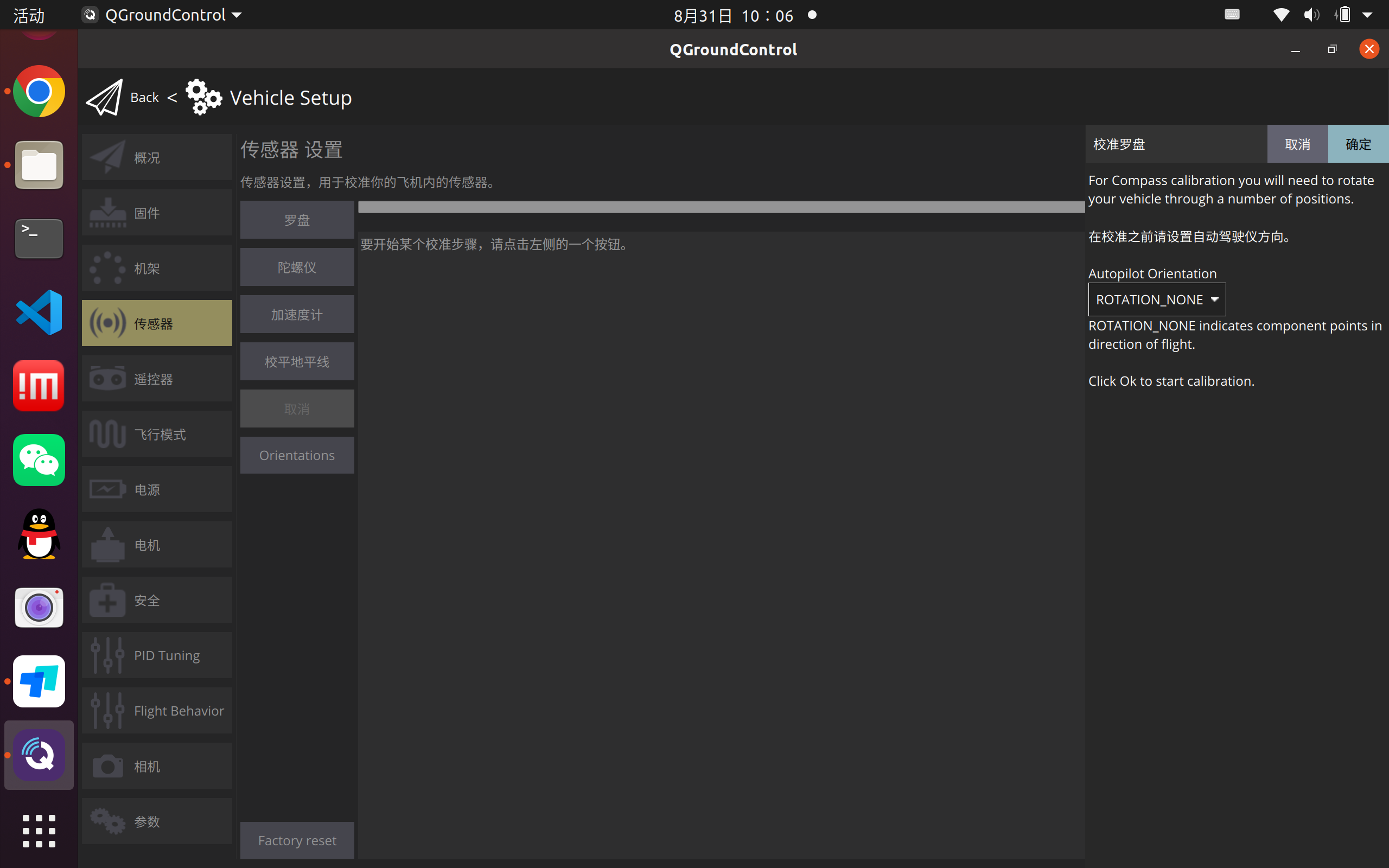
飞控都有箭头,箭头指向就代表机头方向
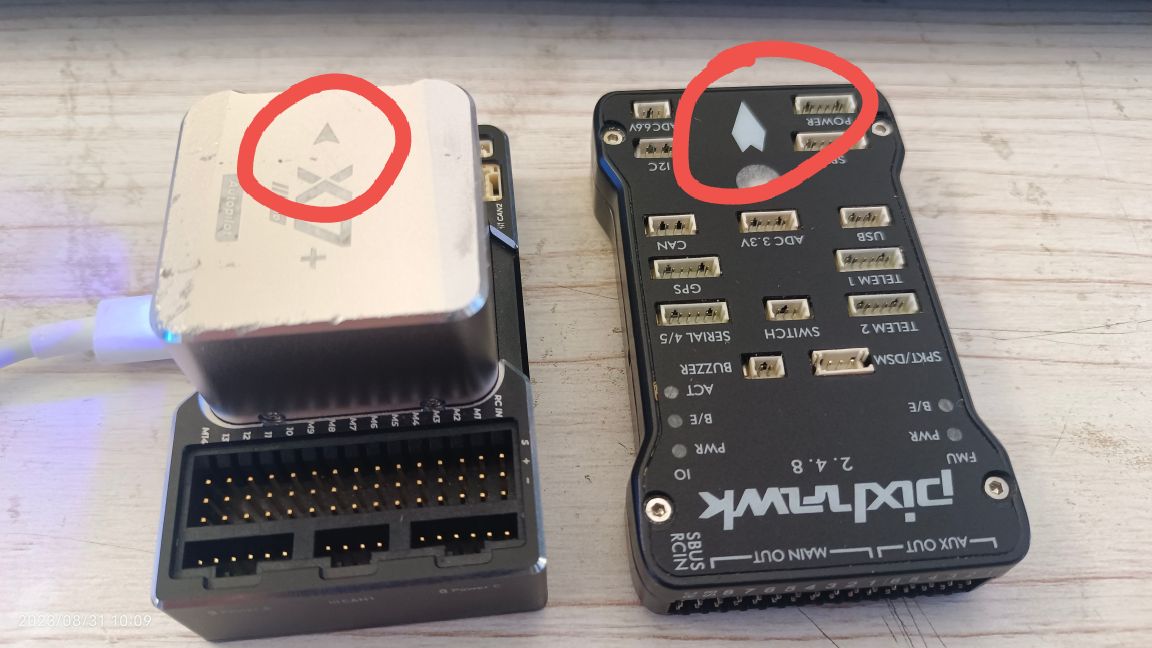
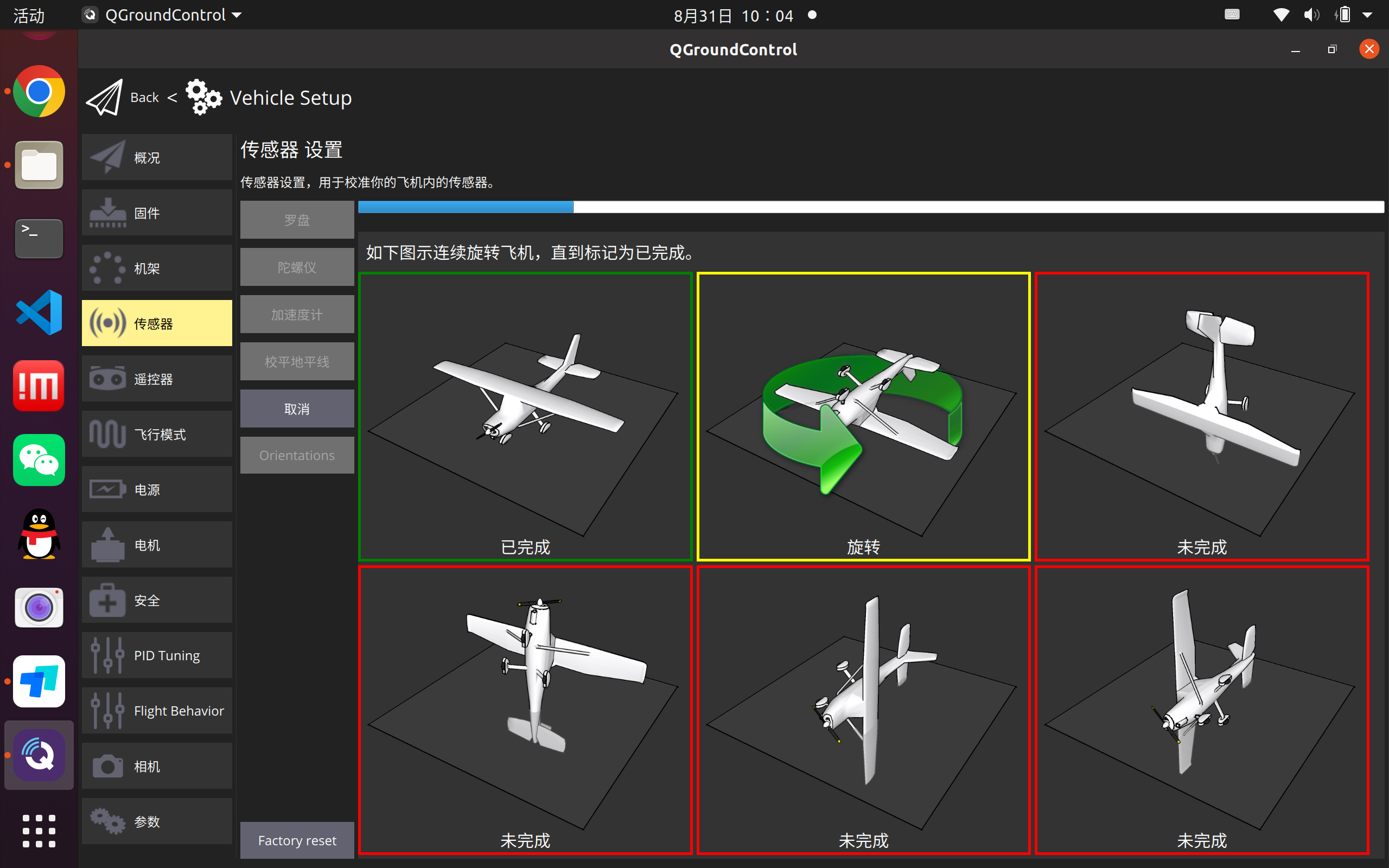
以飞控机头为基准,将飞控放置到如图六个方向,静置1-2s,会出现黄色旋转提示,注意的是保证方向不变,水平顺时针旋转,直到该方向变绿;继续操作,完成全部操作。
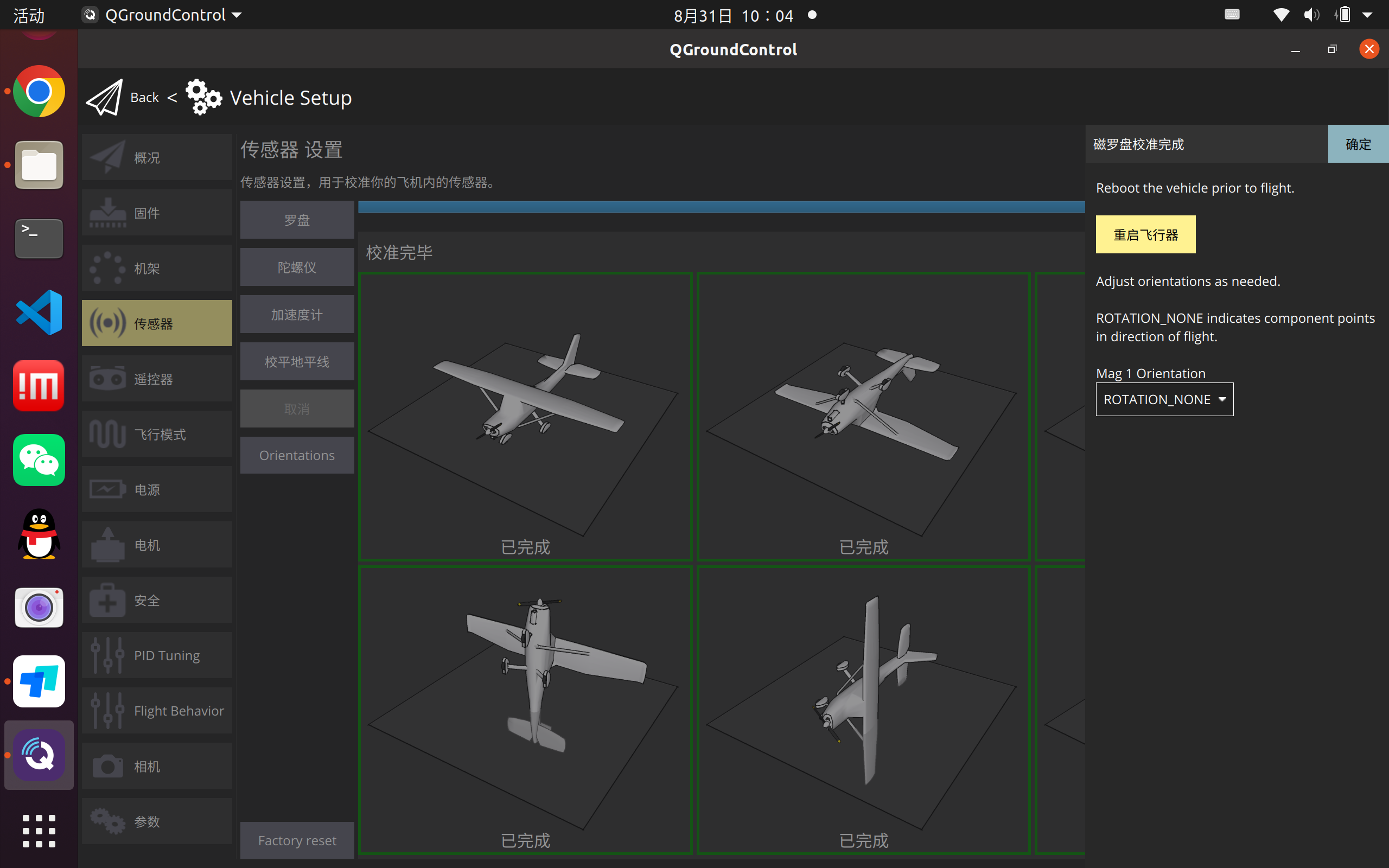
我们全部校准完成后,会弹出如下图所示界面,一定点击重启飞行器,然后我们飞控重启,罗盘就校准完成了。
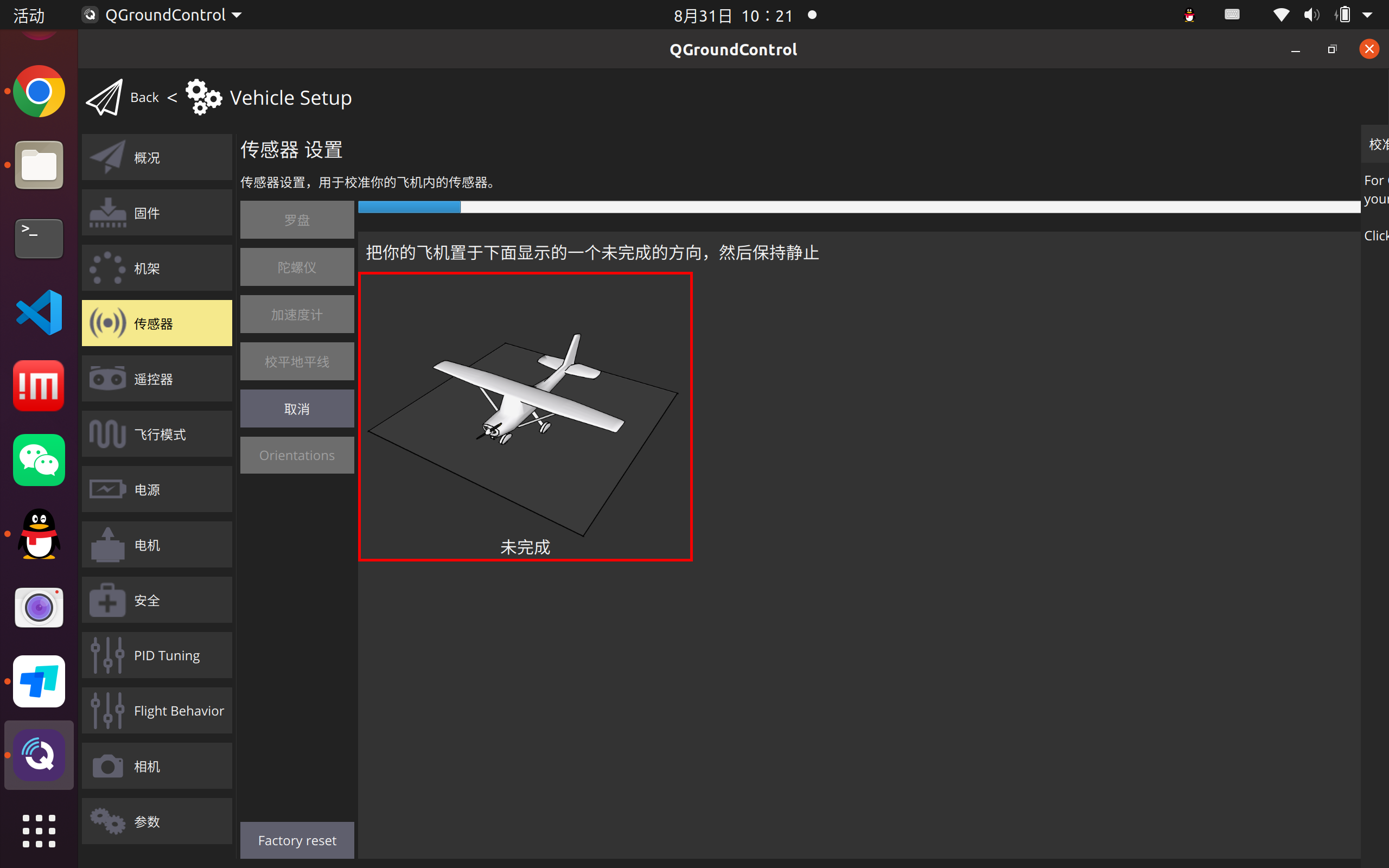
b.2加速度计校准
选择加速计校准
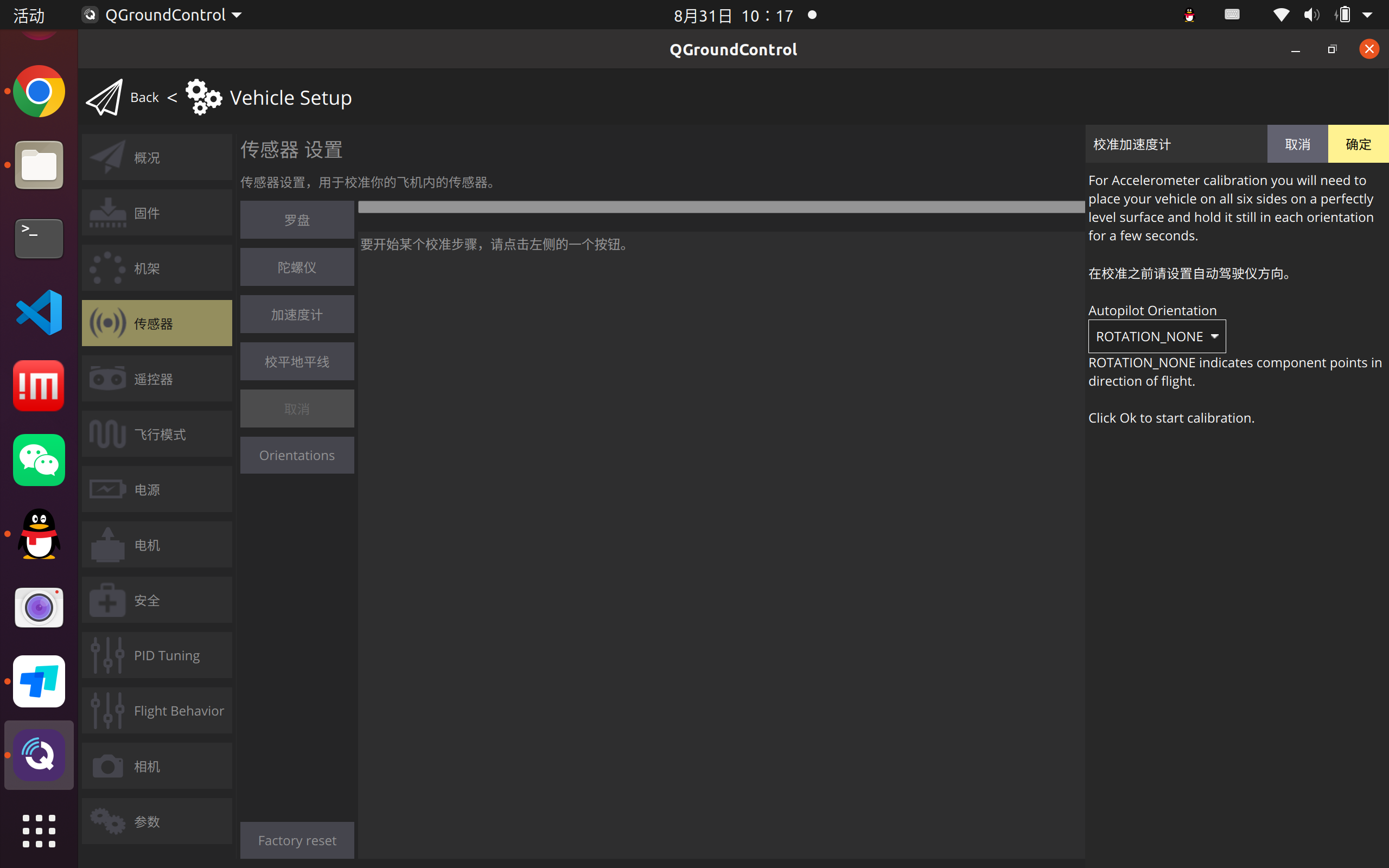
和罗盘校准的六个方向一致
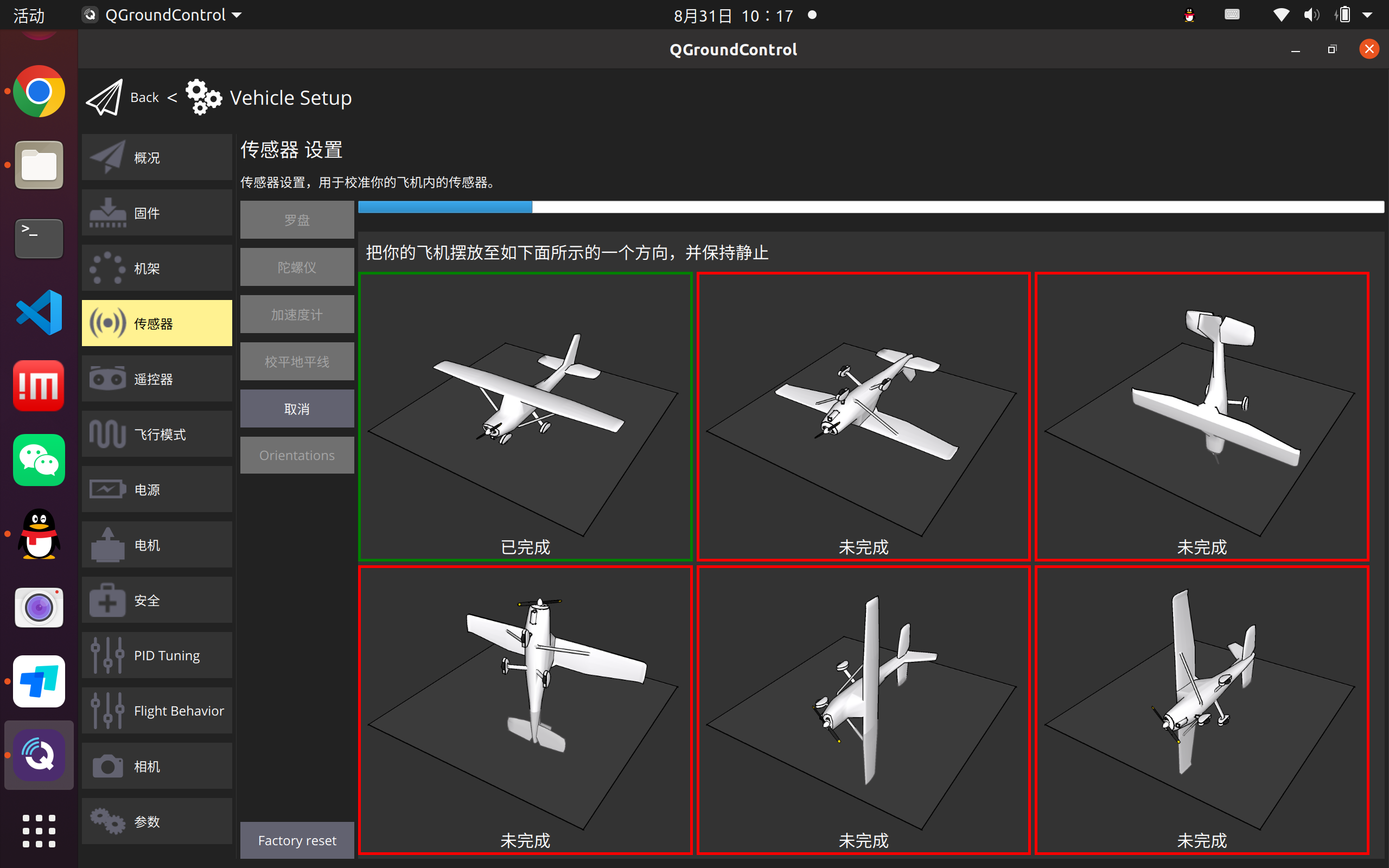
静置1-2s后,黄色提示保持静止,加速度计不需要和罗盘一样旋转,保持静止1-2s就行。

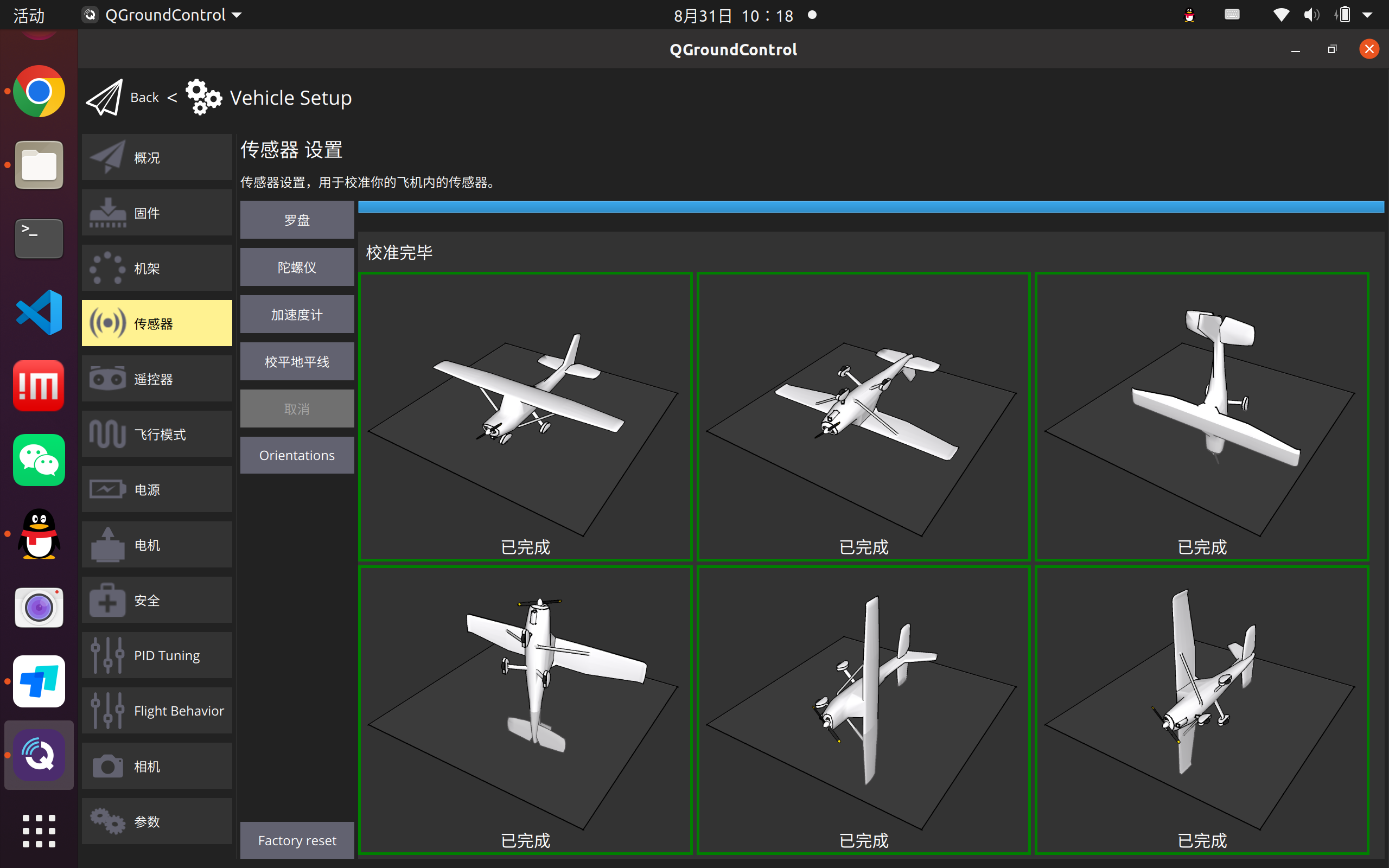
六个方向都校准完成后,提示校准完毕,和罗盘校准不一样,它不需要重启
b.3陀螺仪和地平线校准
陀螺仪和地平线校准很简单,放置水平点击校准即可,不到2s即可校准好
这里以陀螺仪为例
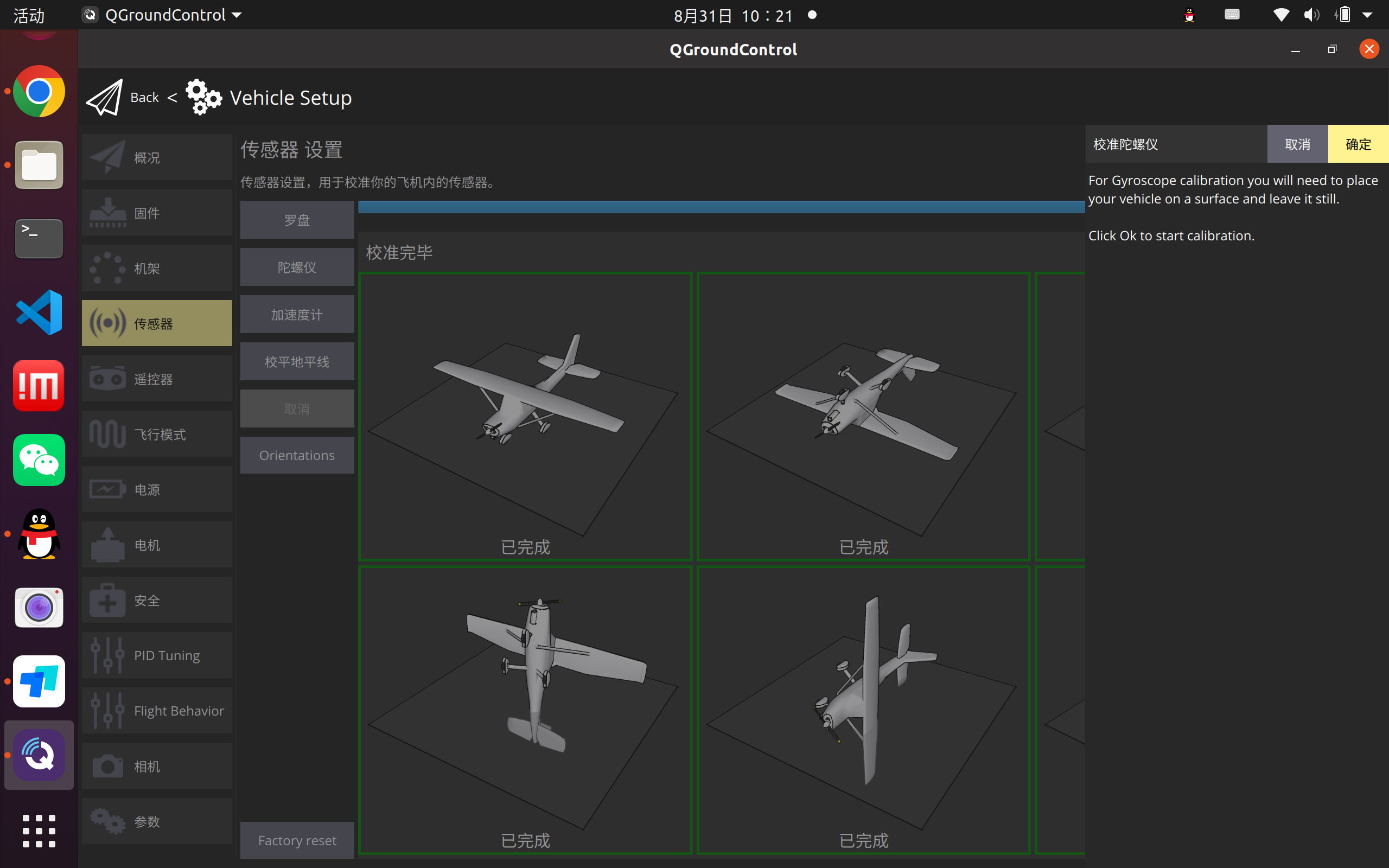
这就是校准完成

至此传感器就都校准完成了
c.遥控器校准与飞行模式设置
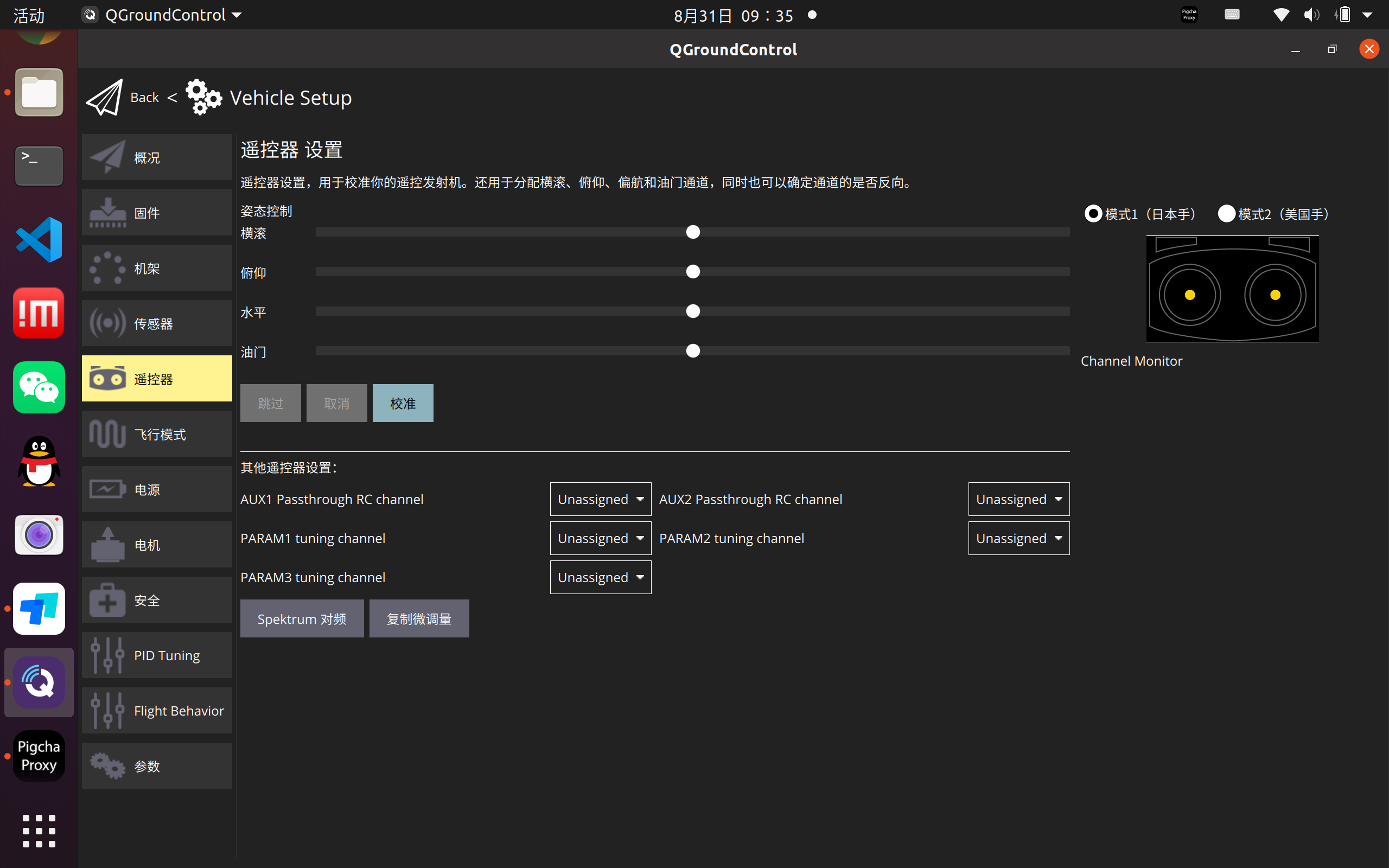
c.1遥控器校准
日本手是右手油门,美国手是左手油门,还有一个中国手,不过这里没有。大家第一次接触的话,还是用右手油门;当然哪一个都可以,我的学长就用左手油门飞直升机特技,同学也正从右手换左手。不过新手还是日本手(右手油门),因为受众更广,说不定哪天有人就帮你救机了。
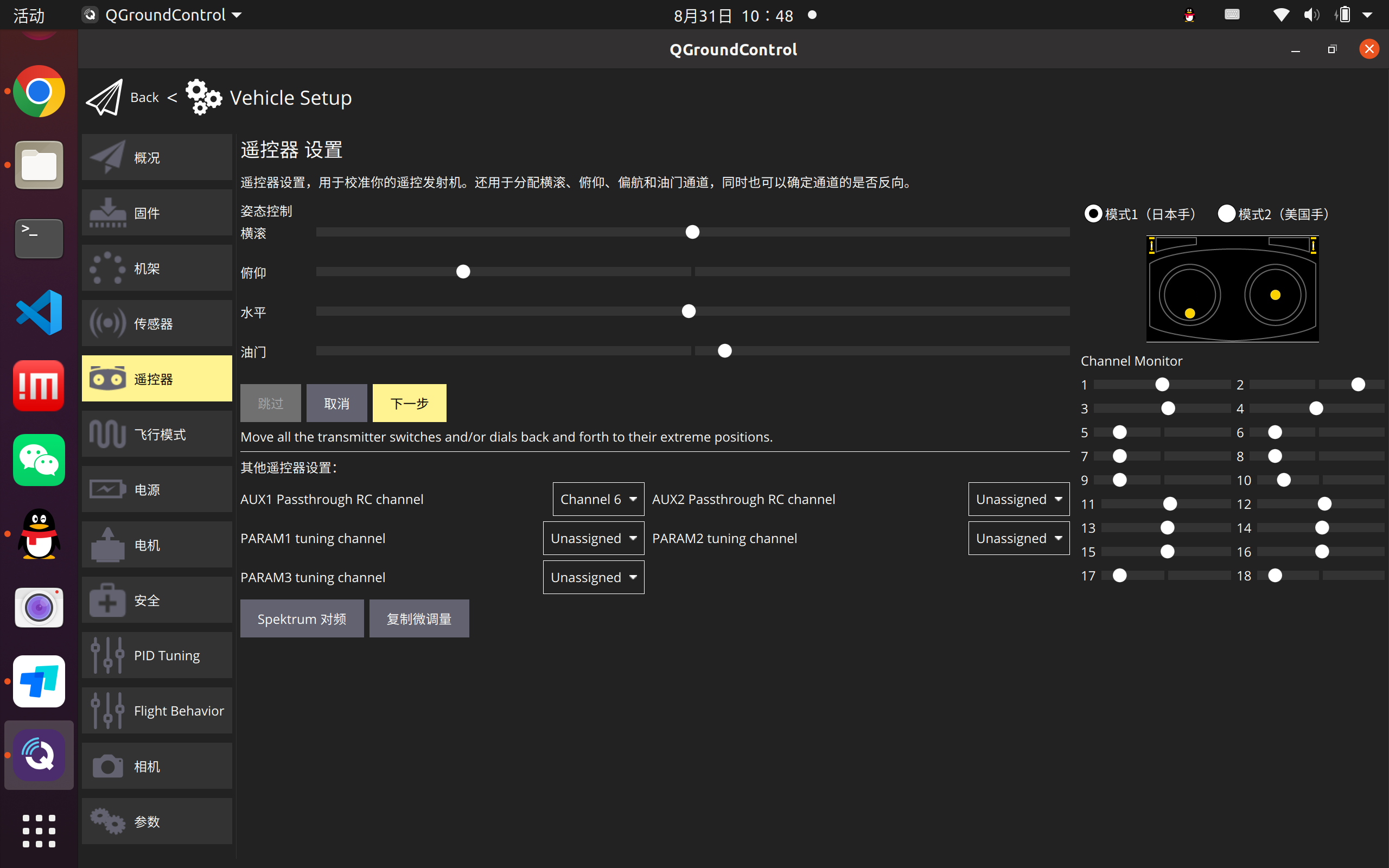
点击校准后,照它杆的指示做即可
网上有资料,但是我没找到相关照片链接
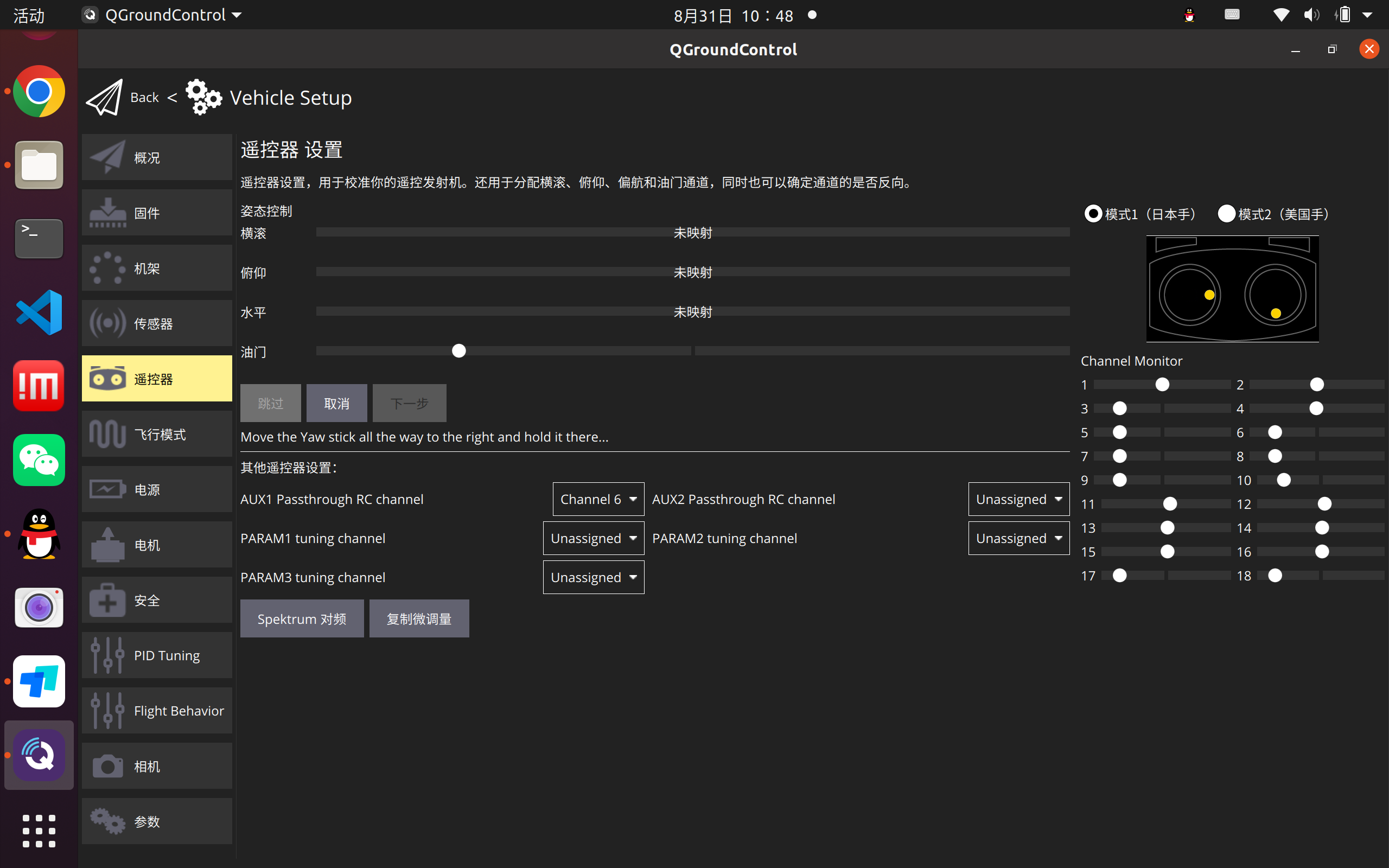
有些步骤需要点击下一步,直到操作完成。
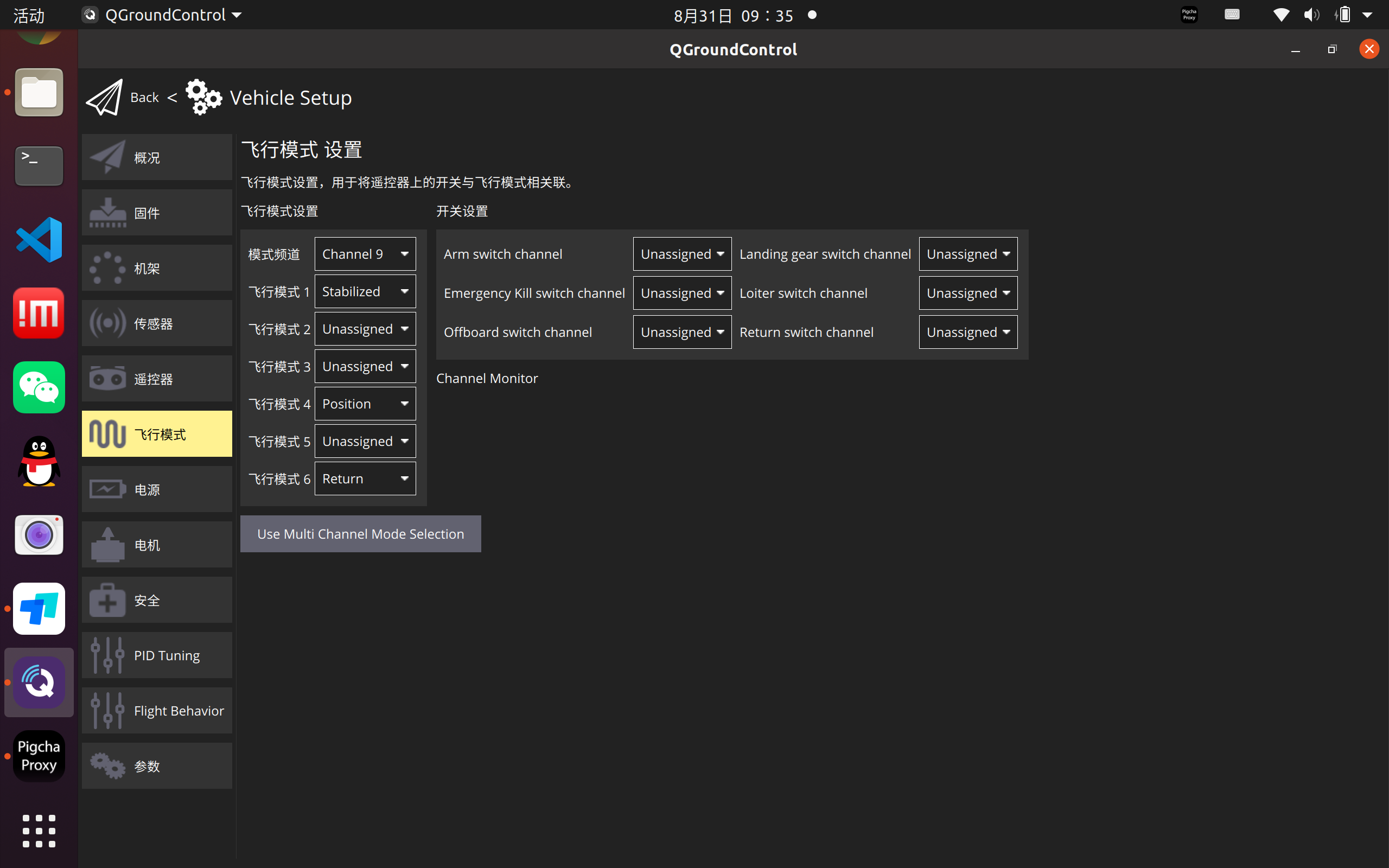
c.2飞行模式
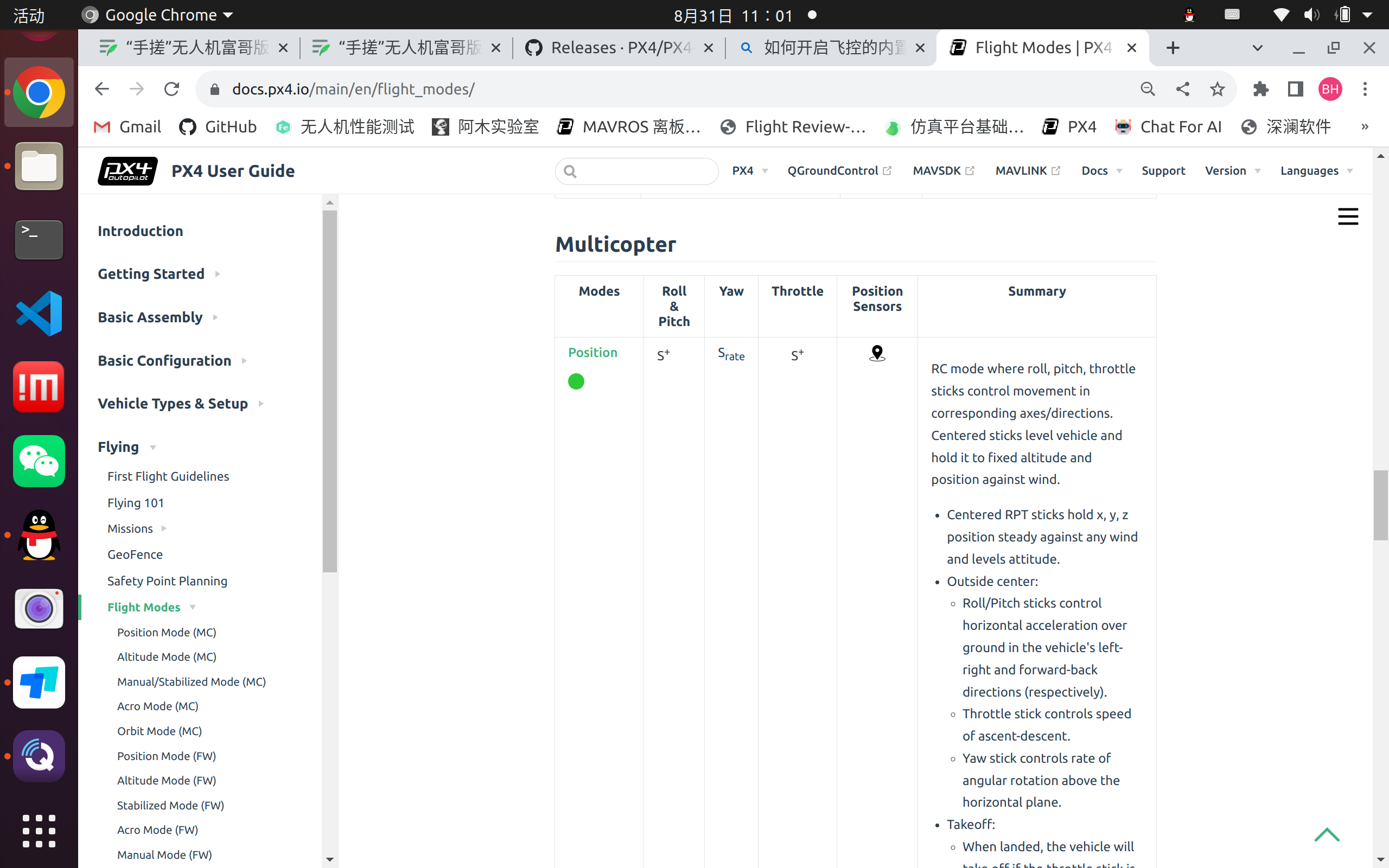
这里我们主要用三个,stabilized,position,return
分别是 自稳 、 位置 、返航
d.参数设置
d.1电源检查 CBRK_SUPPLY_CHK
这个参数是检查解锁时是否有电池供电,默认是需要电池供电(也就是插电流计供电)才可以解锁。如果想通过其他方式给飞控供电进行解锁,则需要设置该参数为894281。

d.2 USB连接检查
这个参数是检查起飞时是否有USB连接,默认情况下有USB连接时是无法解锁的,如果需要插USB解锁,需要设置为197848

d.3安全开关检查
默认情况下安全开关是慢闪状态,设置该参数蔚22027时,上电后安全开关自动切换为双闪。

更多的参数等待我的补充,这个模块很大,我一点点填充。



















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











