






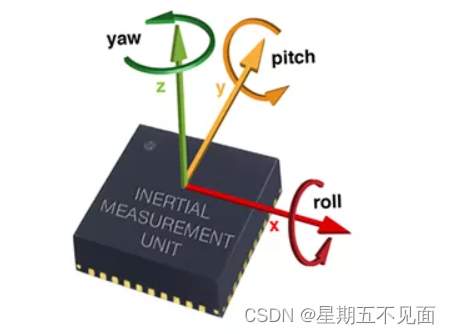
1 惯性传感器(IMU)简介
惯性测量单元(IMU),主要是用来检查和测量加速度与旋转运动的传感器。主要原理是利用惯性定律来实现。最基础的惯性传感器包括加速度计和角速度计(陀螺仪)。
2 全球卫星定位系统(GPS)简介
全球定位系统(GPS)是“授时、测距导航系统/全球定位系统(Navigation systerm Timing and Ranging/Global Positioning System)的简称。该系统是由美国国防部于1973年组织研制,主要为军事导航与定位服务的系统。历经20年,耗资300亿美元,于1993年建设成功。GPS是利用卫星发射的无线电信号进行导航定位,具有全球性、全天候、高精度、快速实时三维导航、定位、测速和授时功能,以及良好的保密性和抗干扰性。
3 卫星导航系统(GNSS)简介
全球卫星导航系统 (GNSS) 是一个一般术语,用于描述使用卫星信号来确定用户接收机位置的系统。目前的全球卫星导航系统中,美国的 GPS 系统和俄罗斯的 GLONASS 系统处于完全运行状态,可以提供全球定位服务。此外,中国的北斗系统 (也称为 Compass) 和欧盟的 Galileo 系统正在部署的进程中。
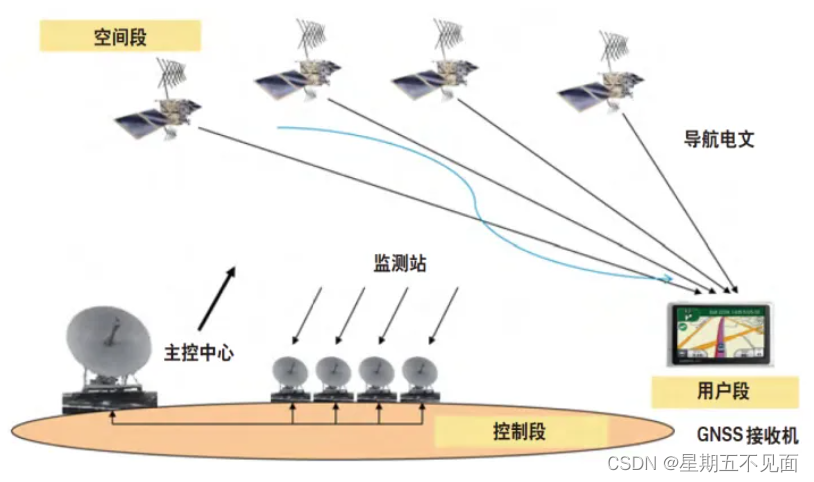
卫星导航系统 GNSS 系统分为三个主要部分。
- 空间段由卫星或航天器 (SV) 组成,用于传输包含卫星轨道、位置、传输时间的导航电文。
- 控制段指地面监测站和主控中心,用于跟踪卫星信号、收集伪距测量数据和大气层模型数据、提供导航信息更新、大气信息和校正信息以及进行卫星控制。
- 用户段是指 GNSS 接收机。
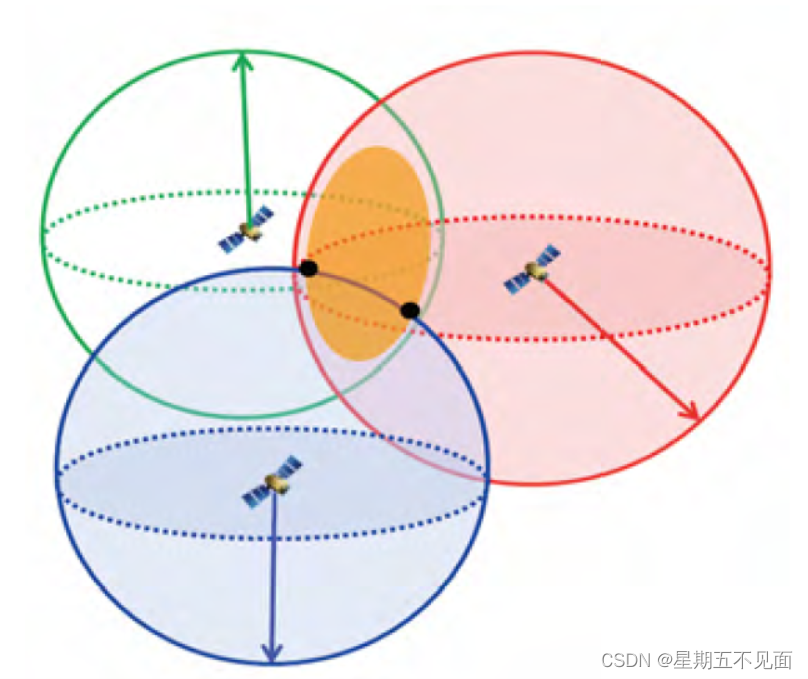
卫星导航系统 GNSS 接收机通过三边测量法来计算自身位置。
它使用导航电文中的传输时间和位置数据,测量卫星信号的时延,并由此计算接收机与卫星的距离(伪距)。首先,距离某颗卫星特定距离 (伪距) 的 GNSS 接收机所有的可能位置构成了一个球面。两个球面的交集是一个圆环。三个球面的交集则是两个点。最后需要第四个数据来确定接收机的正确位置。第四个数据可以是地球表面,也就是说,如果接收机位于地球表面,则位于地球表面上的点就是接收机的正确位置。对于更普遍的解决方案,则需要第四颗卫星的伪距,来进行定位。同时通过对四颗卫星进行测量,不仅可以确定接收机的位置信息,即经度、纬度和高度,还可以校正接收机的时钟误差,确定正确时间。

















 1972
1972

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









