






1 杆臂介绍
杆臂就是各个传感器之间的相对位置关系,在多传感器融合的时候,每个传感器的位置计算都是相对于自己的,把他们统一做滤波的时候,需要有一个统一的坐标系,就是要补偿这个距离。 以gps和ins组合为例,如果不补偿,位置观测就是有误差的,会把估计量带偏。 杆臂效应常见于惯导和其他导航系统的组合中,以惯导和GNSS为例,就是惯导系统安装位置和GNSS天线不重合,GNSS输出的观测值是天线相位中心的位置速度 (如果是松组合,GNSS导航结果应该会归算到接收机的安装位置),惯导的结果就是惯导系统安装的位置,那么组合时就会出现误差。
2 测量方法
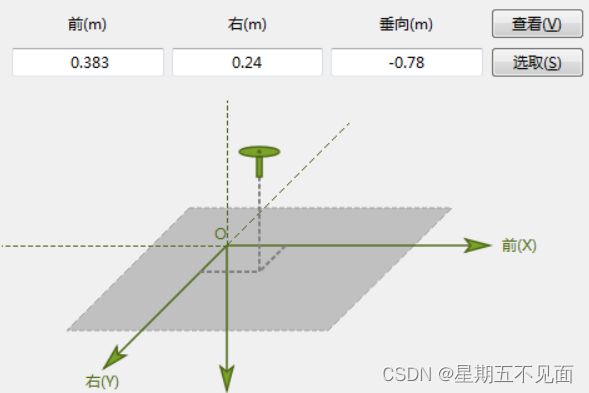
就是根据某一个传感器的坐标为原点,在该坐标系下,计算其他传感器的相对位置(x轴、y轴、z轴)。















 1299
1299











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









