






目录

定位感知
规划
决策控制
定位:绝对定位(GPS)、相对定位(传感器获得加速度和角加速度信息,将其对时间进行积分)
感知:通过传感器感知周围的环境和车辆状态信息,如何对多种传感器的信息进行融合统一处理。
规划:全局和局部路径规划。
控制决策:驾驶者大脑,主要包括转向、驱动、制动三个方面。
全局路径规划
1.Dijkstra 算法



2.蚁群算法



3.动态规划算法

几个核心要素:




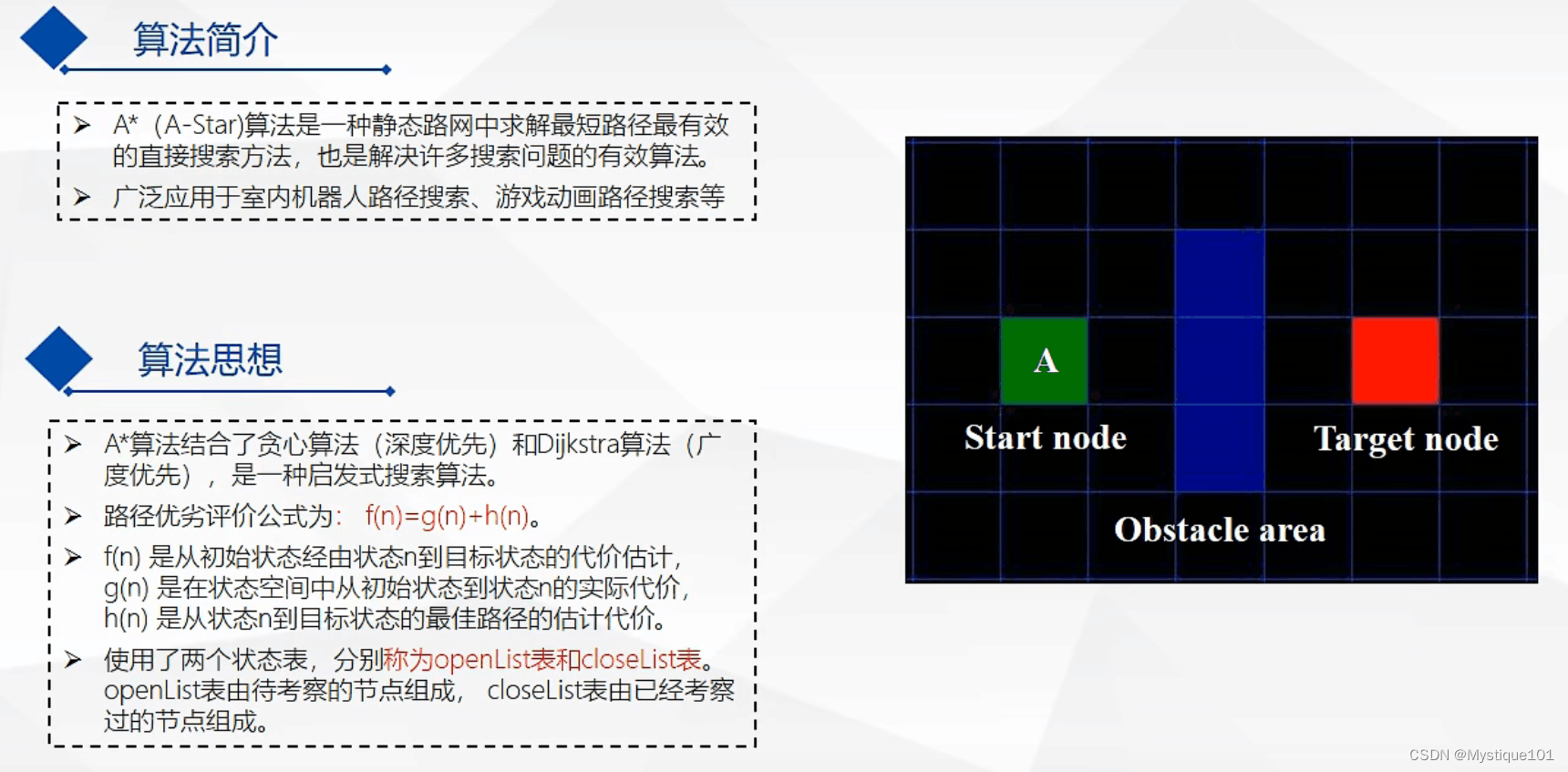
4.A* 算法



局部路径规划
1.曲线插值法




2.人工势场法


下图有个小问题,障碍物位置应该为目标点位置,左边公式中X0应该是Xg,书写错误。



3.贝塞尔曲线法






4.B样条曲线法



轨迹跟踪控制算法
1.车辆运动学模型和动力学模型

(1)车辆运动学模型




(2)车辆动力学模型







2.纯跟踪法
















 4万+
4万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









