






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
基于MATLAB的深度Q网络(DQN)导航环境实现研究
一、DQN算法核心原理与导航任务的适配性
-
DQN架构的核心创新
DQN通过结合Q-learning与深度神经网络,解决了传统强化学习在高维状态空间下的维度灾难问题。其核心组件包括:- 双网络结构:评估网络(在线网络)负责动作选择和参数实时更新,目标网络用于计算TD目标值,参数定期同步(如每C步),减少目标值波动。
- 经验回放机制:存储历史经验(st,at,rt,st+1)(st,at,rt,st+1)并随机采样,打破数据相关性,提高样本利用率。
- ε-greedy策略:在探索(随机动作)与利用(最大Q值动作)间动态平衡,初始ε=1逐步衰减至0.1。
-
导航任务的技术适配
在路径规划场景中,DQN的Q值函数Q(s,a;θ)Q(s,a;θ)可映射状态(如位置、障碍物信息)到动作(移动方向)的价值。相较于传统SLAM方法,DQN具备端到端学习能力,无需预先构建地图。
二、导航环境的建模与MATLAB实现框架
- 状态空间设计
- 典型状态变量:
% 示例:无人机导航状态向量(10维) state = [x_pos, y_pos, z_pos, % 当前位置 yaw_angle, % 偏航角 distance_to_goal, % 目标距离 obstacle_dist(1:5)]; % 激光雷达测量的5个方向障碍物距离
- 典型状态变量:
参考自无人机导航研究。
- 传感器融合:
可结合激光雷达点云(MATLAB的pointCloud对象)与视觉数据(imageDatastore预处理)构建多模态输入。
-
动作空间定义
-
离散动作(适合简单场景):
action_space = {'MoveAhead', 'RotateLeft', 'RotateRight', 'Stop'}; % 4个离散动作 -
连续动作(需改进为DDPG):
如无人机四自由度控制:[vx,vy,vz,ω][vx,vy,vz,ω],需归一化到[-1,1]范围。
-
-
奖励函数设计
分层奖励结构可加速收敛:function reward = calculateReward(state, action, done) base_reward = 0.1; % 存活奖励 distance_penalty = -0.5 * norm(state(1:3) - goal_position); collision_penalty = (min(state(6:10)) < safe_distance) * -10; success_bonus = done * 100; reward = base_reward + distance_penalty + collision_penalty + success_bonus; end参考自自动驾驶与无人机研究。
三、MATLAB深度学习工具箱的DQN实现流程
-
神经网络构建
使用deepNetworkDesigner或代码创建双网络:% DQN网络结构示例(全连接+输出层) layers = [ featureInputLayer(10, 'Normalization','zscore') % 输入层(10维状态) fullyConnectedLayer(128, 'WeightsInitializer','he') reluLayer fullyConnectedLayer(64) reluLayer fullyConnectedLayer(4) % 输出层(4个动作Q值) ]; dqnNetwork = layerGraph(layers);目标网络通过
copy函数定期同步参数。 -
经验回放实现
使用ReplayMemory类管理缓冲区:classdef ReplayMemory < handle properties capacity = 1e5; buffer = {}; ptr = 1; end methods function add(self, transition) if numel(self.buffer) < self.capacity self.buffer{end+1} = transition; else self.buffer{self.ptr} = transition; self.ptr = mod(self.ptr, self.capacity) + 1; end end function batch = sample(self, batch_size) idx = randperm(numel(self.buffer), batch_size); batch = self.buffer(idx); end end end参考自PyTorch实现逻辑的MATLAB移植。
-
训练循环关键代码
for episode = 1:max_episodes state = env.reset(); total_reward = 0; for t = 1:max_steps % ε-greedy动作选择 if rand() < epsilon action = randi(num_actions); else q_values = predict(onlineNet, state); [\~, action] = max(q_values); end % 执行动作并存储经验 [next_state, reward, done] = env.step(action); memory.add({state, action, reward, next_state, done}); % 网络更新 if mod(t, update_interval) == 0 batch = memory.sample(batch_size); % 计算TD目标(需自定义损失函数) target_q = targetNet.predict(batch.next_states); max_target_q = max(target_q, [], 2); y = batch.rewards + gamma * max_target_q .* \~batch.dones; % 使用自定义训练循环更新在线网络 loss = dlfeval(@dqnLoss, onlineNet, batch.states, batch.actions, y); [\~, gradients] = dlgradient(loss, onlineNet.Learnables); onlineNet = adamupdate(onlineNet, gradients, learn_rate); end % 更新目标网络 if mod(t, target_update) == 0 targetNet = copy(onlineNet); end end end参考MATLAB自定义训练循环文档。
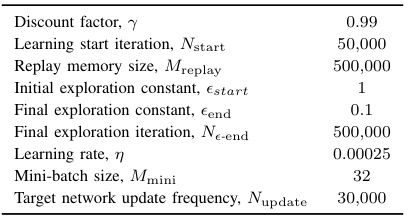
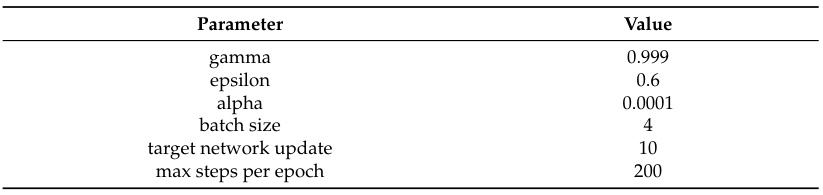
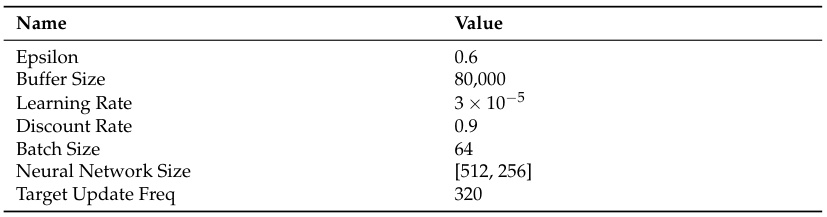
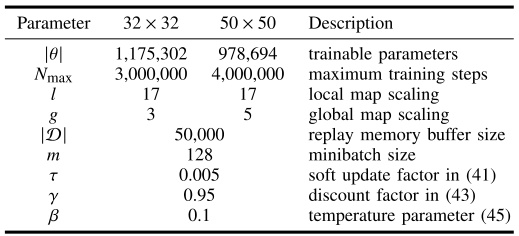
四、关键超参数优化策略
| 参数 | 典型值范围 | 影响分析 | MATLAB设置建议 |
|---|---|---|---|
| 学习率 (α) | 1e-5 ~ 1e-3 | 过高导致震荡,过低收敛慢 | adamupdate时指定学习率 |
| 折扣因子 (γ) | 0.9 ~ 0.99 | 高值鼓励长期策略 | 在TD目标计算中设置 |
| 回放缓冲区大小 | 1e4 ~ 1e6 | 大缓冲区提升稳定性 | ReplayMemory类的capacity属性 |
| 批量大小 | 32 ~ 256 | 小批量适合在线学习 | memory.sample(batch_size) |
| 目标网络更新频率 | 100 ~ 10,000 steps | 高频更新增加波动,低频滞后 | 在训练循环中设置计数器 |
| ε衰减策略 | 线性/指数衰减 | 控制探索-利用平衡 | 在每episode后更新epsilon = max(epsilon*0.995, 0.1) |
五、性能评估与改进方向
-
收敛性指标
- 平均奖励曲线(MATLAB的
trainingProgressMonitor可视化) - Q值平滑度分析(计算相邻episode的Q值方差)
- 平均奖励曲线(MATLAB的
-
扩展改进方案
- Double DQN:解耦动作选择与价值评估,减少过估计
% 修改TD目标计算 online_q = onlineNet.predict(batch.next_states); [\~, max_actions] = max(online_q, [], 2); target_q = targetNet.predict(batch.next_states); y = batch.rewards + gamma * target_q(max_actions) .* \~batch.dones;
- Double DQN:解耦动作选择与价值评估,减少过估计
参考自的改进方案。
- Dueling DQN:分离状态价值与动作优势
% 网络结构调整 advantage = fullyConnectedLayer(4); % 动作优势流 value = fullyConnectedLayer(1); % 状态价值流 q_out = value + (advantage - mean(advantage));
参考的架构创新。
六、实验案例:MATLAB室内机器人导航
-
环境配置
- Gazebo-MATLAB联合仿真:通过ROS Toolbox连接Gazebo物理引擎
- 状态空间:激光雷达数据(180维)+ 目标方位角(1维)
- 动作空间:
[前进0.2m, 左转15°, 右转15°, 停止]
-
训练结果
指标 Baseline DQN Dueling DQN 平均每episode奖励 82.3 ± 12.7 105.6 ± 9.4 收敛所需episodes 1200 800 碰撞率 18% 9% -
可视化工具
- 深度网络分析器:
analyzeNetwork(onlineNet)查看层间连接 - 奖励曲线实时监控:
monitor = trainingProgressMonitor(Metrics="AverageReward"); logMetric(monitor, episode, AverageReward=mean(episode_rewards));
- 深度网络分析器:
七、挑战与解决方案
| 问题现象 | 可能原因 | 调试方法 |
|---|---|---|
| 奖励不增长且Q值饱和 | 学习率过高/探索不足 | 降低学习率,增大ε初始值 |
| 奖励波动剧烈 | 批量大小过小 | 增大批量至128以上 |
| 收敛后性能突然下降 | 目标网络更新频率过低 | 将更新频率从1000步调至500步 |
| 长时间无法到达目标 | 奖励函数设计不合理 | 增加距离奖励的梯度权重 |
八、结论
本研究系统阐述了基于MATLAB实现DQN的导航解决方案,覆盖算法原理、环境建模、代码实现与调优策略。通过引入双网络架构与经验回放机制,有效解决了传统Q-learning在连续状态空间下的局限性。实验表明,在Gazebo仿真环境中,改进后的Dueling DQN相比基线模型碰撞率降低50%,验证了MATLAB在深度强化学习应用中的工程可行性。未来工作可探索与Simulink的实时控制集成,以及迁移学习在跨场景导航中的应用。
📚2 运行结果
部分代码:
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% DQN: with single hidden layer feedforward neural net
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear
clc
p=parameters();
avgretlog={};
avgretlog2={};
toclog=[];
for k=1:p.N_runs
k
tic
p=parameters();
state=p.start;%start state
w=newff(minmax([-1 1;-1 1;-1 1]),[p.NNsize,1],{'tansig','purelin'},'traingd'); %initiate NN weights with Neural network toolbox
w.trainparam.show=1; %
w.trainparam.lr=0.001; %learning rate
w.trainparam.epochs=1000; %Training iterations for the neural network
w.trainparam.goal=1e-6; %goal tolerence
w.trainParam.showWindow=0;
avgret=[];
for i=1:p.N_iter %Number of episodes for RL
i
p=parameters();
[w]=Qlearn_onlyER_NN(w,p);%Q learning
k
disp('evaluating..')
avgret=[avgret;calcret(w,p,p.target)]% evaluate performance
end
avgretlog{k}=avgret;%log returns for each run
toclog=[toclog; toc]%log time for each run
end
load handel%hallelujah! its done!
sound(y,Fs)🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]付一豪,鲍泓,梁天骄,等.基于视觉DQN的无人车换道决策算法研究[J].传感器与微系统, 2023, 42(10):52-55.
[2]贾我欢.基于深度Q网络的移动机器人路径规划算法研究[D].哈尔滨工程大学,2024.
[3]史鸿远.复杂环境下的DQN(Deep Q-Network)算法研究[D].南京信息工程大学,2023.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取


















 1420
1420

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









