






一、问题的提出
我们在道路设计过程中,都知道有这么一条规定,当曲线半径小于或等于250m时,需要进行加宽设计,以城市道路为例,具体要求如下:
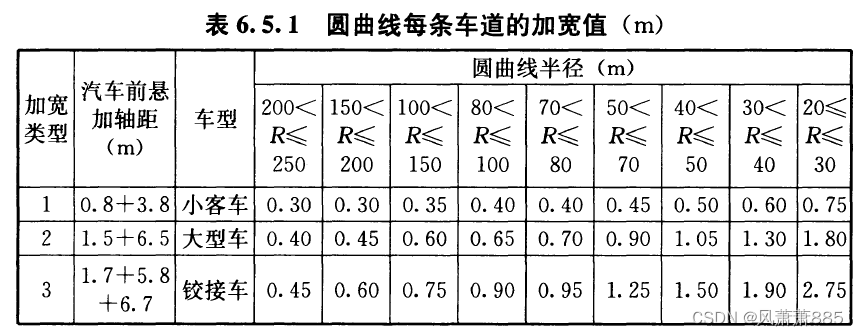
是否就意味着,当曲线半径大于250m时,就不需要进行加宽设计呢?下面,以本人设计中遇到的一个设计项目为例子,与大家一同探讨。
二、案例情况简介
某城市快速路,设计车速80km/h,主线采用高架形式,双向六车道,主线横断面为:0.5m(防撞墙)+0.5m(路缘带)+3.5m*3(车行道)+0.5m(路缘带)+0.6m(防撞墙)+3.5m*3(车行道)+0.5m(路缘带)+0.5m(防撞墙)=24.6m
路线中有一处直-缓-圆-缓-直,其中,缓和曲线长75m,圆曲线半径为300m。
三、规范分析
在城市道路路线设计规范中,有如下规定:
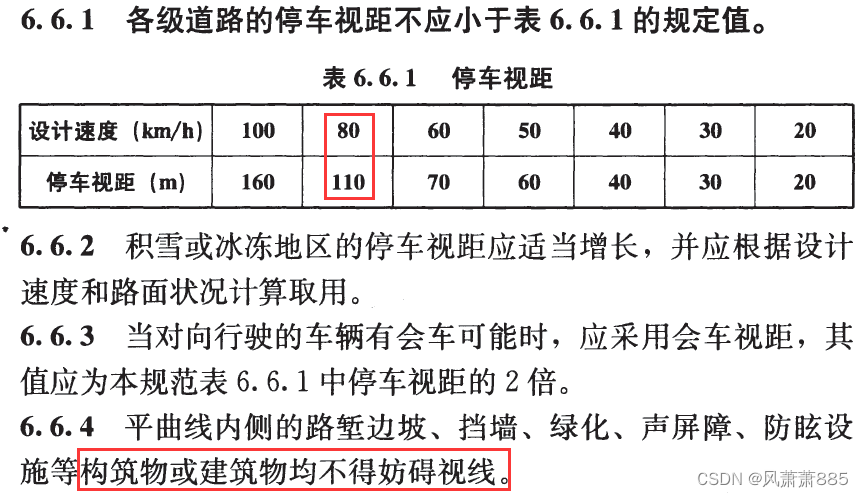
也就是说,设计车速为80km/h的道路,要满足110m的停车视距,而由于主线为高架,两侧都是水泥防撞墙,那么,防撞墙是否会妨碍视线呢,我们需要画出视距包络图来进行复核,那么,如果绘制视距包络图呢?
四、视距包络图的绘制方法
绘制视距包络图之前,先要明确视点的位置和障碍物的位置,这里,我们参照《公路路线设计规范》(JTG D20-2017)中的规定,如下:
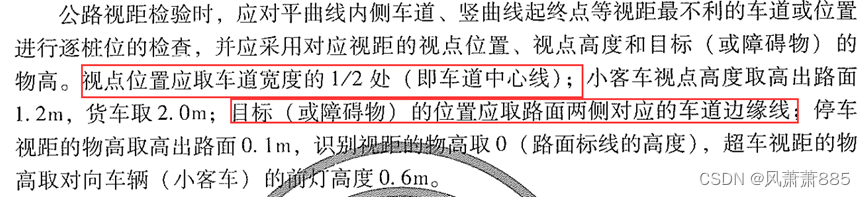
也就是说,视点位置取车道宽度的1/2处,障碍物的位置取路面两侧对应的车道边缘线。
下面,介绍一下视距包络图的具体画法。
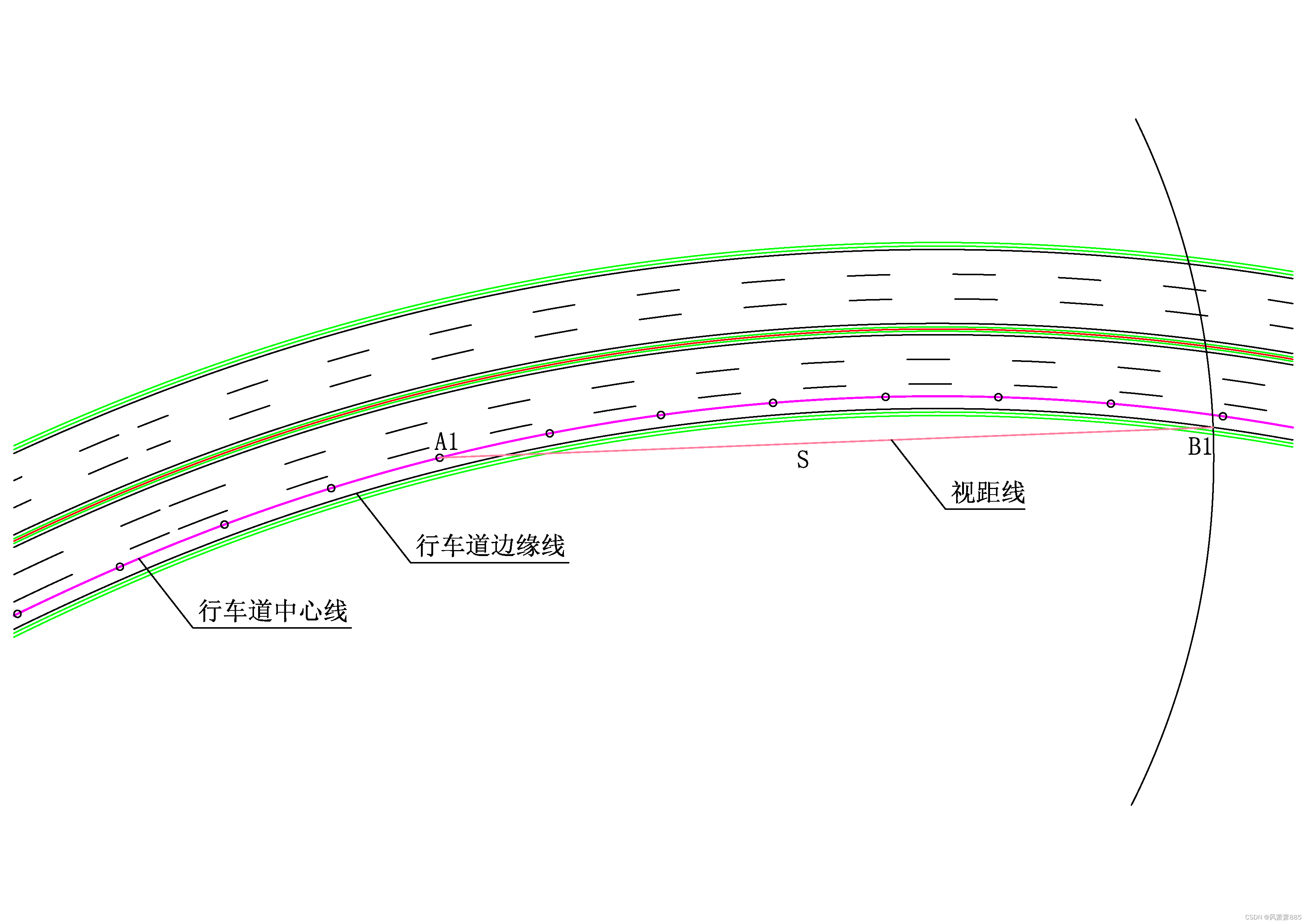
step1:绘出外侧车道的中心线,并标出相应的等分点,如下图所示:
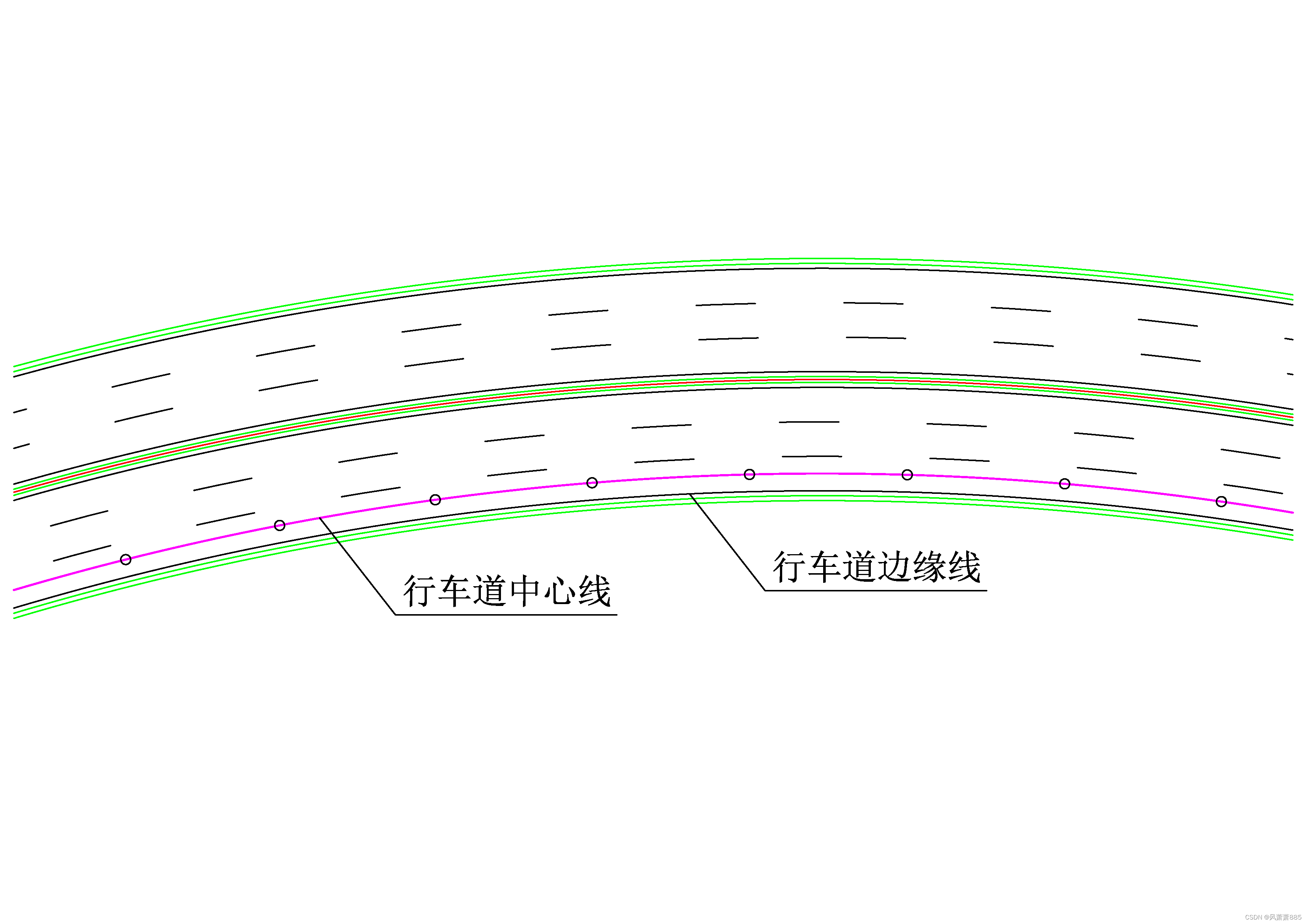
step2:从行车道中心线上的等分点A1,以停车视距S=110m为半径做圆,与行车道边缘线有个交点B1,将A1B1连起来,得到一条视距线。
step3:从行车道中心线的各等分点出发,分别绘制视距线,用一条线把所有的视距线都包起来,即为视距包络线,视距包络线与行车道边缘线之间的距离,即为横净距。
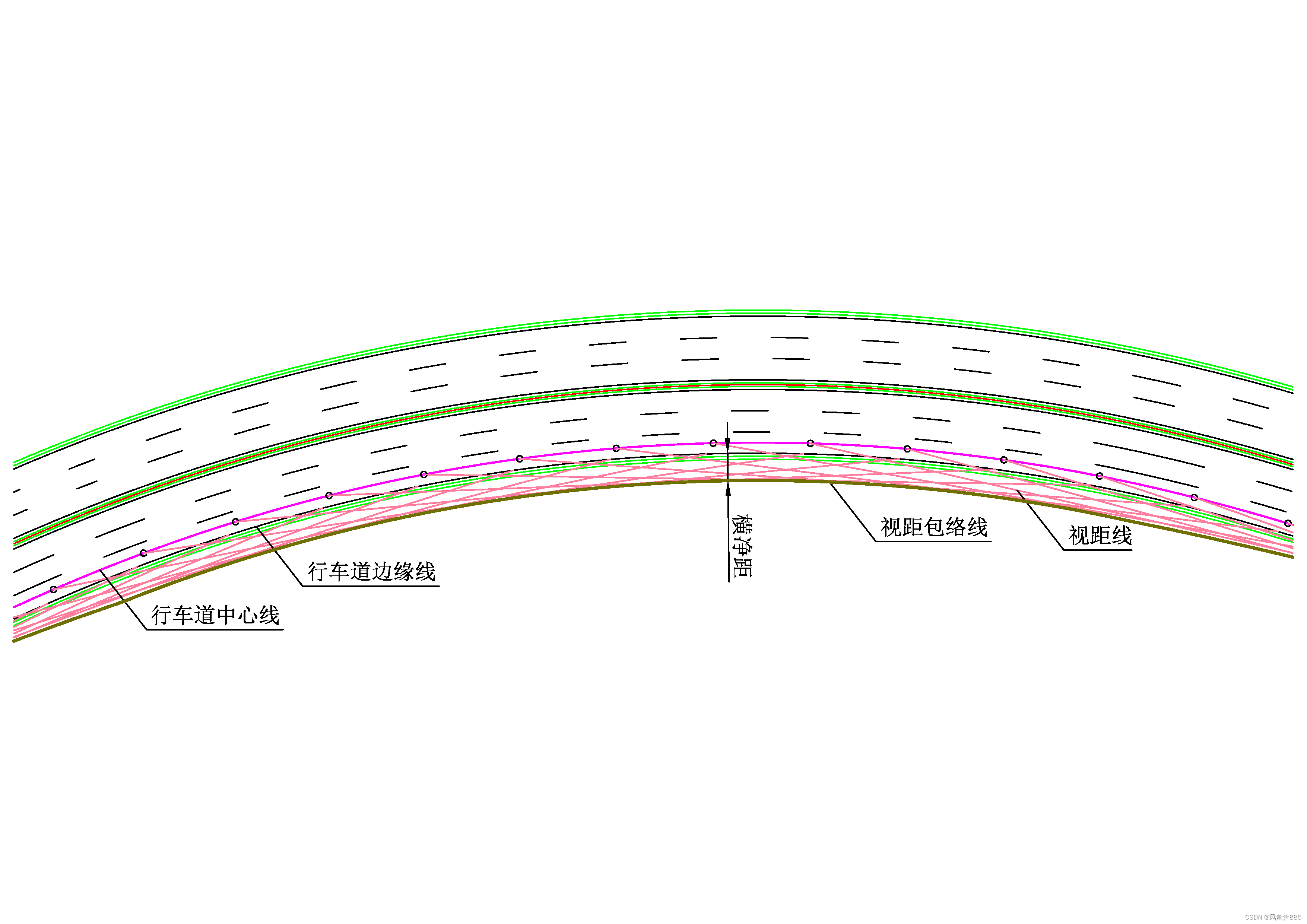
从上图可以看出,在这个案例中,高架的外侧水泥防撞墙位于视距包络线内,因此,不满足停车视距的要求。
那么,针对这种情况,我们如何进行处理呢?
五、曲线内侧的加宽方式
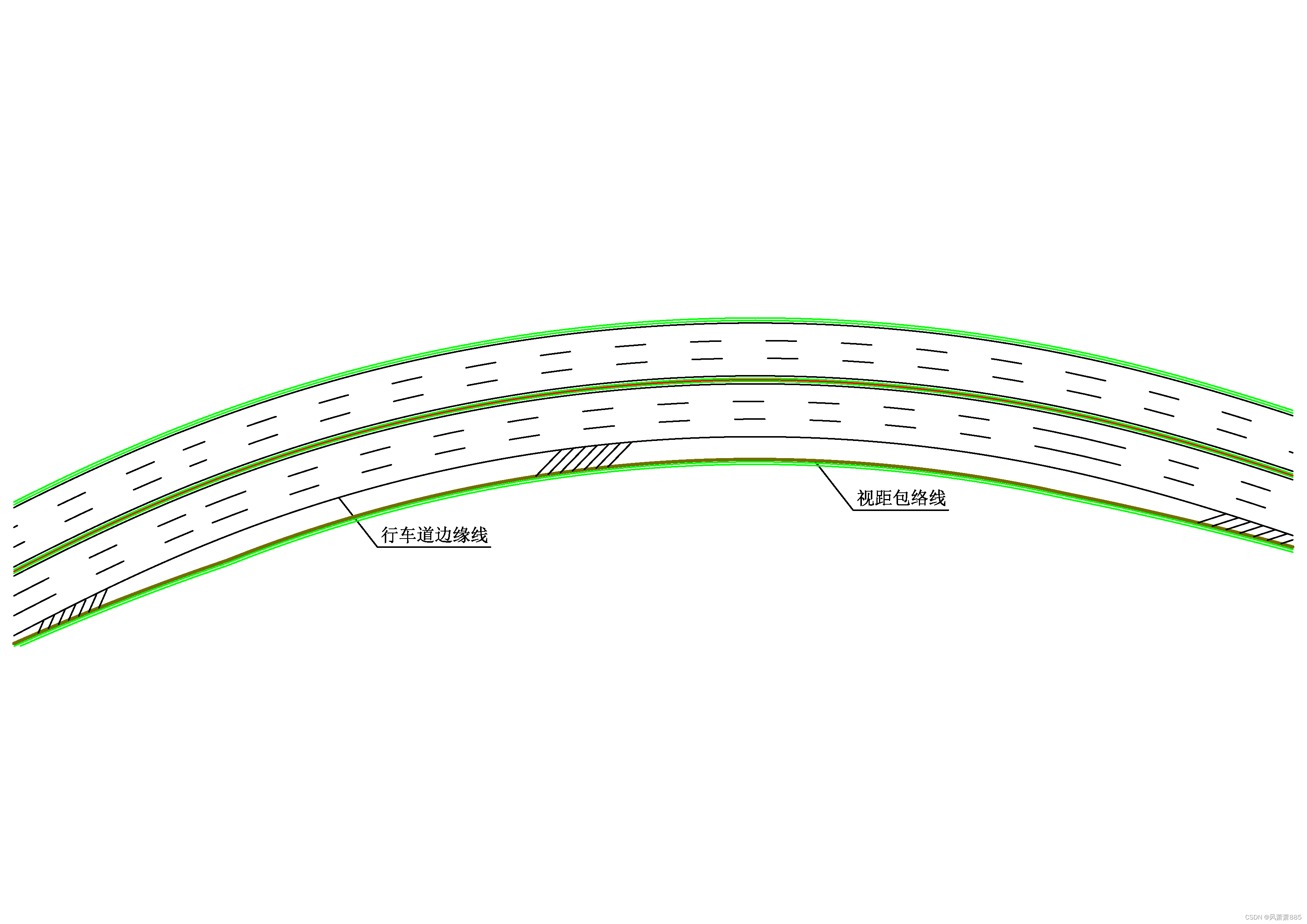
对于上述圆曲线内侧最外侧车道视距包络线内存在障碍物的情况,通常可以采用的办法是在曲线内侧加宽,加宽后的部分用标线打掉,将防撞墙移至视距包络线以外,如下图所示。采用这一方法,车行道本身的线形未发生变化,圆曲线的加宽值为横净距(本例中为4.5m),对于渐变段长度,只要满足防撞墙位于视距包络线之外即可,没有另外的要求。
上述方法适用于曲线内侧,而对于曲线外侧,是否满足停车视距的要求呢?
六、曲线外侧的加宽方式
参照上述相同的方法,绘制出曲线外侧第一根车道的视距包络图,可以看出,同样存在水泥防撞墙位于视距包络图内,导致停车视距不满足要求的现象。
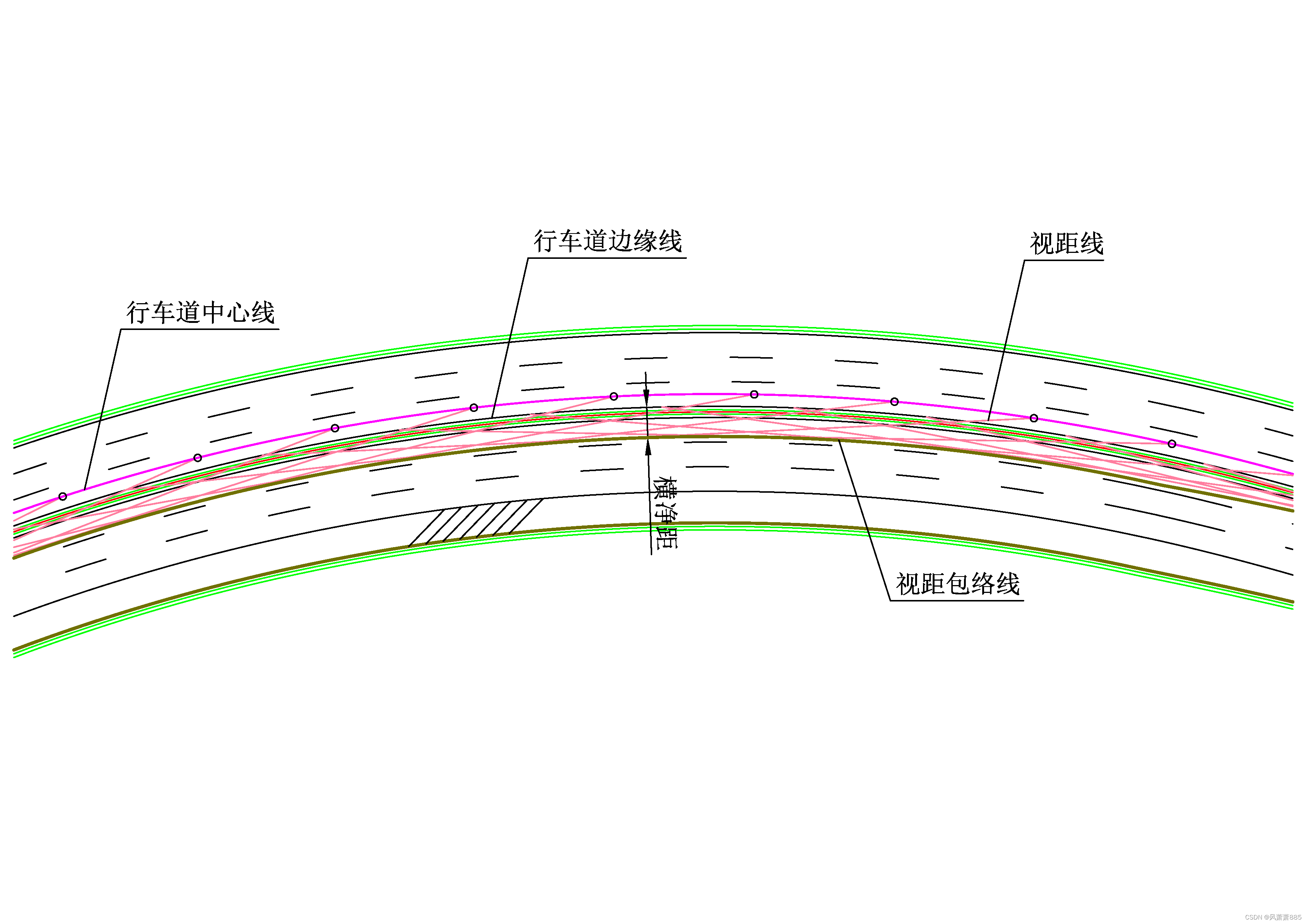
而对于这种情况,我们不仅需要进行加宽,还要调整行车道的位置,将三根车道及外侧防撞墙向外侧偏移,具体偏移尺寸与横净距相同(本例中为4.3m),中央防撞墙的位置不动,第一根车道与中央防撞墙之间用标线打掉,如下图所示:
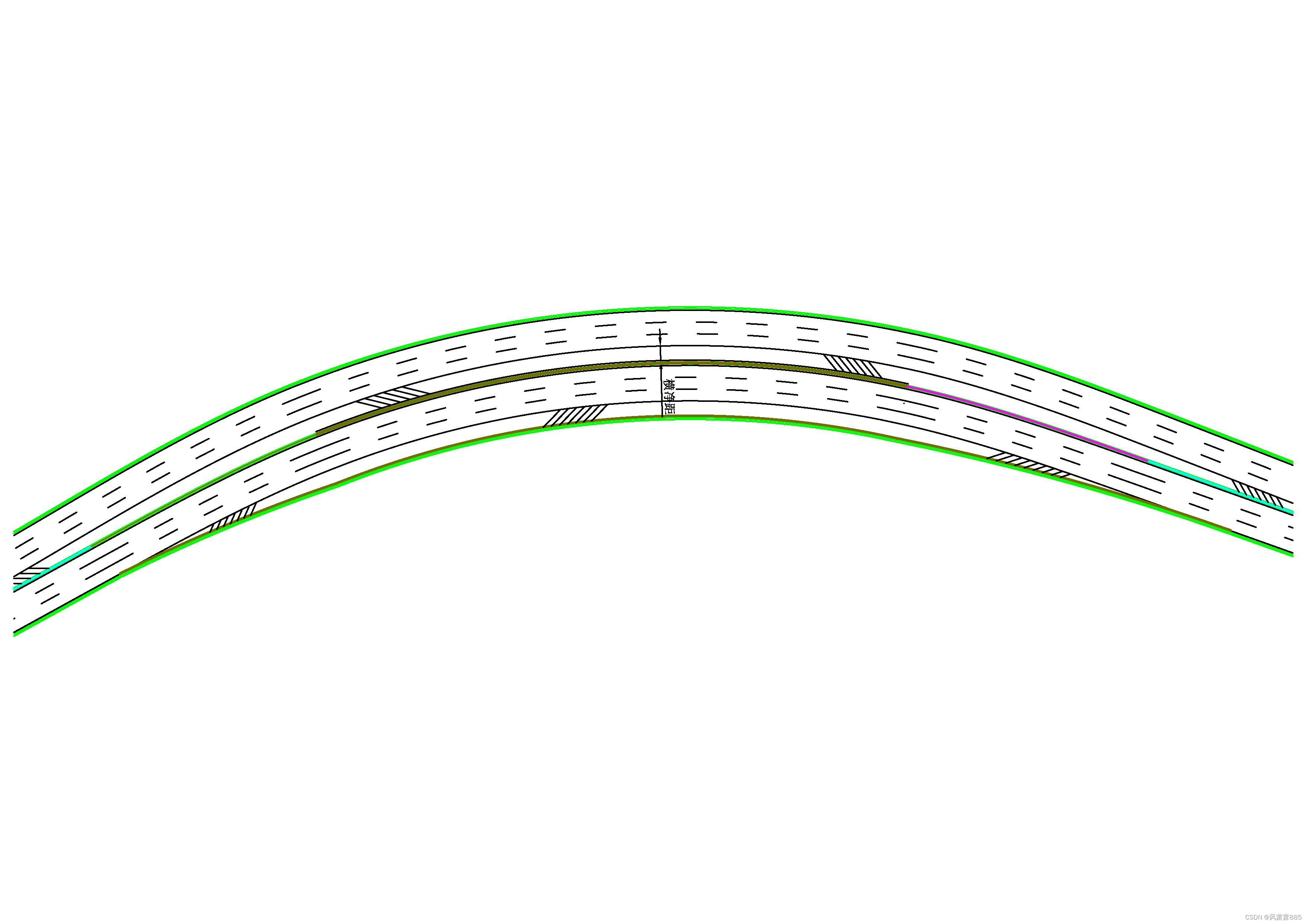
与曲线内侧加宽不同,曲线外侧加宽对车行道的位置进行了偏移,也就是行车轨迹发生了改变,要么重新进行线形设计,要么采用渐变段进行过渡,本例中,偏移后的车行道与两端直线无法重做线形,故采用渐变段进行过渡,那么,渐变段需要采用多长呢?
本来,在《公路路线设计规范》(JTG D20-2017)中,对于中央分隔带的变化,有一个采用不大于1/100的渐变率渐变的方式可以参考,但其适用于中间带宽度变化小于3m的情形,本例中,宽度渐变达4.3m,不适用这种情形。

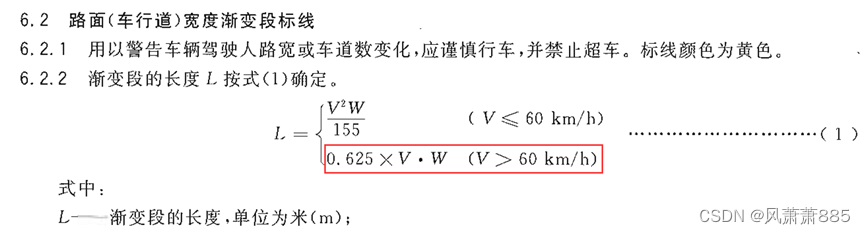
最后,我们借鉴《道路交通标志和标线 第三部分》(GB5768.3)中的规定,计算得出渐变段的长度为215m。
七、结论和建议
1)当设计车速较高时,即使曲线半径大于250m,要进行视距复核,当视距包络图内存在水泥防撞墙等建筑物又不能取消时,应进行加宽设计。
2)曲线内侧进行加宽时,行车道边线不会发生改变,将阻碍视线的建(构)筑物移至视距包络图外即可。
3)曲线外侧进行加宽时,行车道边线会发生改变,曲线段进行加宽设计后,需设置一定长度的渐变段,以满足车道偏移的需求。
4)针对视距包络线内存在水泥防撞墙的情况,也有些单位提出,可以采用将水泥防撞墙调整为通透式护栏的形式,而不去进行加宽。这也是一个解决思路,但还存在一定的问题:规范中尚未有通透式护栏的标准图纸,设计单位自行去设计,一方面如何保证满足防撞等级的要求?另一方面,为满足防撞要求,必然要设置立柱和防撞板,这些或多或少会对驾驶员的视线产生影响,无法真正做到通透。
以上为个人的一些建议和看法,供大家参考和讨论!

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









