






1.下载安装参考
用这条指令!!!
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple evo --upgrade --no-binary evo
.https://blog.csdn.net/u011341856/article/details/1045943922
2. 针对特定的数据格式,以ORB-SLAM2为例,若运行成功,会在终端显示save字样,在主文件夹下生成KeyFrameTrajectory.txt。然后可以进行相关操作,如数据集带真实轨迹,可以进行对比.
3.使用方法
evo工具主要有如下六个常用命令:
evo_ape - 用于评估绝对位姿误差;
evo_rpe- 用于评估相对位姿误差;
evo_traj - 这个主要是用来画轨迹、输出轨迹文件、转换数据格式等功能;
evo_res- 比较来自evo_ape或evo_rpe生成的一个或多个结果文件的工具;
evo_fig - (实验)工具,用于重新打开序列化图(使用–serialize_plot保存);
evo_config - 这个主要用于evo工具全局设置和配置文件操作。
3.1 evo_ape用法
简单用法:
evo_ape kitti a.txt b.txt解释:如上命令的意思是,比较kitti数据集格式的a.txt和b.txt文件的绝对误差精度。如果你要比较的数据集格式为euroc,那么此时可以使用如下命令:
evo_ape euroc a.csv b.csv
结果:
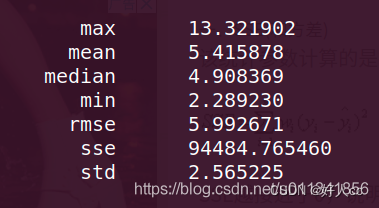
其中:
max:表示最大误差;mean:平均误差;median:误差中位数;min:最小误差;rmse:均方根误差;sse:和方差、误差平方和;std:标准差
evo_ape可选参数见上面的链接🔗
3.2 evo_rpe用法同上
3.3 evo_traj用法
该命令evo_traj命令十分有用,它主要用于画轨迹图、表格,转换数据格式等等操作。
(1)单独绘制轨迹:evo_traj tum KeyFrameTrajectory.txt -p
(2)将多个轨迹画到一起 : evo_traj tum KeyFrameTrajectory.txt CameraTrajectory2.txt --ref CameraTrajectory2.txt -va -p
或者: evo_traj tum KeyFrameTrajectory.txt CameraTrajectory2.txt --ref KeyFrameTrajectory.txt -va -p
















 1081
1081











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









