






Windows 11 Github 上 复现 PointNet ++Classification 任务
下载代码和安装依赖环境
安装git
Git clone
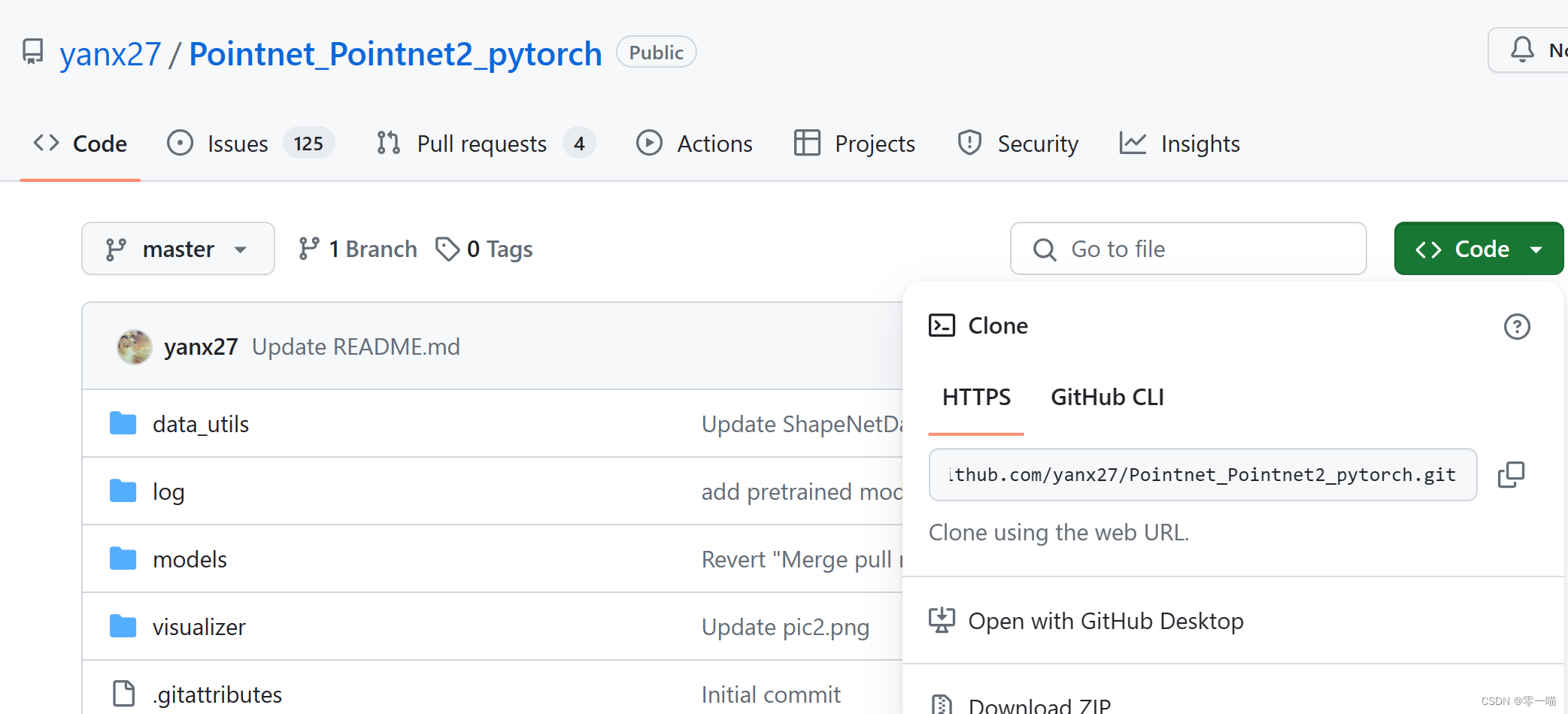
点击Code 复制HTTPS
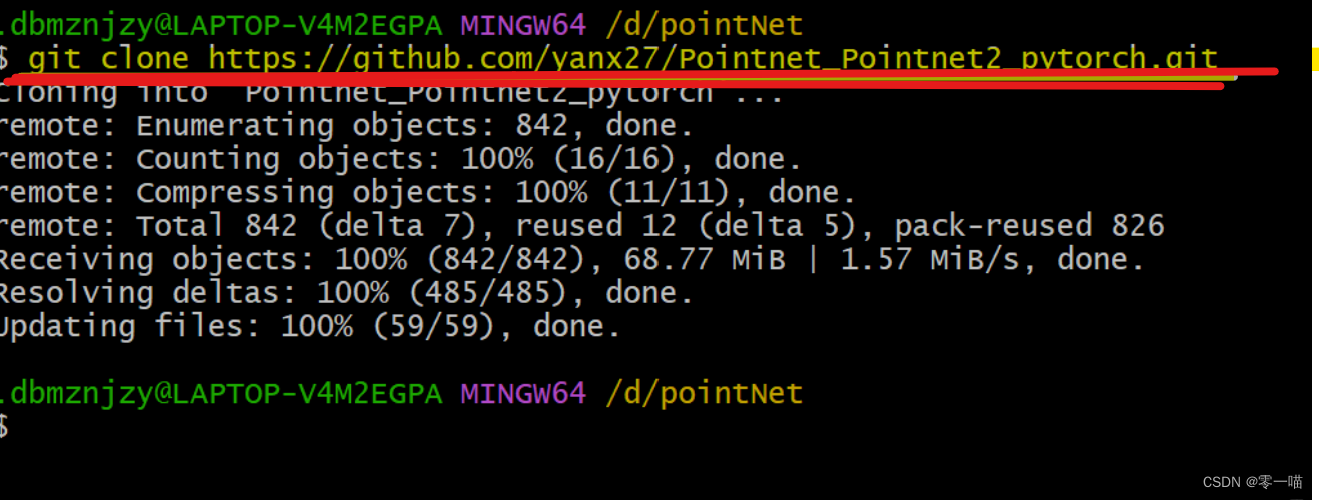
到目标目录
shift-右键 Git Bash Here
输入
Git Clone <url>
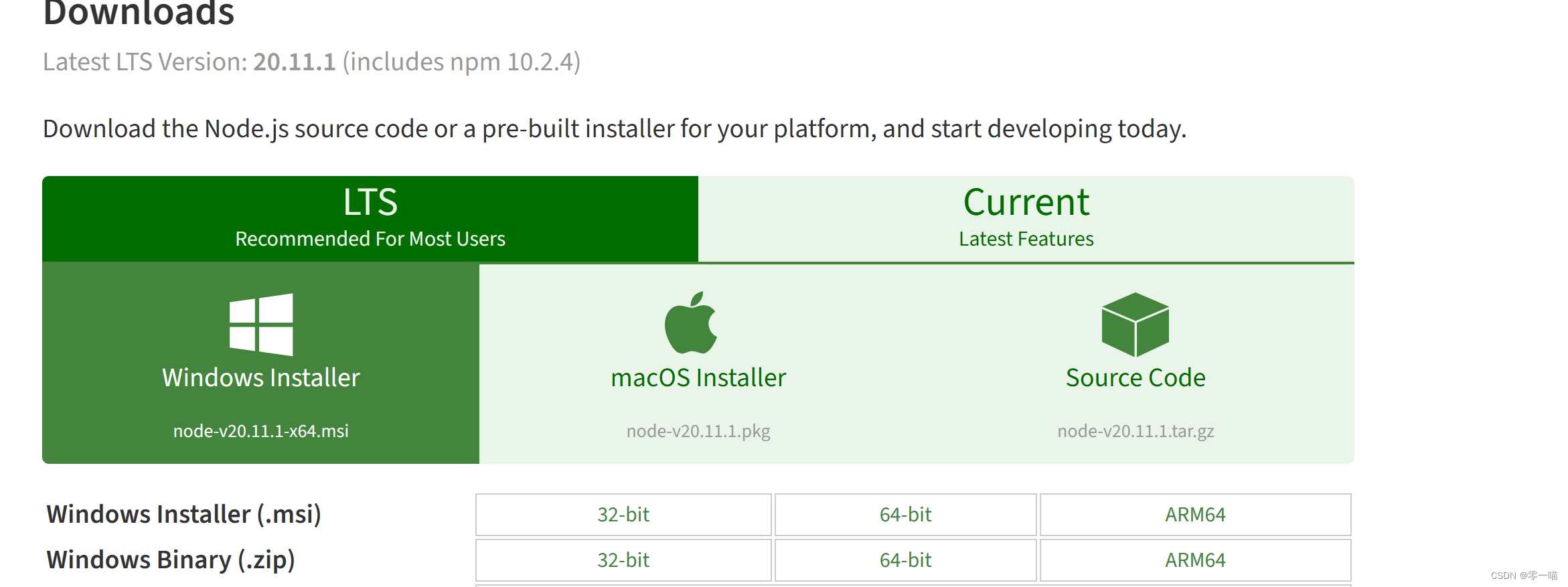
安装nodejs
Node.js — Download (nodejs.org) 根据电脑型号选择
到目标目录继续输入以下命令:
npm init -f
npm install
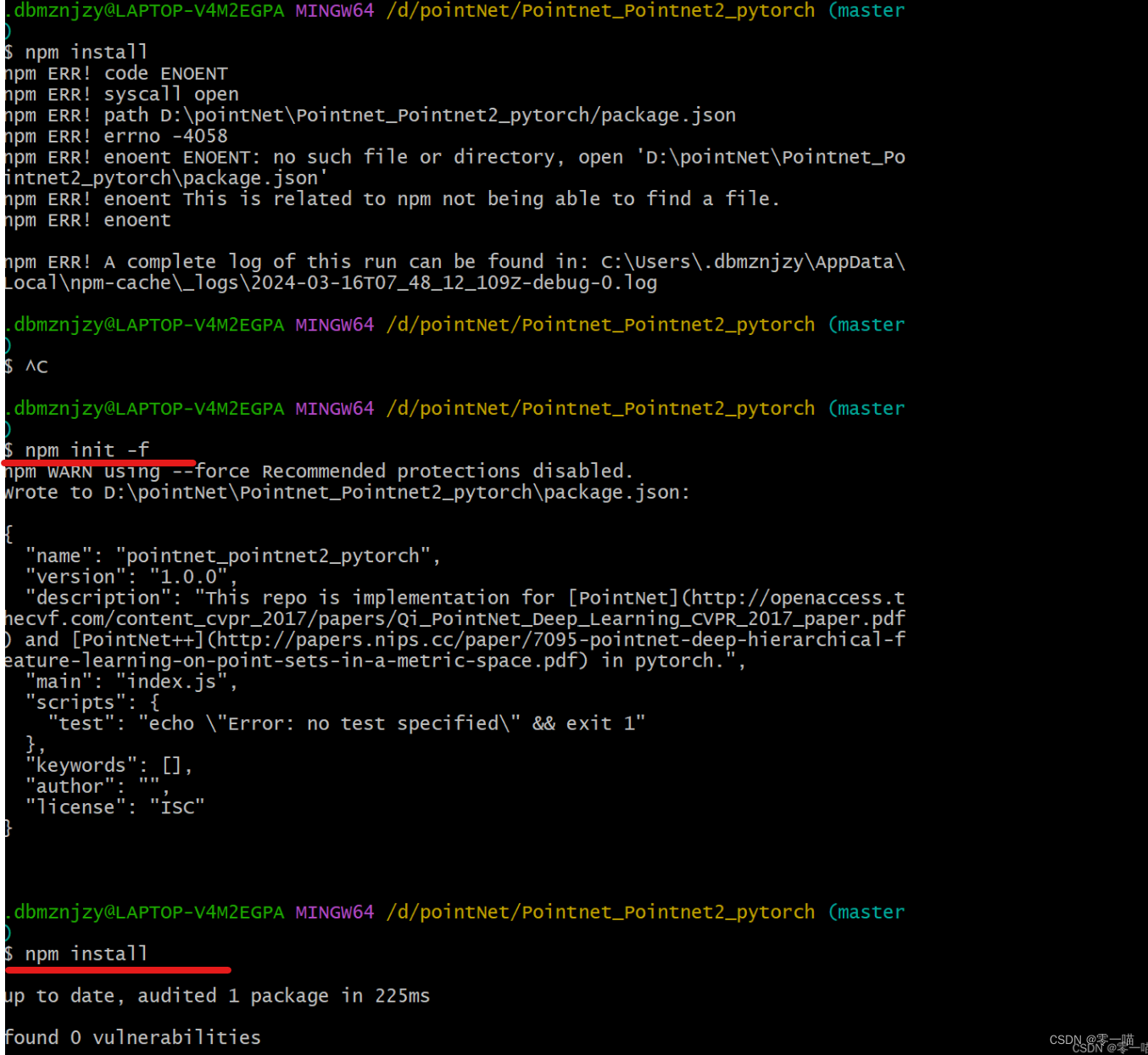
会在你的项目文件夹里看到node_modules文件 即成功
下载ModelNet40数据集
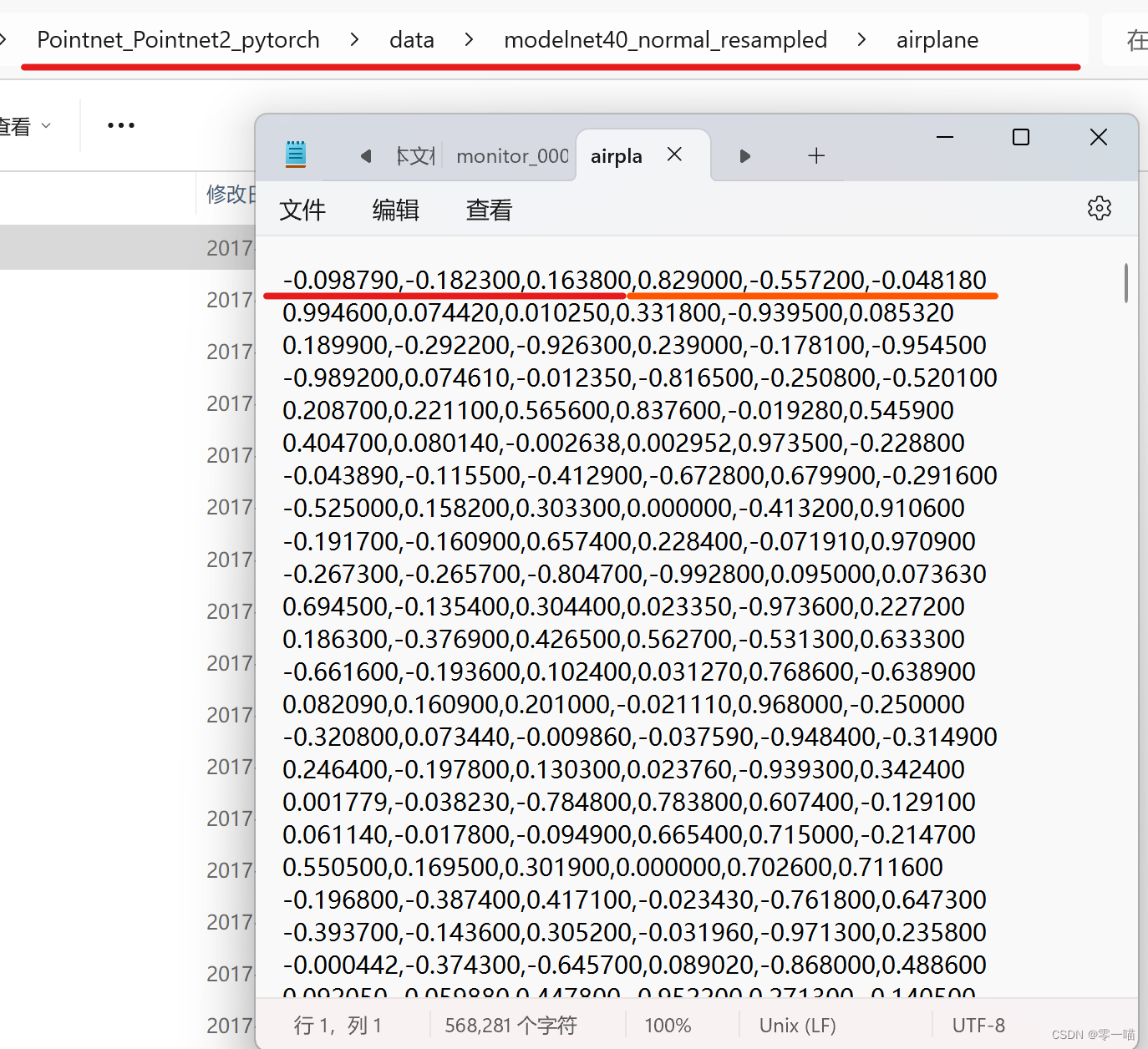
ModelNet40数据集
格式:txt
打开看看:顺便看看路径 别放错啦
红色是X Y Z 橙色是 normal features
将下载路径置于项目文件 新建的 data文件夹里
(备注:下载过慢可以安装IDM Internet Download Manager软件和插件到浏览器)
打开Anaconda Prompt 配置环境
激活虚拟环境 安装相应包
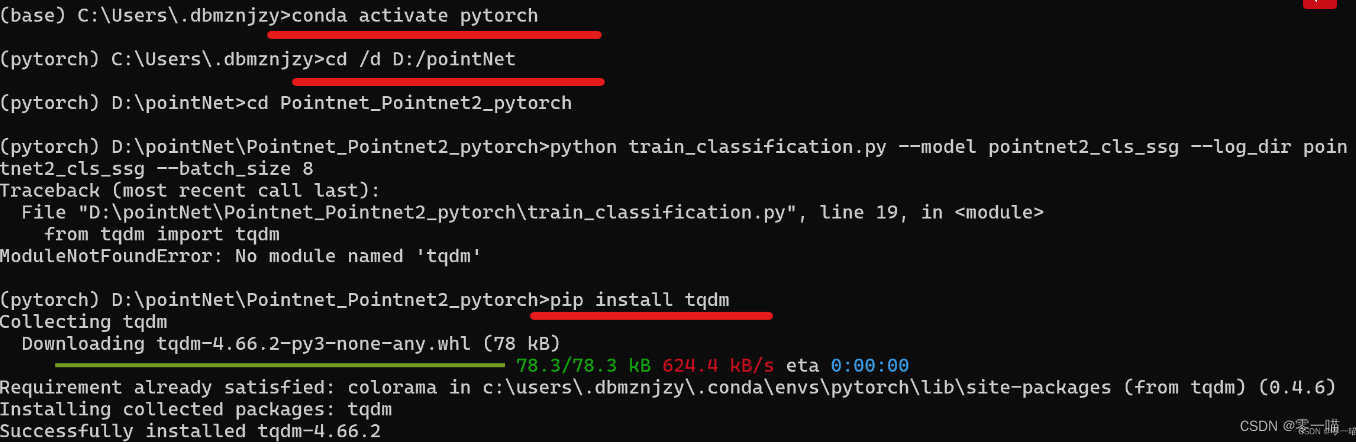
conda activate pytorch
(pytorch是我命名虚拟环境的名字 这里默认大家虚拟环境安装好了)
cd /d <目标路径>
也就是项目文件所在路径 同前面的路径
以tqdm为例
pip install tqdm
运行代码
README里面有简介 比如想用的模型(pointNet 还是pointNet ++(的ssg 还是msg )) 以及用的数据集、是否用法向量(除了xyz以外的三个特征)用不用gpu 此外还要记得给定batch_size
示例:
python train_classification.py --model pointnet2_cls_ssg --log_dir pointnet2_cls_ssg --batch_size 8 --use_cpu
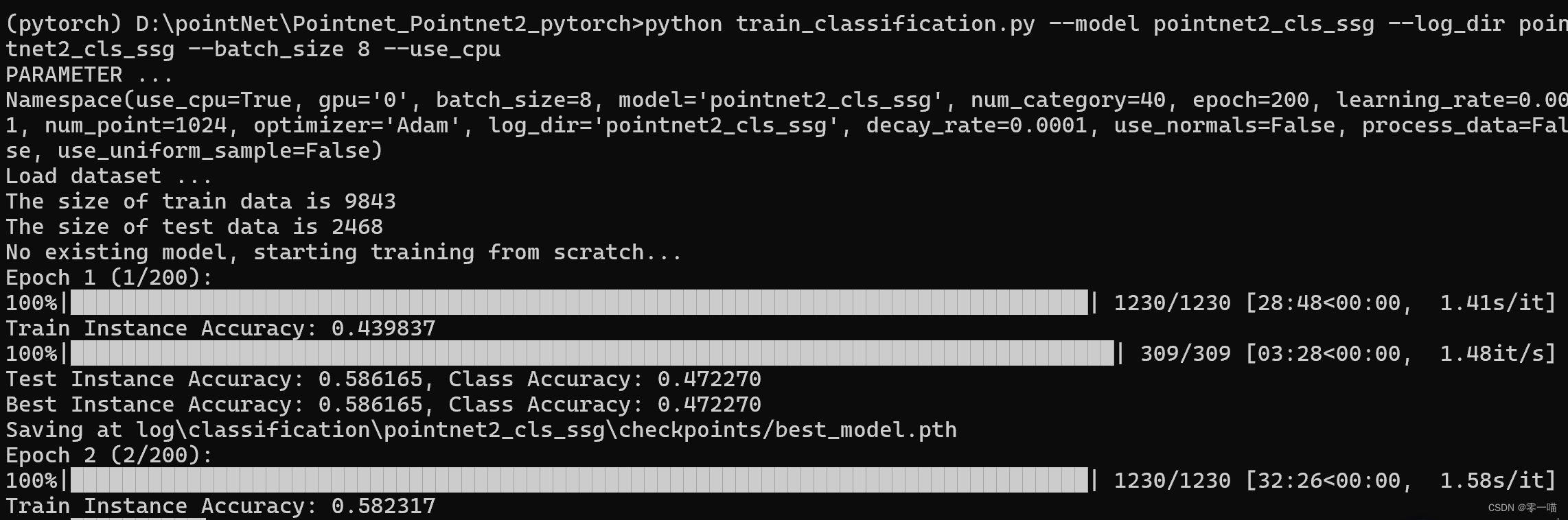
There you go !!!
但是实在跑的太慢了QAQ
后续可能会出服务器使用教程!欢迎关注~















 1114
1114











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









