







接下来我们布置场景,我们的预期结果(功能分析)是:
坦克沿路径循环移动
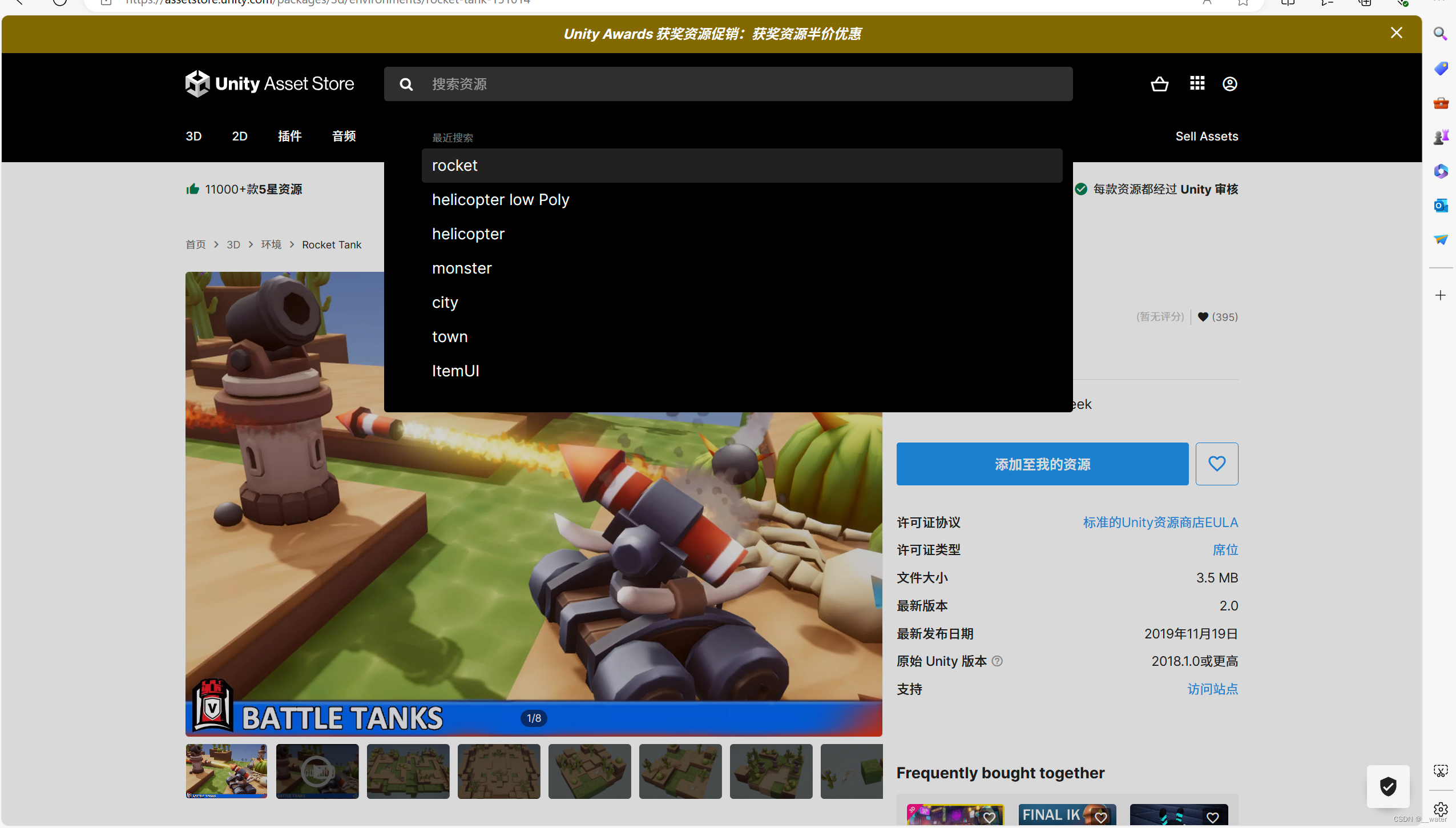
首先进入资源商店准备下载角色模型资源,
搜索Rocket
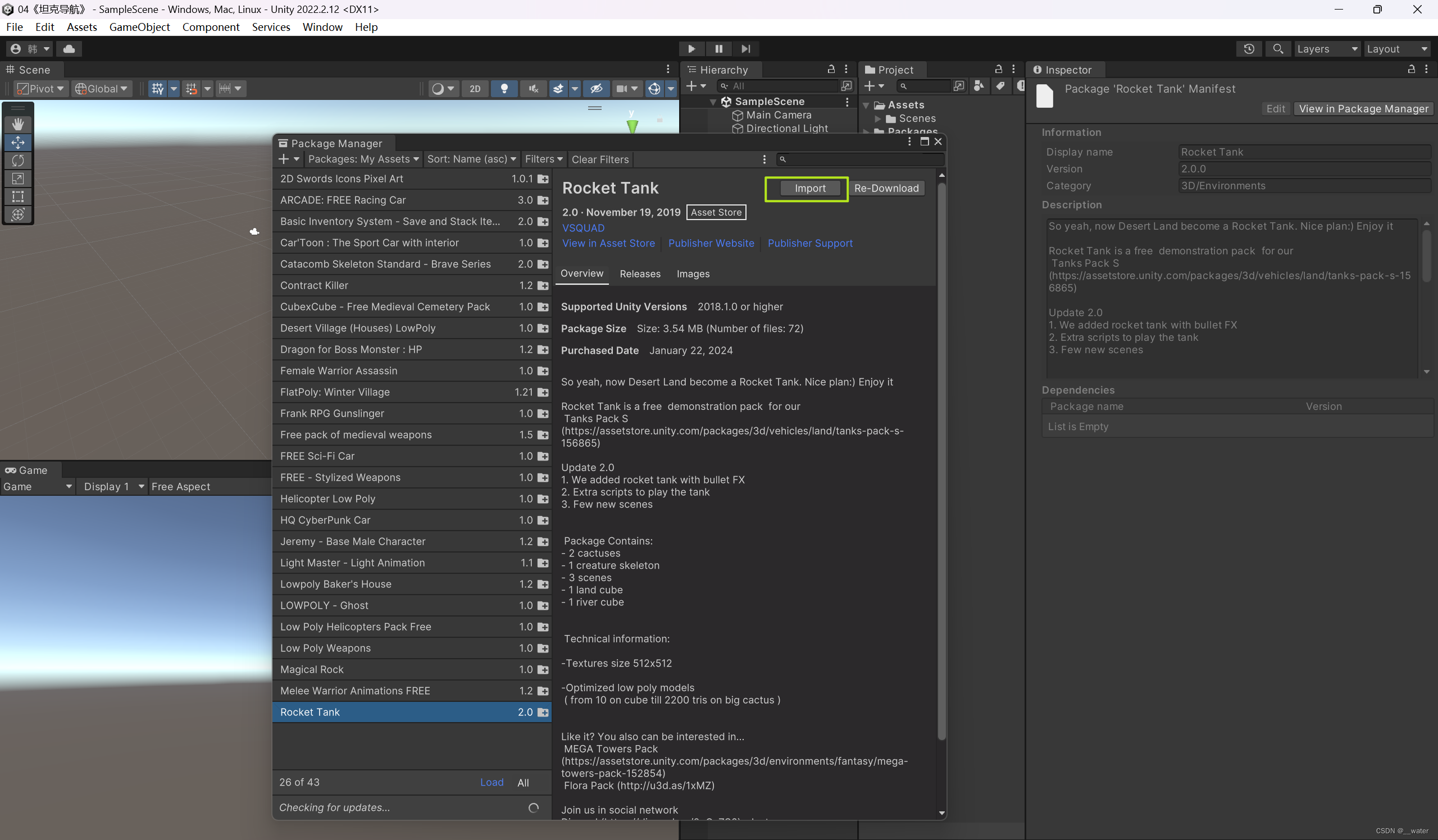
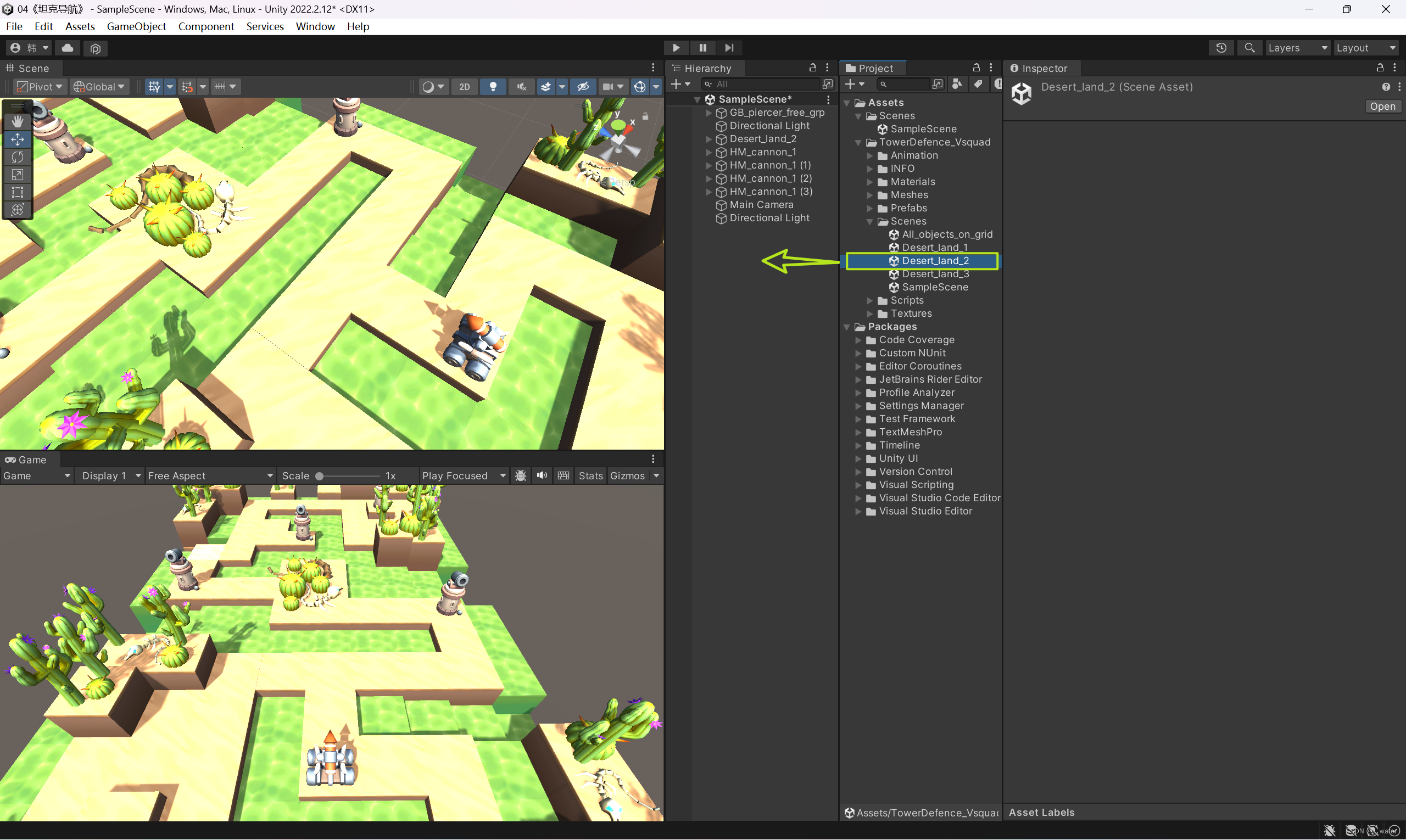
选择场景里的Desert_land_2场景模板 放入Hierarchy,完全解压缩后再拖拽至场景中,
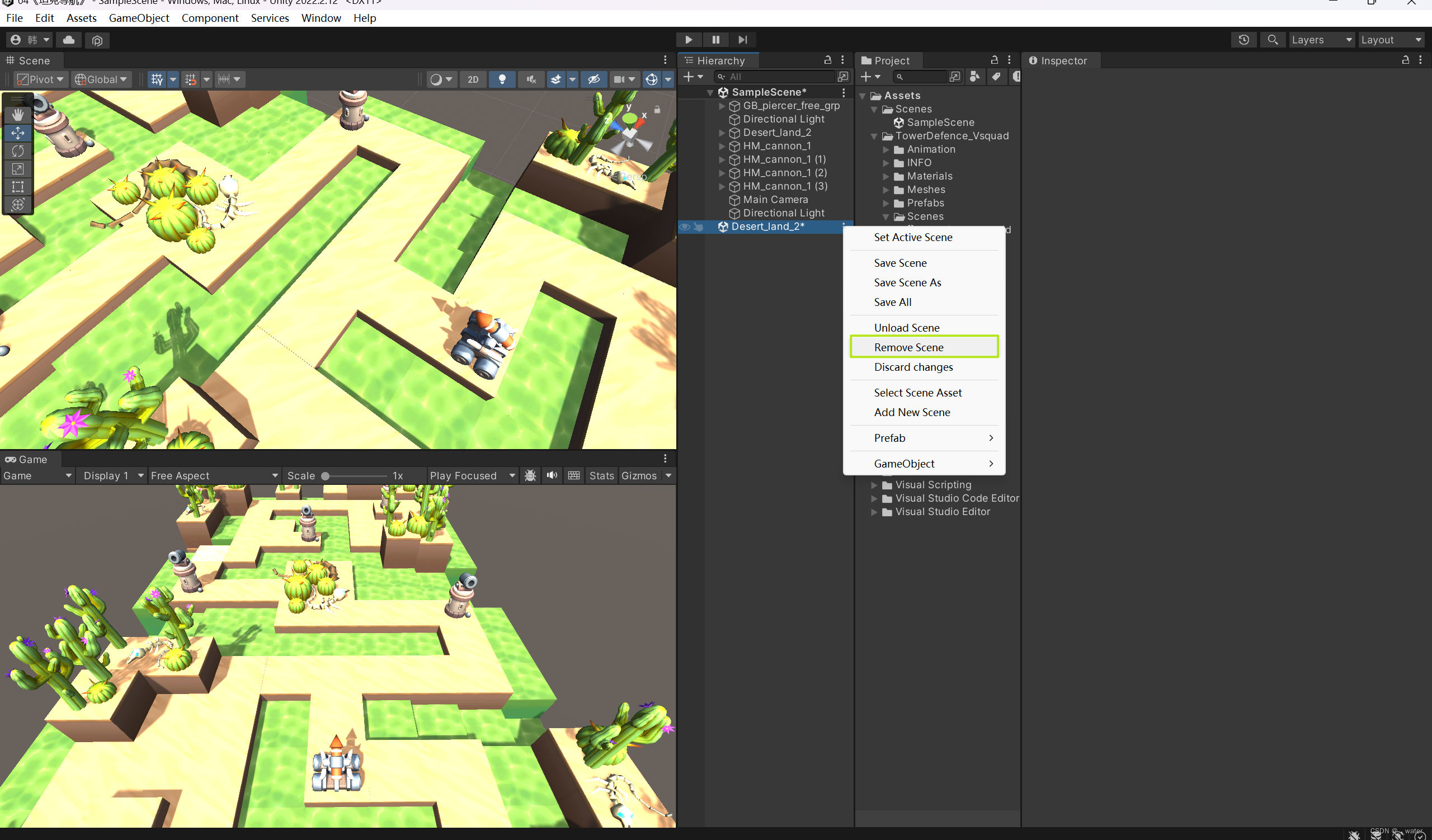
移动资源场景物体后,将导入场景删除,
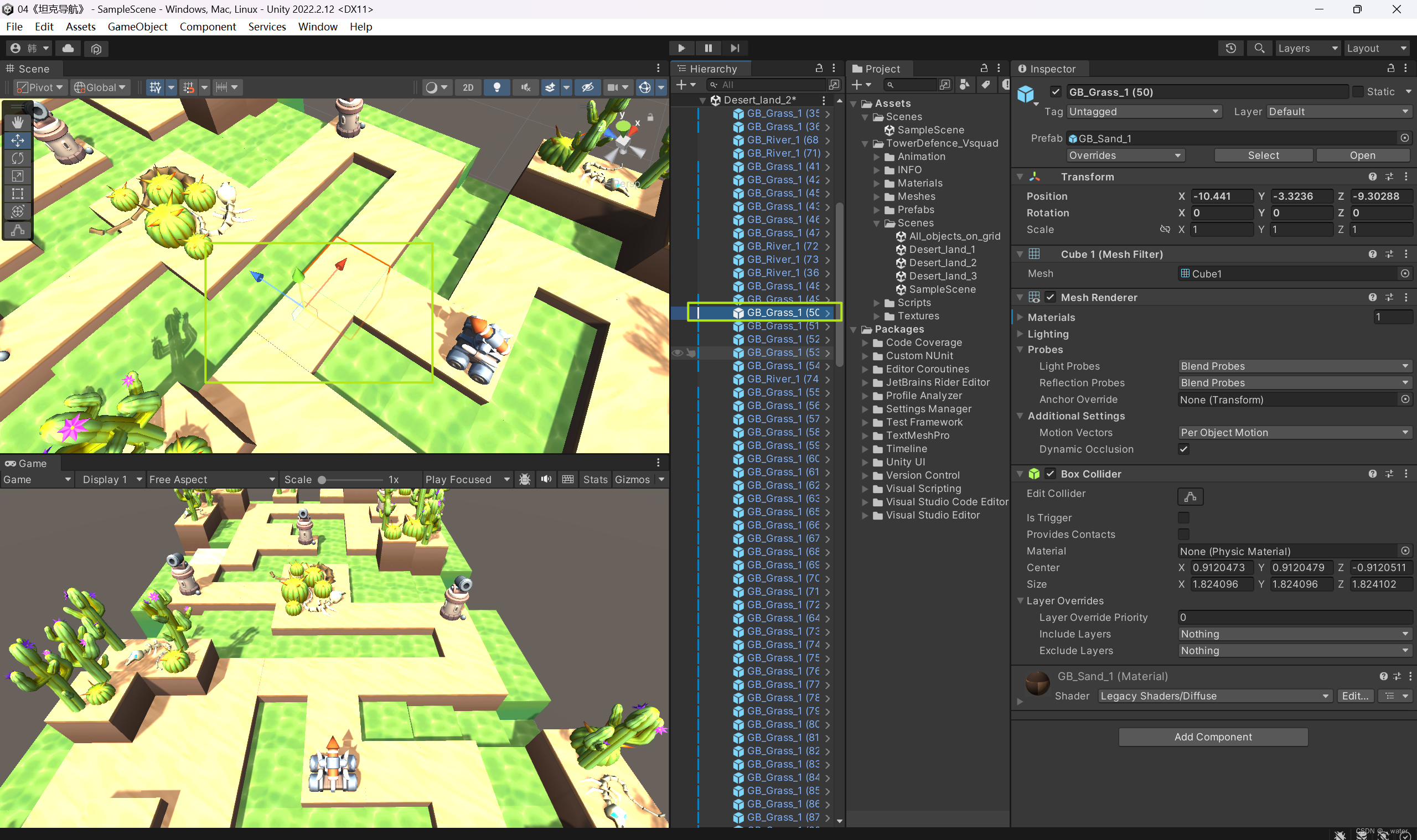
选择地形中第50块砖ctrl + d 后将空缺连接成循环回路,
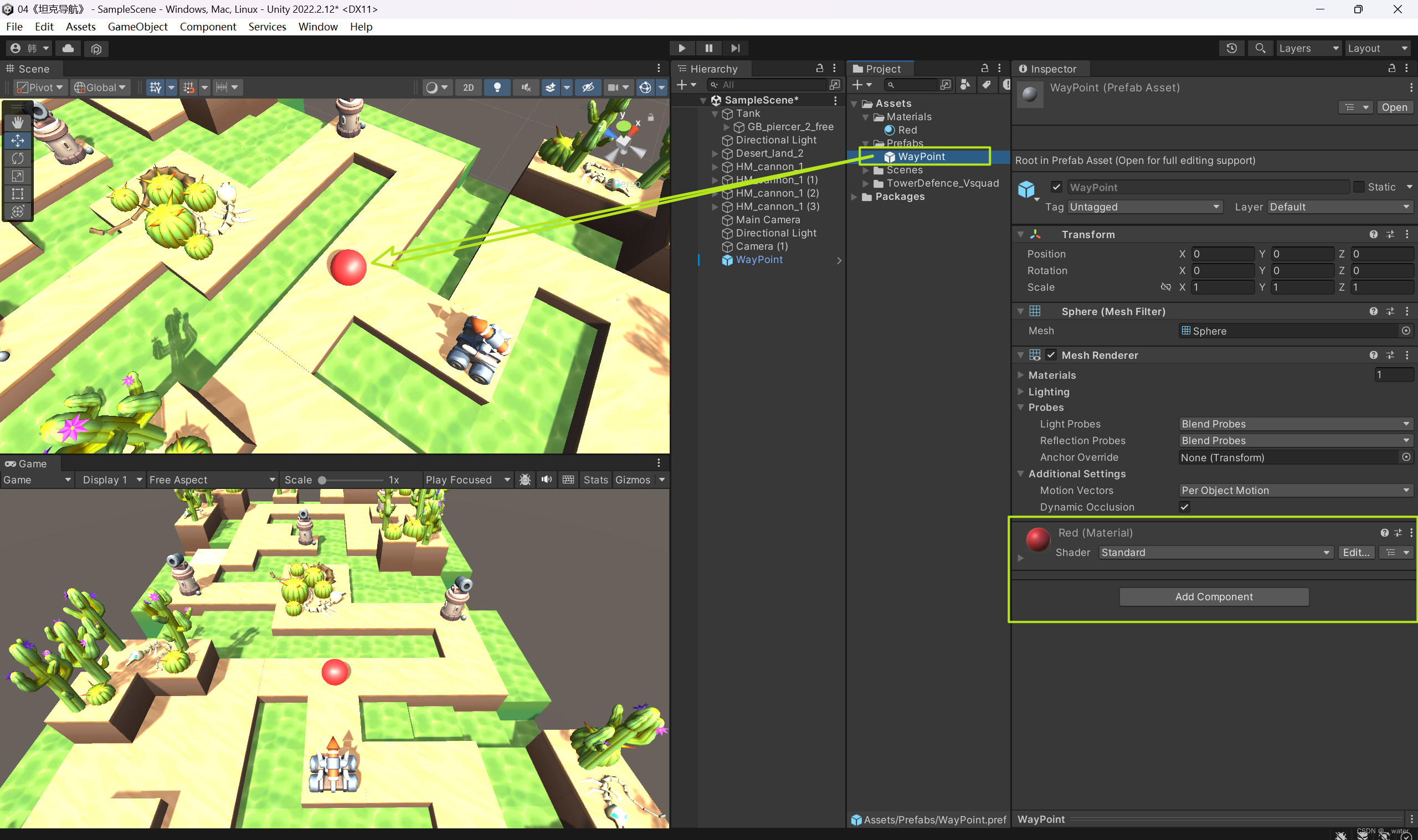
我们通过使小球作为引导使坦克进行导航,所以先创建3D小球作为预制体引导,
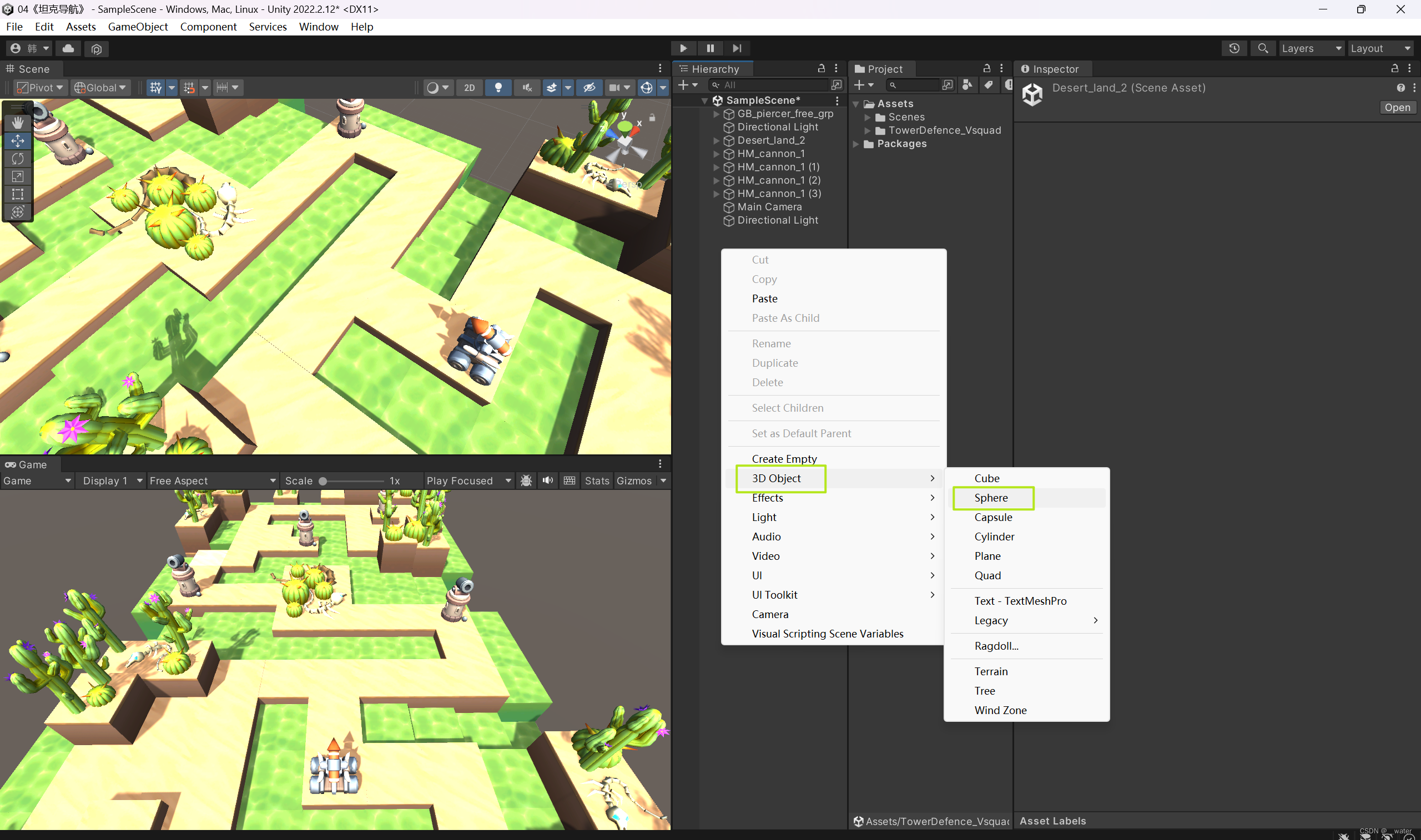
并起名字叫WayPoint
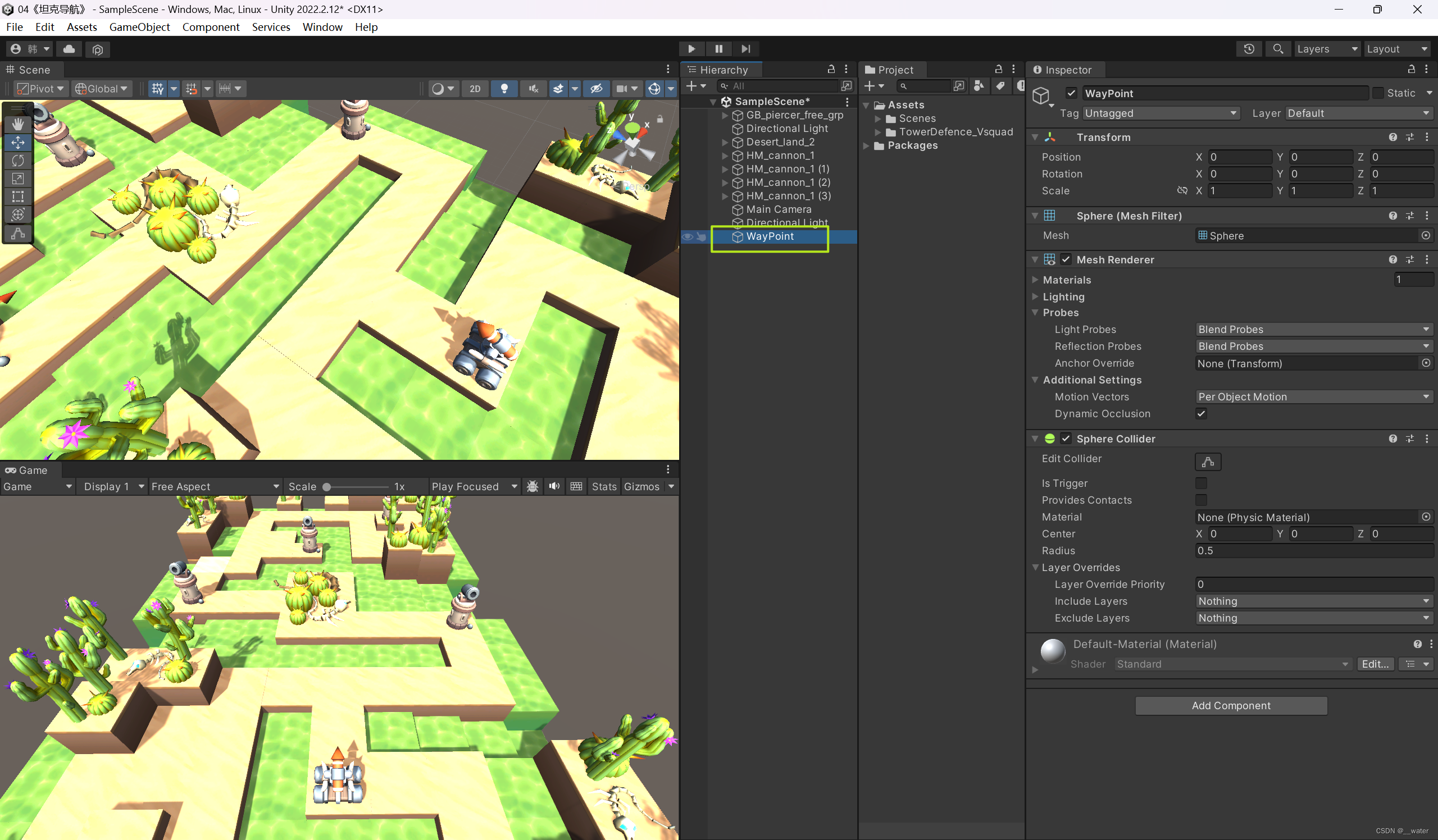
为了防止小球本身带的碰撞器使坦克产生力的作用,将碰撞器组件在小球身上移除,

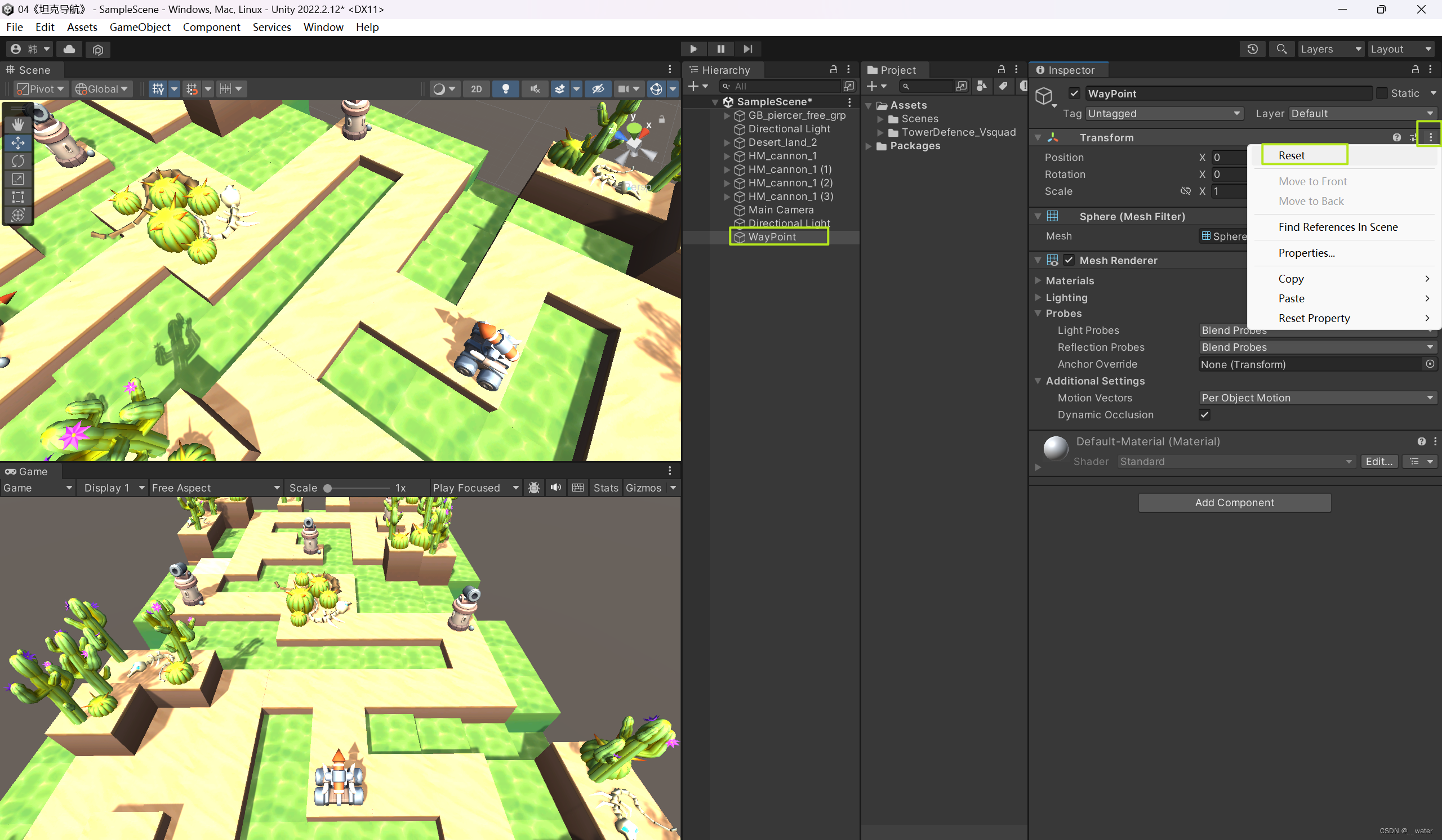
将小球位置归零,
创建预制体文件夹Prefabs,并将路径点WayPoint放进预制体文件夹,删除场景中的WayPoint,

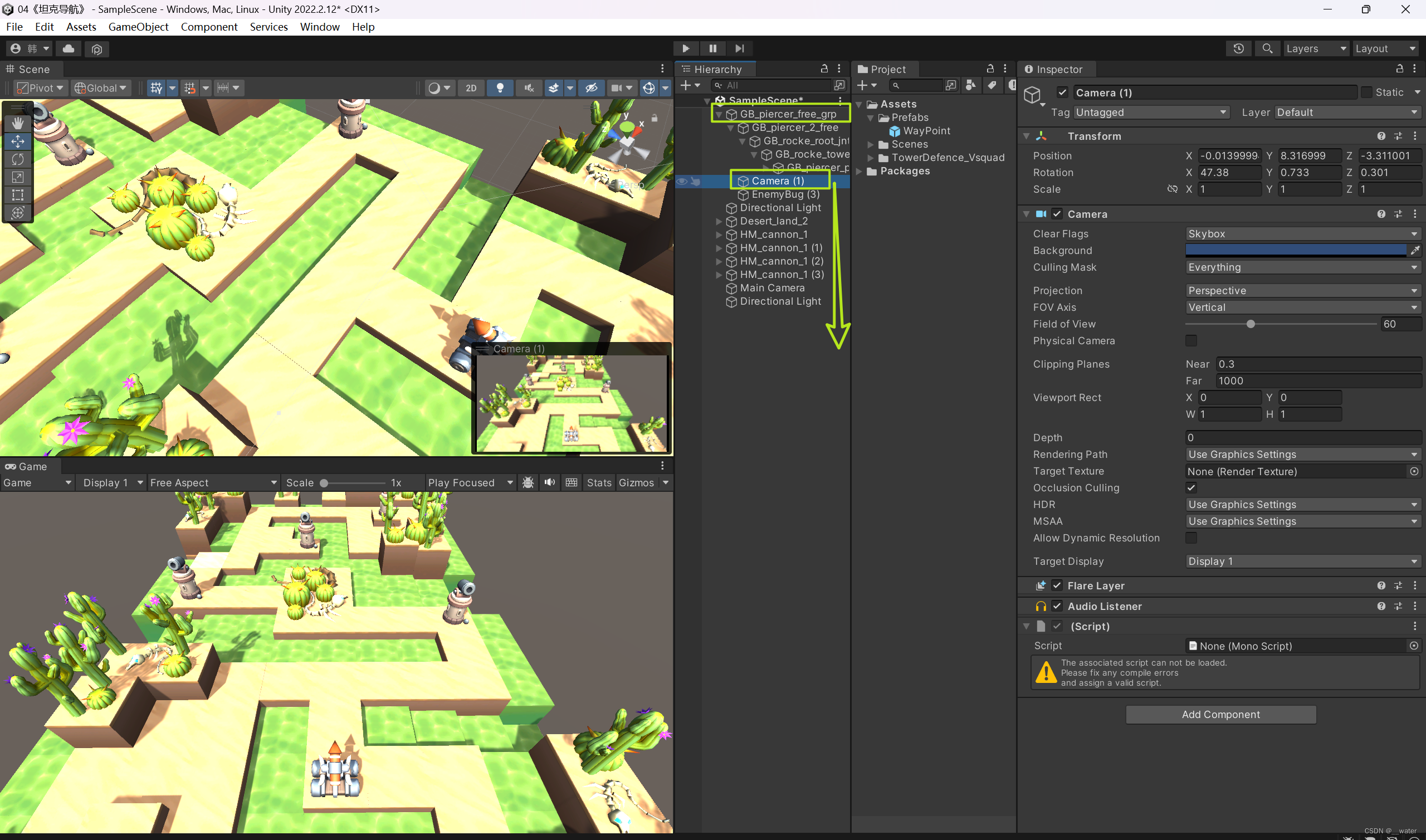
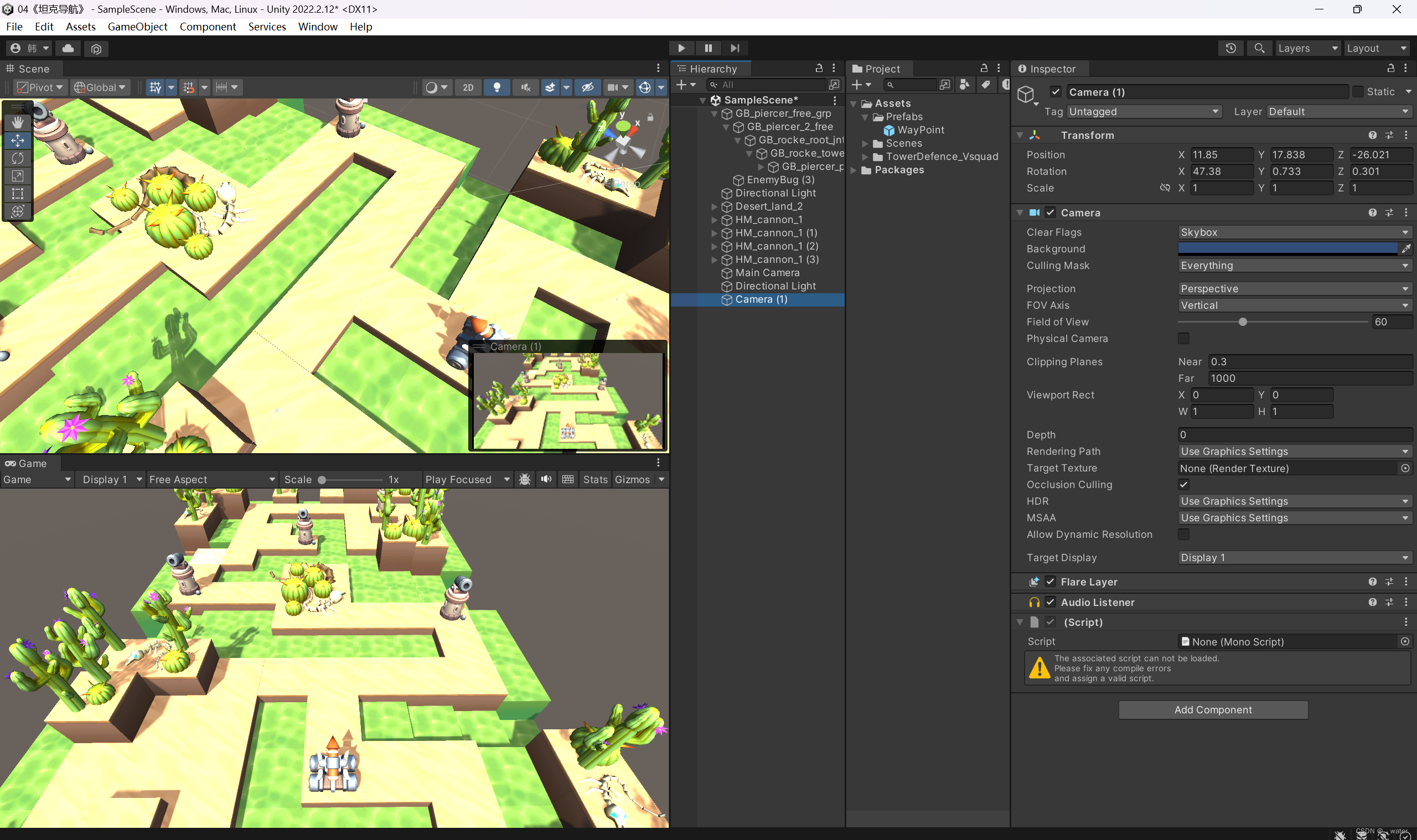
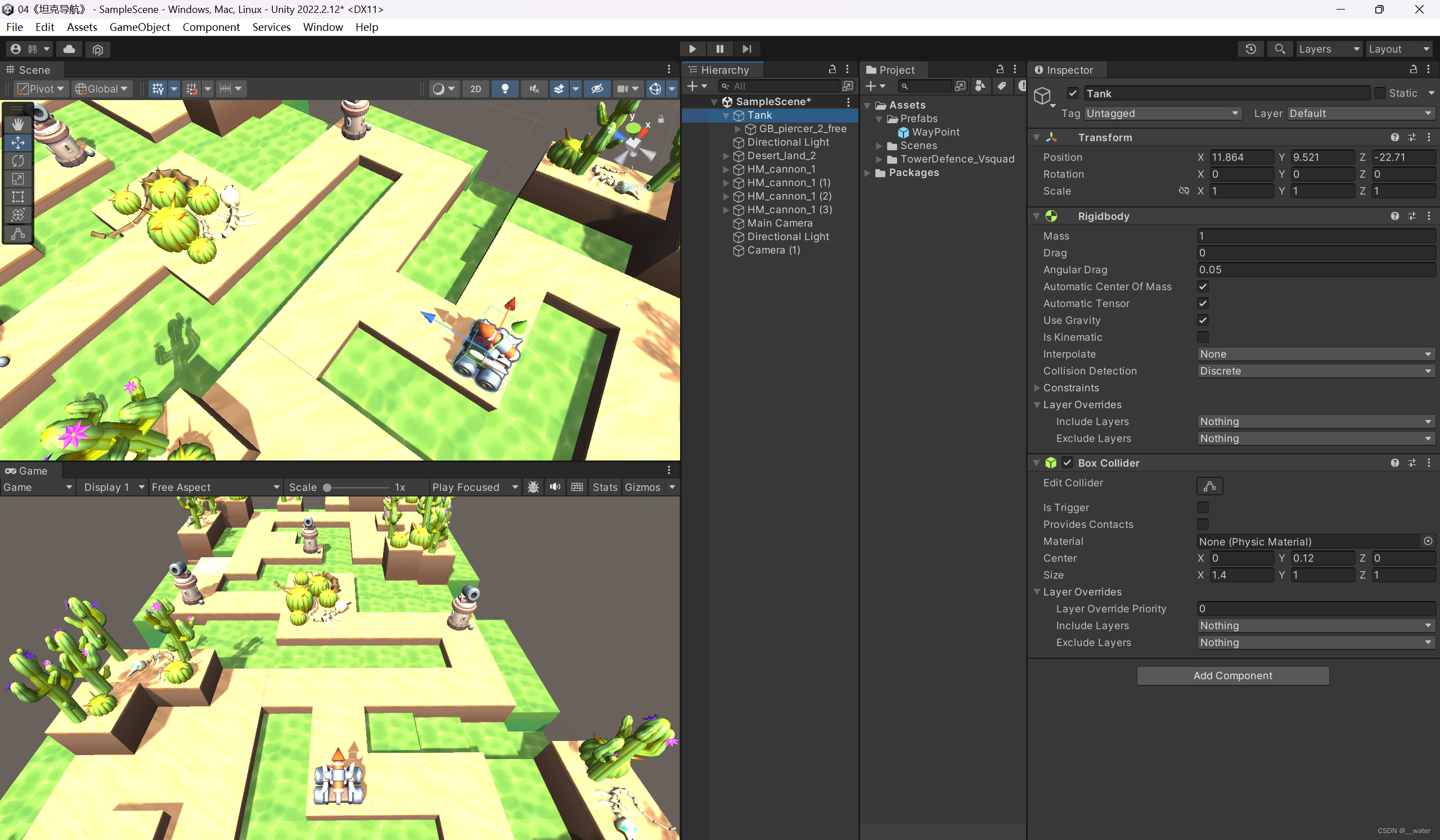
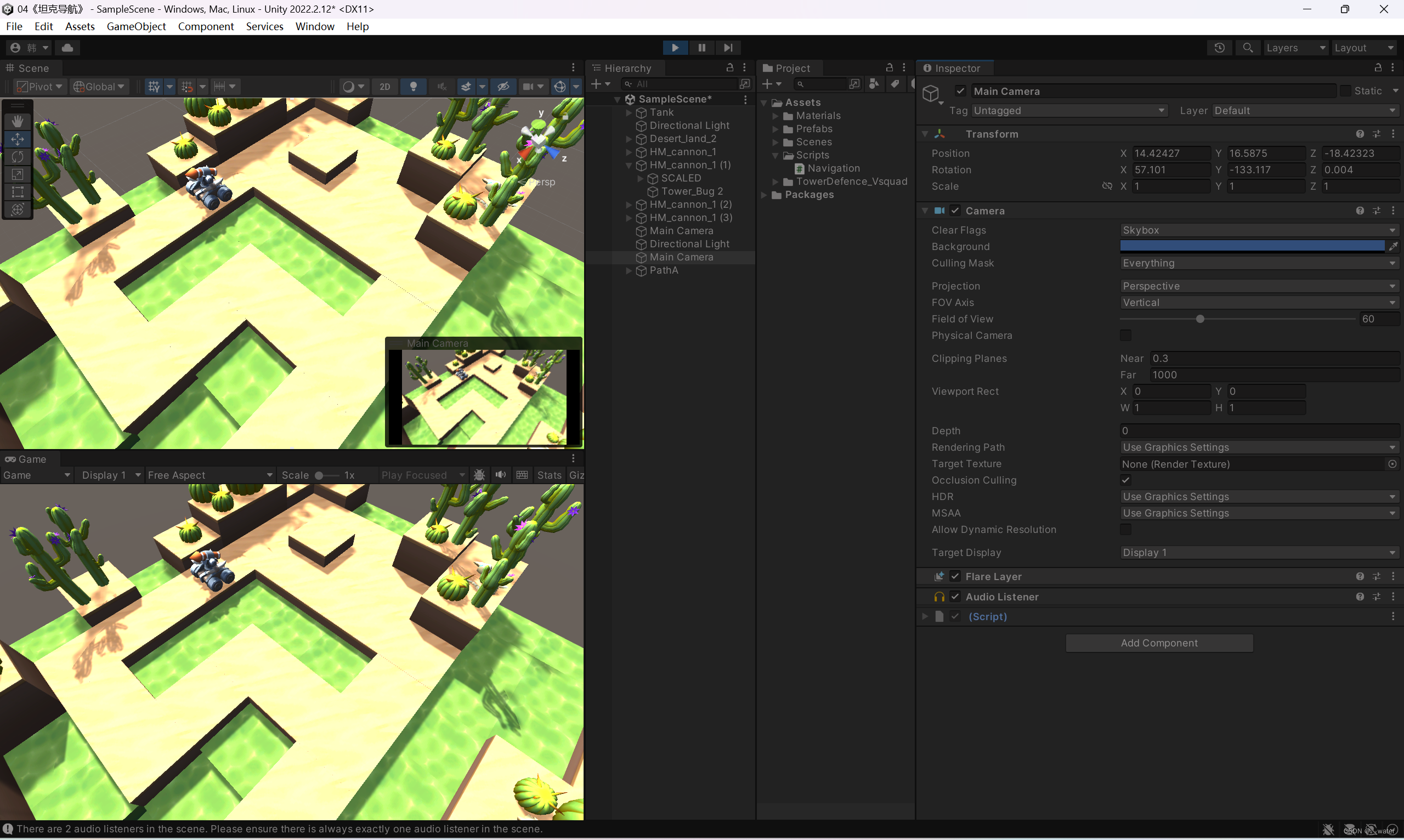
将坦克物体的子物体摄像机Camera拖拽出来,
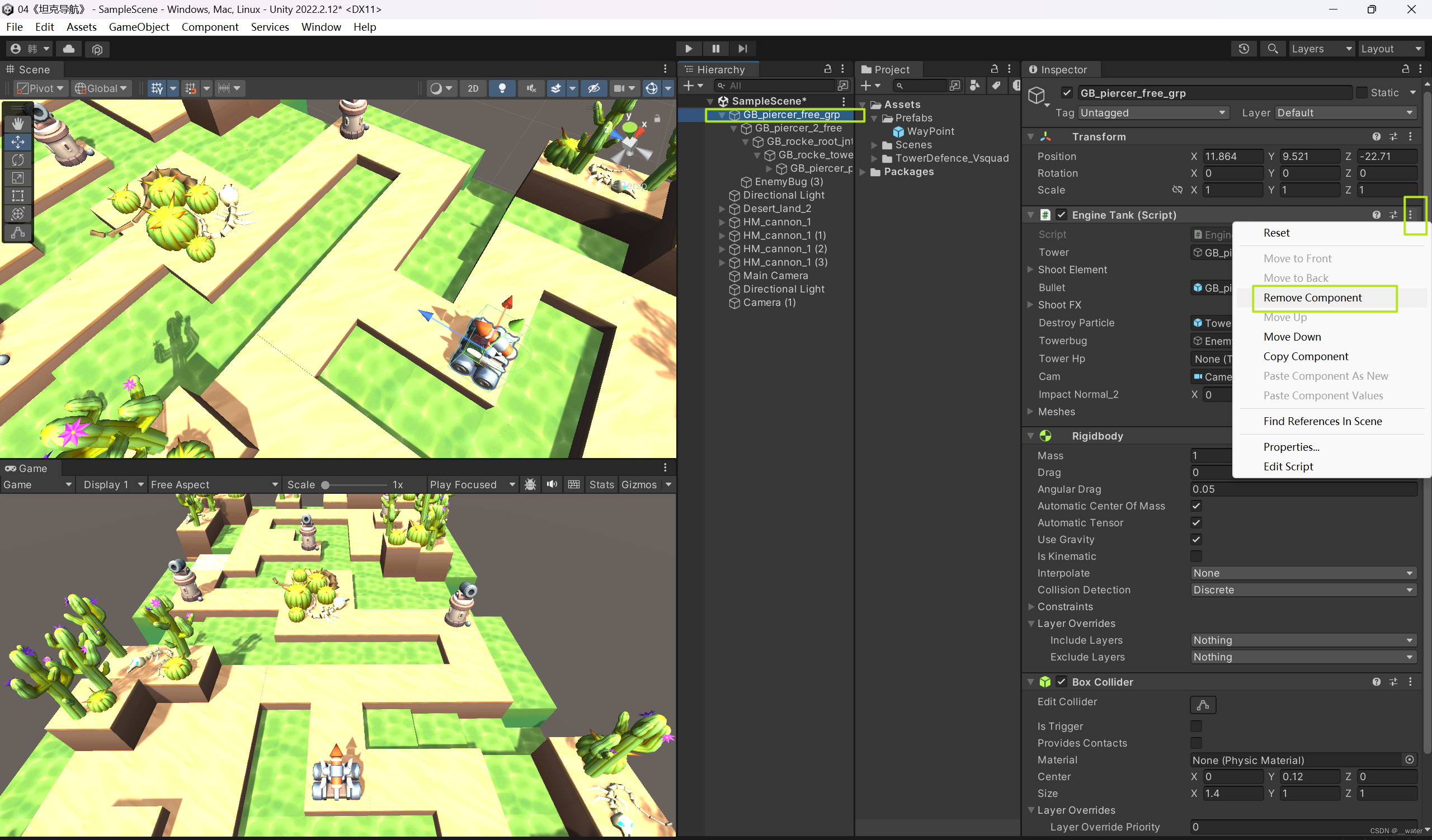
删除坦克物体自带脚本,
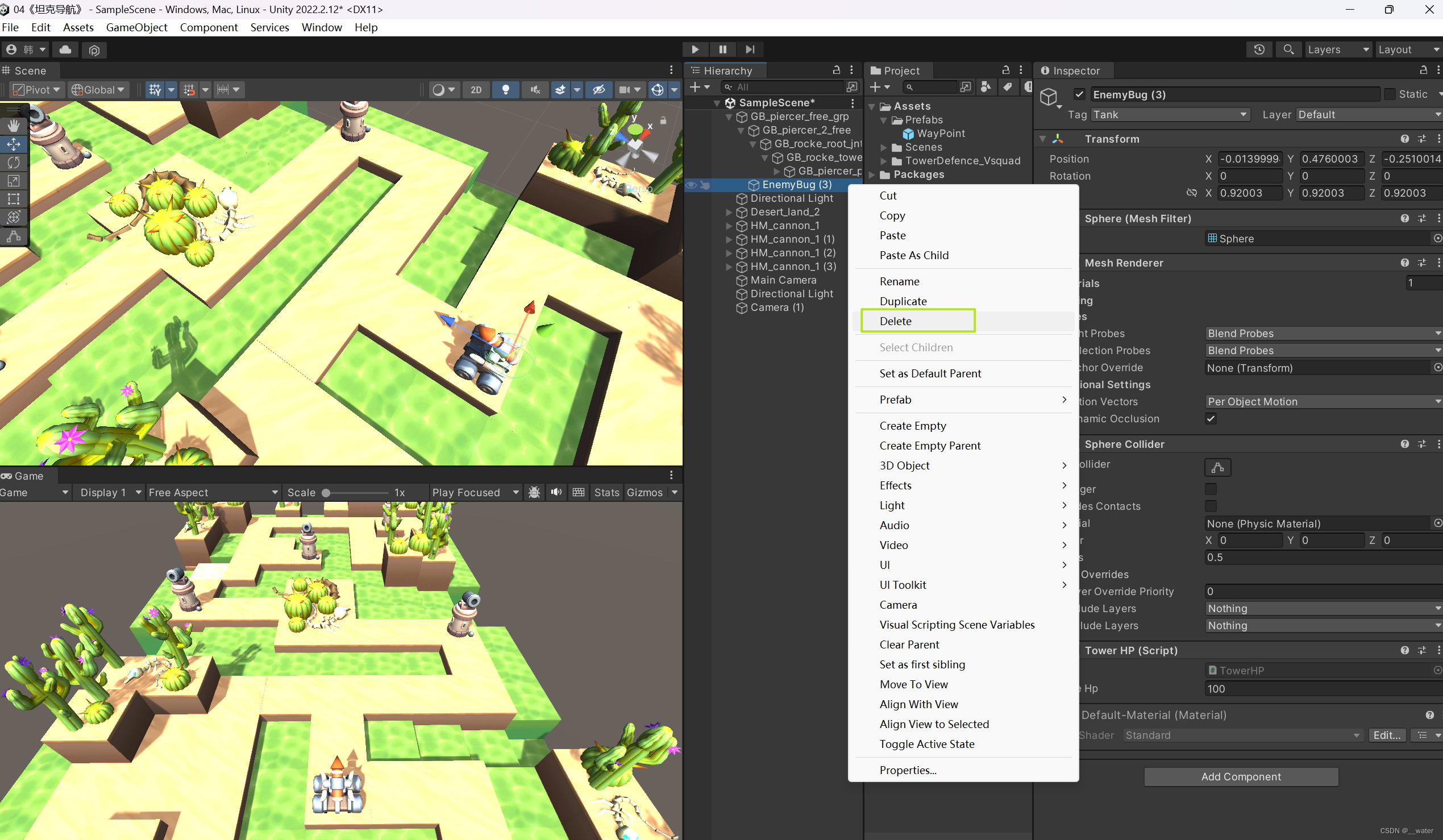
删除坦克组件里血条组件,
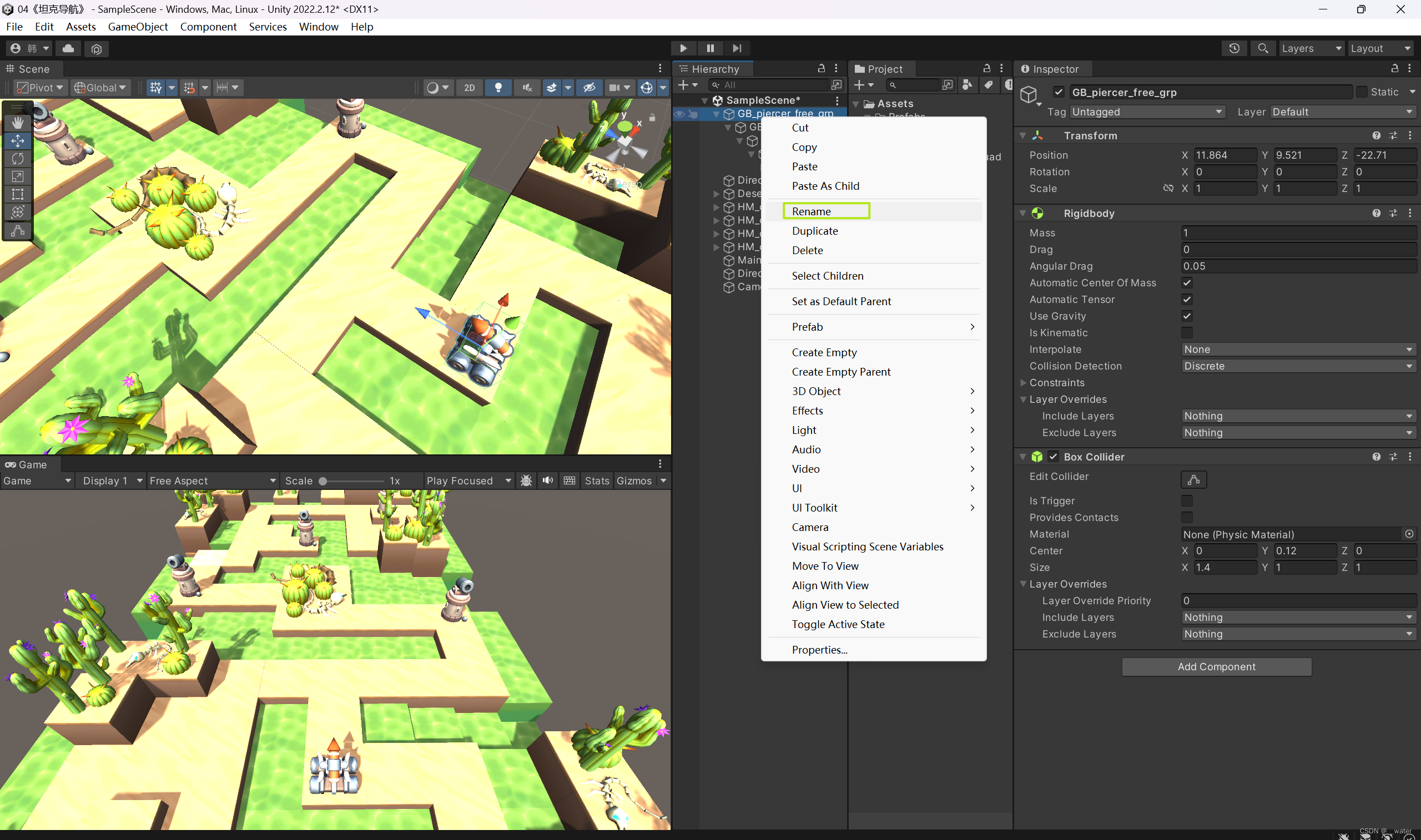
将坦克对象起名字为Tank,
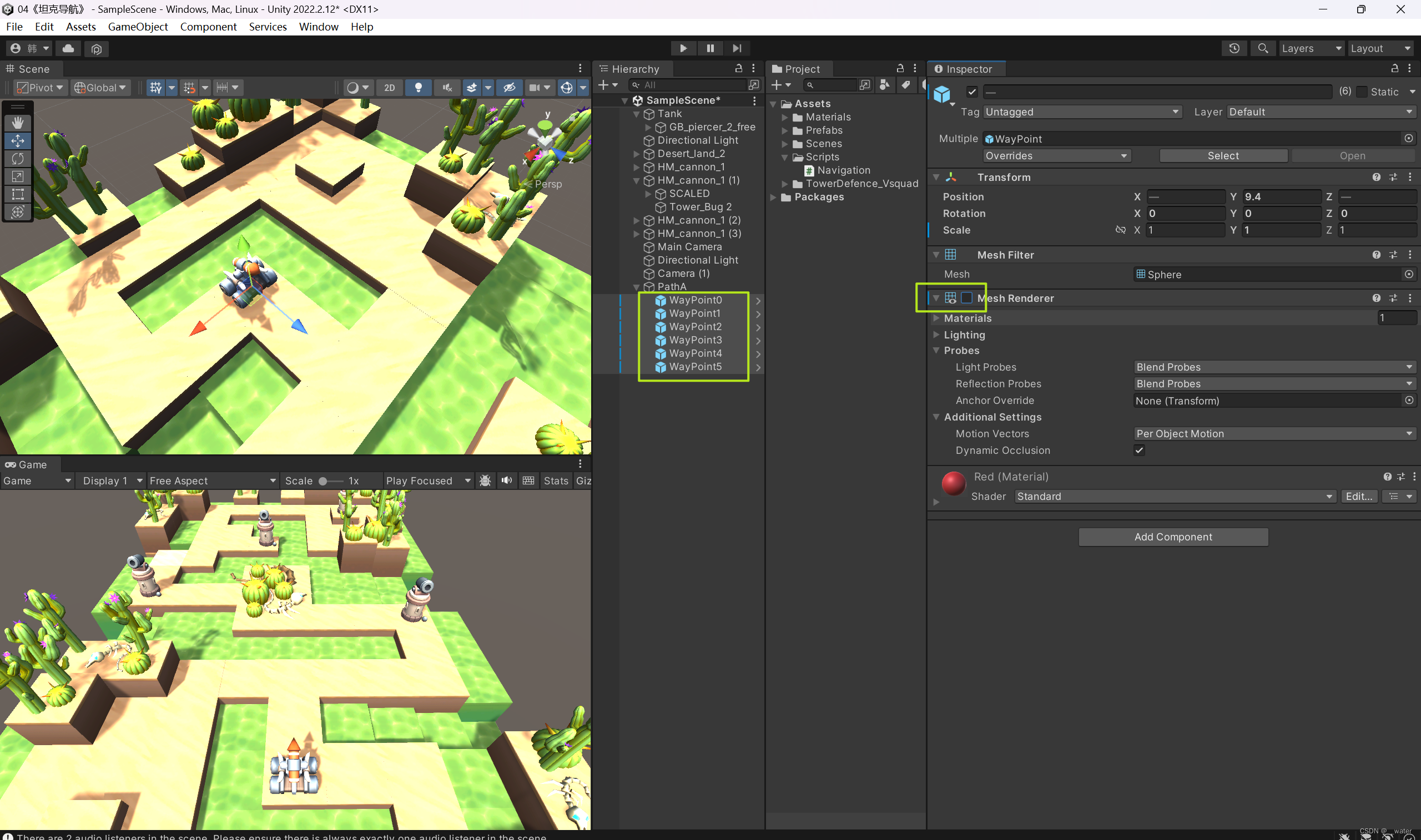
将小球预制体添加Material组件设置为红色红,拖拽至场景中,
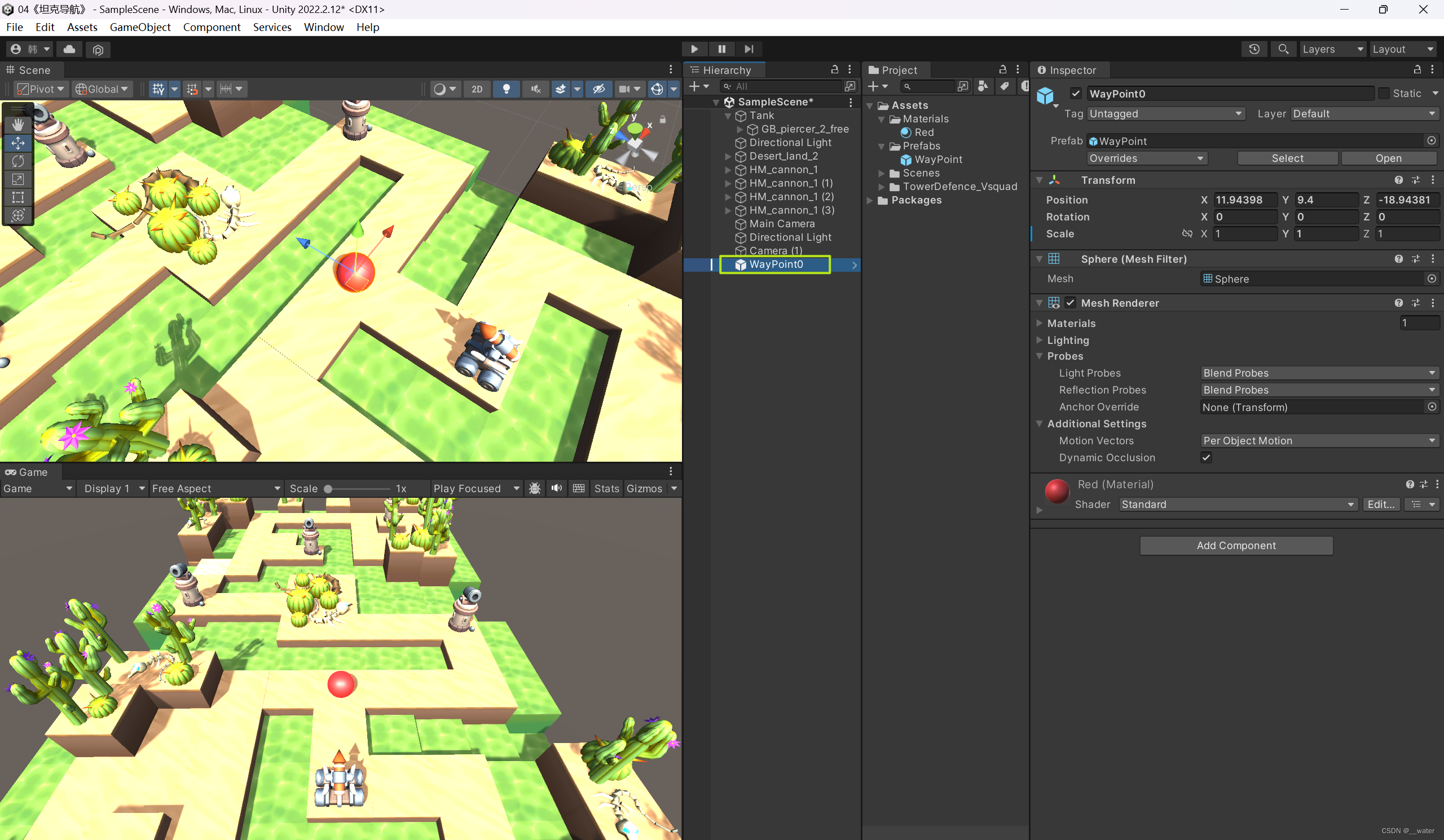
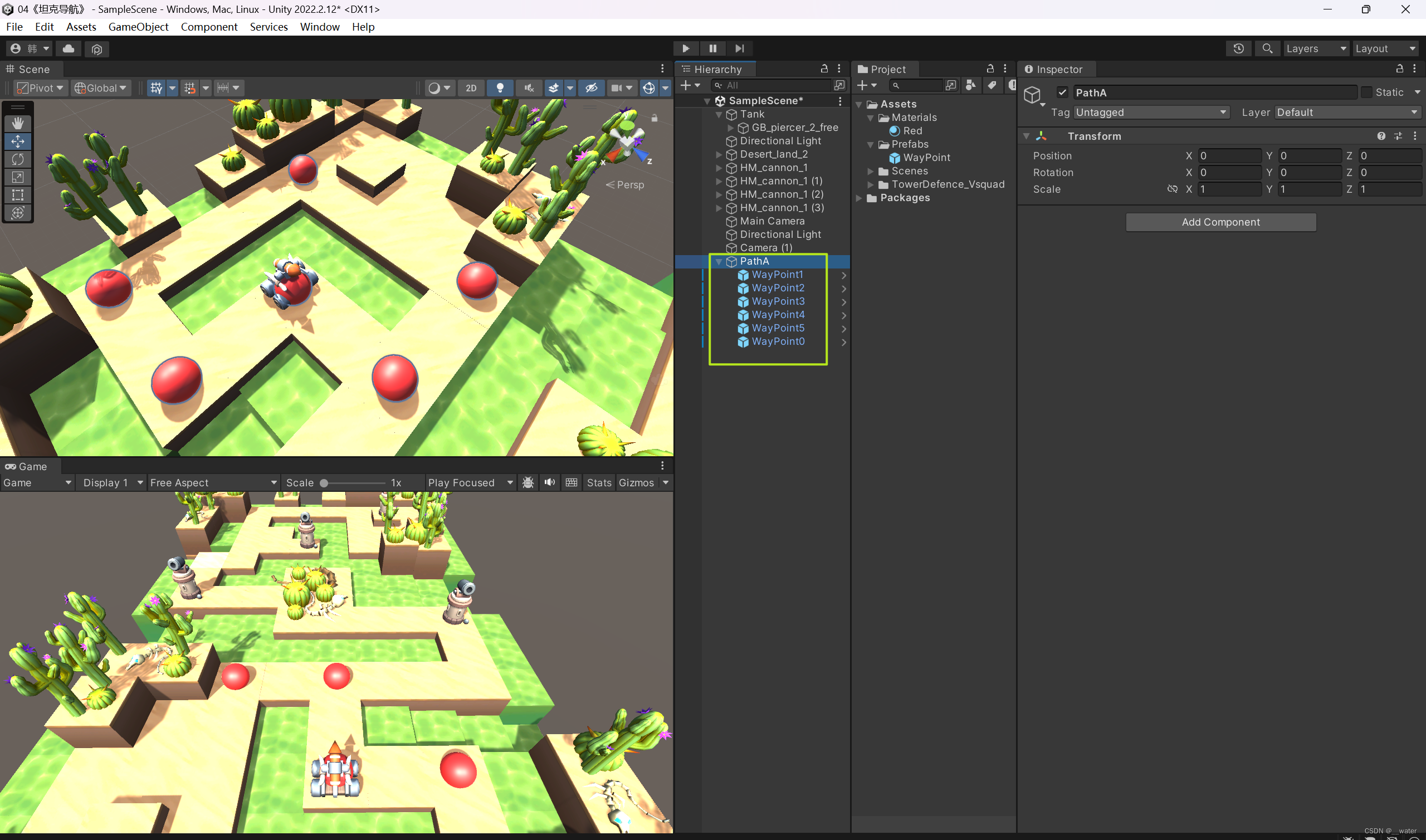
将小球改名为WayPoint0
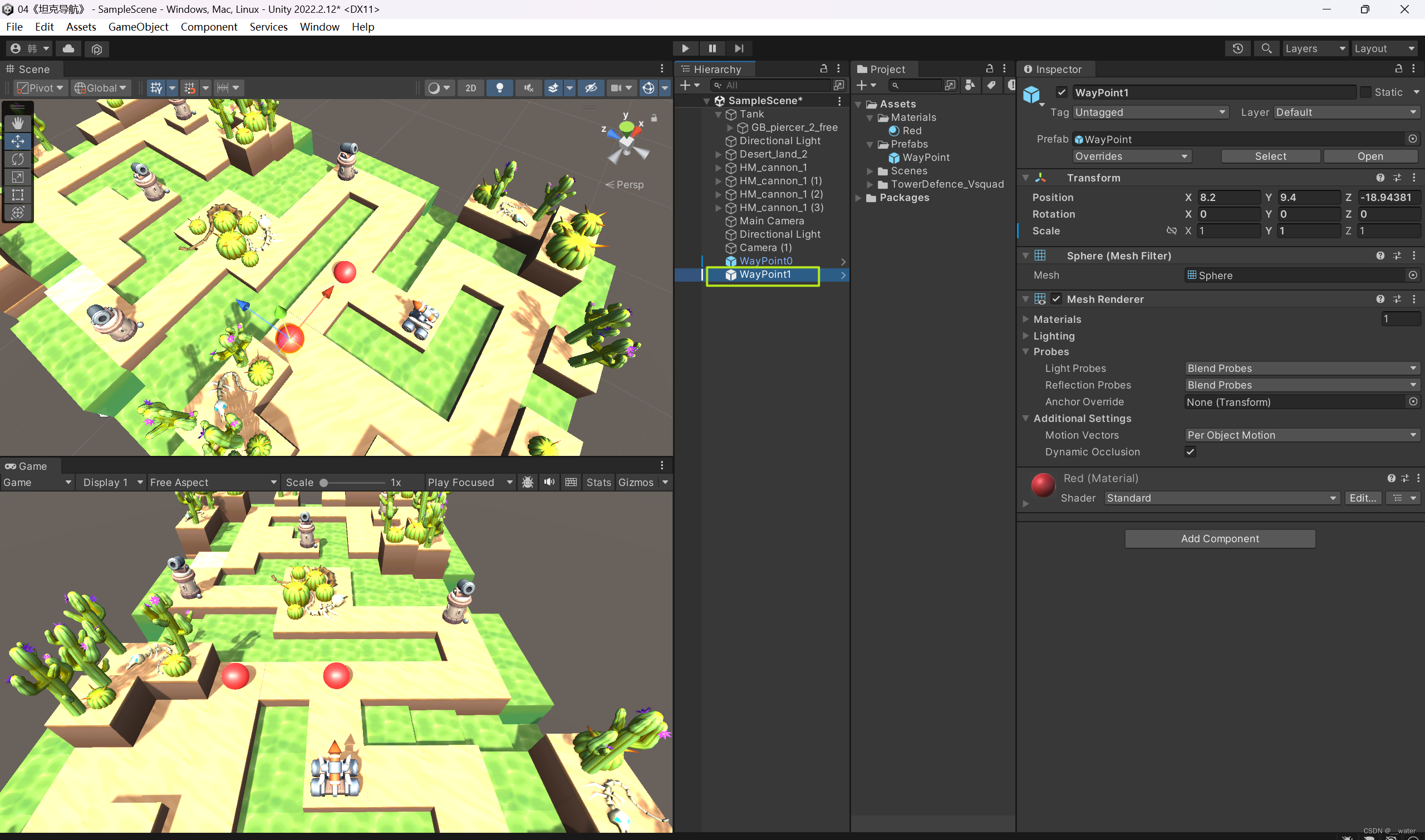
ctrl + d 复制 改名为WayPoint1
ctrl + d 复制 改名为WayPoint2
ctrl + d 复制 改名为WayPoint3
ctrl + d 复制 改名为WayPoint4
ctrl + d 复制 改名为WayPoint5,构成循环回路
在WayPoint0路径点0右键创建空父物体命名为PathA路径A,

将其他路径点1-5拖拽至PathA作为子物体,
命名为PathA路径A,
新建脚本命名为导航Navigation

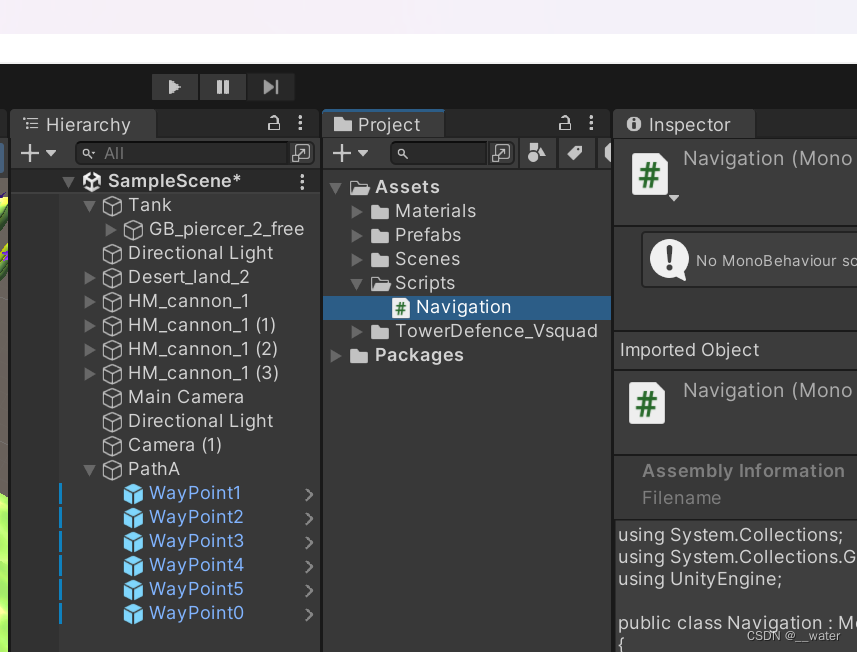
双击脚本编写代码:
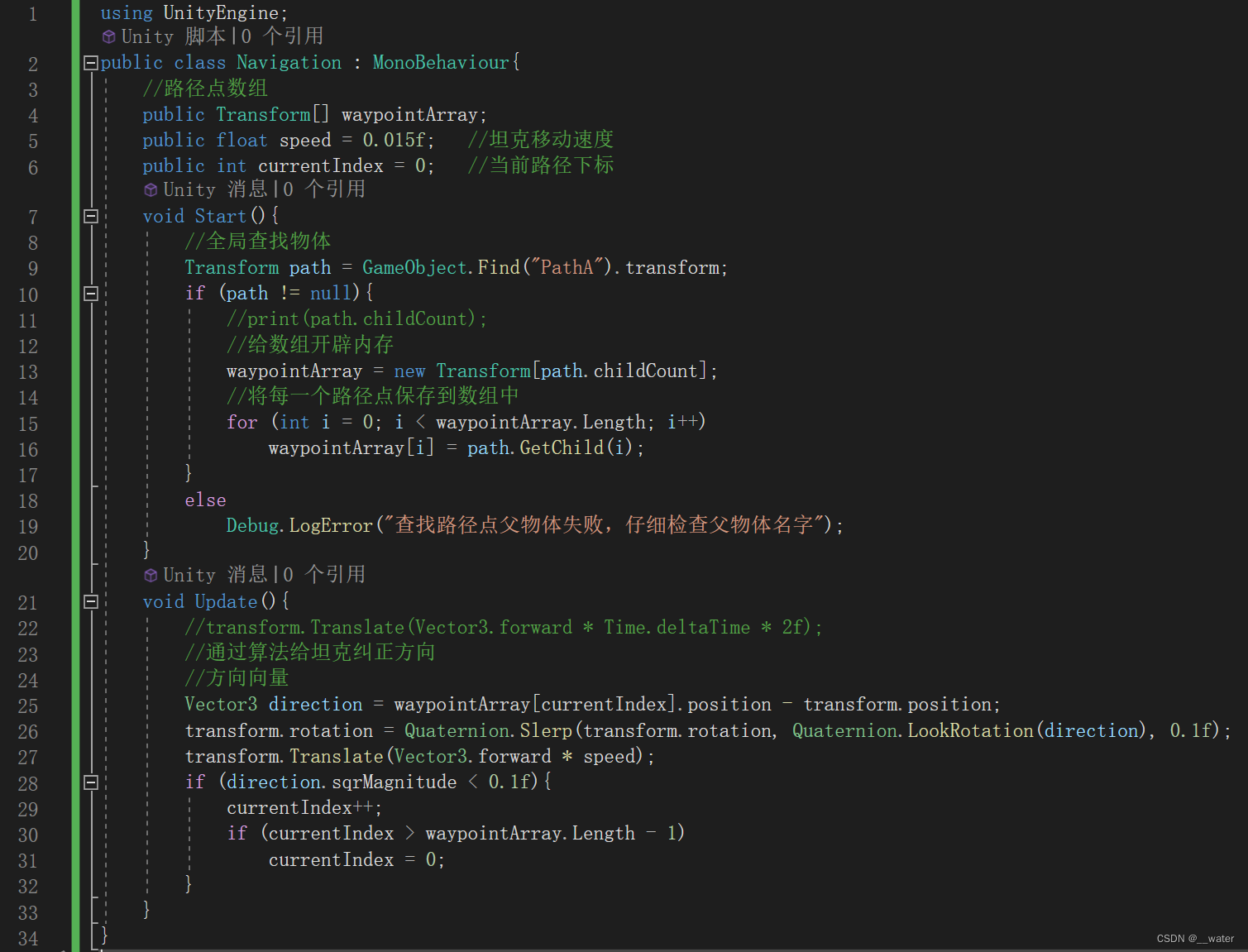
using UnityEngine;
public class Navigation : MonoBehaviour{
//路径点数组
public Transform[] waypointArray;
public float speed = 0.015f; //坦克移动速度
public int currentIndex = 0; //当前路径下标
void Start(){
//全局查找物体
Transform path = GameObject.Find("PathA").transform;
if (path != null){
//print(path.childCount);
//给数组开辟内存
waypointArray = new Transform[path.childCount];
//将每一个路径点保存到数组中
for (int i = 0; i < waypointArray.Length; i++)
waypointArray[i] = path.GetChild(i);
}
else
Debug.LogError("查找路径点父物体失败,仔细检查父物体名字");
}
void Update(){
//transform.Translate(Vector3.forward * Time.deltaTime * 2f);
//通过算法给坦克纠正方向
//方向向量
Vector3 direction = waypointArray[currentIndex].position - transform.position;
transform.rotation = Quaternion.Slerp(transform.rotation, Quaternion.LookRotation(direction), 0.1f);
transform.Translate(Vector3.forward * speed);
if (direction.sqrMagnitude < 0.1f){
currentIndex++;
if (currentIndex > waypointArray.Length - 1)
currentIndex = 0;
}
}
}
将导航脚本挂载在Tank物体上,

观察PathA路径是否0-5顺序进行,
注意:WayPoint路径点由上至下执行,注意摆放顺序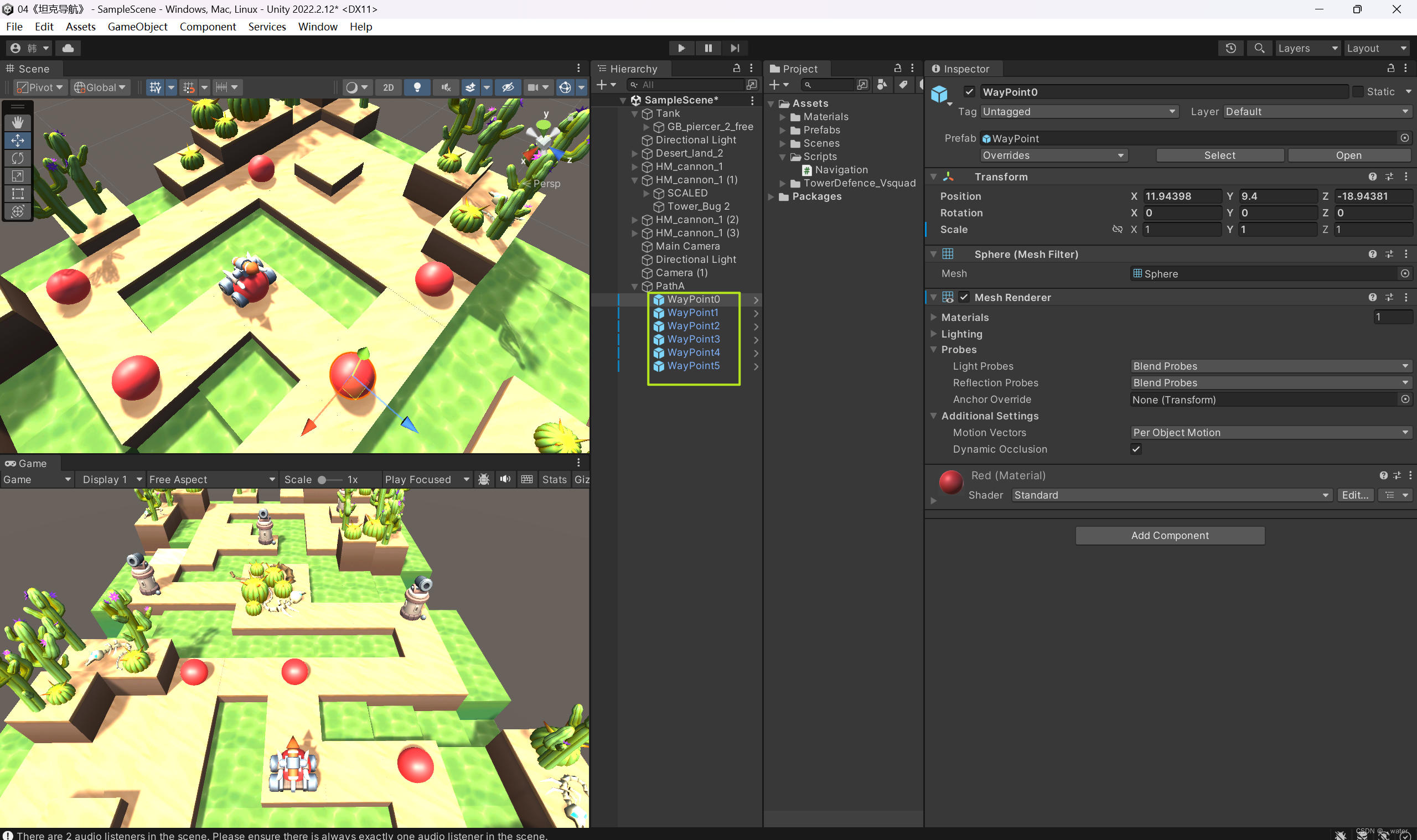
最后关闭路径点的渲染,
运行即按照规定路径导航,
End.















 2852
2852











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









