







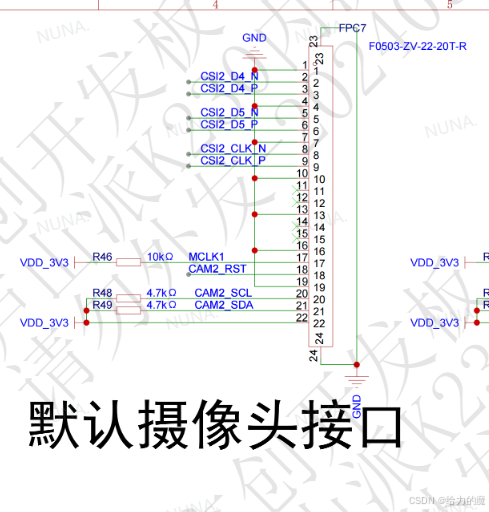
K230开发板配备了一颗OV5647 500万像素高清摄像头模组,这款摄像头以其出色的图像质量和灵活的接口选项,为开发者提供了丰富的视觉识别和图像处理功能。OV5647传感器支持多种分辨率设置,最高可达2592x1944像素,适用于从简单图像捕捉到复杂的机器视觉应用。
该摄像头通过MIPI-CSI接口与开发板相连,确保了高速的数据传输速率,这对于实时视频处理尤为重要。此外,K230开发板背面还预留了另外两个摄像头输入接口,这意味着开发者可以通过外接更多的摄像头来实现多视角或多目标的图像采集和处理。
OV5647摄像头模组不仅具备高分辨率的特点,同时还支持自动曝光控制(AEC)、自动白平衡(AWB)、自动增益控制(AGC)等功能,使得即使在变化的光照条件下也能获得稳定的图像质量。这对于诸如安防监控、智能交通系统、人脸识别等领域是非常有利的。
结合K230开发板内置的强大AI处理能力,这一摄像头解决方案为各种基于视觉的应用提供了坚实的基础。无论是开发智能家居设备、工业自动化控制系统,还是进行学术研究和教学实验,K230开发板及其摄像头都能提供可靠的支持,助力用户快速实现创意和想法。
摄像头显示实验
初始化函数
initialize_sensor()
def initialize_sensor():
sensor = Sensor()
sensor.reset()
sensor.set_framesize(Sensor.FHD)
sensor.set_pixformat(Sensor.RGB565)
return sensor-
创建一个
Sensor对象。 -
调用
reset()方法初始化传感器。 -
设置帧大小为全高清(FHD)分辨率。
-
设置像素格式为
RGB565,这是一种常用的色彩格式,适用于彩色图像处理。
initialize_display(sensor)
def initialize_display(sensor):
Display.init(Display.VIRT, sensor.width(), sensor.height())-
初始化显示屏,并设置显示模式为虚拟模式,分辨率与传感器相同。
主循环
main_loop(sensor)
def main_loop(sensor):
clock = time.clock()
while True:
os.exitpoint() # 检测IDE中断
clock.tick()
img = sensor.snapshot() # 拍摄一张图
Display.show_image(img) # 显示图片
print(clock.fps()) # 打印FPS-
使用一个无限循环来不断获取传感器的图像并显示。
-
使用
os.exitpoint()来检查是否有IDE中断请求。 -
使用
clock.tick()来记录时间,以便计算帧率。 -
调用
sensor.snapshot()来获取一帧图像。 -
调用
Display.show_image(img)来显示图像。 -
打印当前的帧率(FPS)。
清理函数
cleanup(sensor)
def cleanup(sensor):
if isinstance(sensor, Sensor):
sensor.stop()
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
MediaManager.deinit()-
如果
sensor对象是一个有效的Sensor实例,则停止传感器。 -
关闭显示屏。
-
允许系统进入睡眠模式,并短暂延迟。
-
释放媒体资源管理器的资源。
主入口
if __name__ == "__main__":
try:
sensor = initialize_sensor()
initialize_display(sensor)
initialize_media_manager()
sensor.run() # 启动sensor
main_loop(sensor)
except KeyboardInterrupt as e:
print("User stop:", e)
except BaseException as e:
print(f"Exception: {e}")
finally:
cleanup(sensor)-
在
main模块中执行程序。 -
尝试初始化传感器、显示屏和媒体管理器,并启动传感器。
-
进入主循环,处理图像。
-
处理用户中断和其他异常。
-
最终执行清理函数,确保所有打开的资源都被正确关闭。
注意事项
-
性能:在实际应用中,如果发现帧率过低,可以考虑降低图像分辨率或优化图像处理算法。
-
异常处理:异常处理确保了程序在出现意外情况时能够优雅地退出,并且释放所有占用的资源。
-
日志记录:可以在适当的地方添加日志记录,以便在出现问题时更容易调试。
-
扩展性:这种模块化的编程风格使得在未来添加新的功能或更改现有功能变得更加容易。
代码总览
import time
import os
from media.sensor import Sensor
from media.display import Display
from media.media import MediaManager
def initialize_sensor():
sensor = Sensor()
sensor.reset()
sensor.set_framesize(Sensor.FHD)
sensor.set_pixformat(Sensor.RGB565)
return sensor
def initialize_display(sensor):
Display.init(Display.VIRT, sensor.width(), sensor.height())
def initialize_media_manager():
MediaManager.init()
def main_loop(sensor):
clock = time.clock()
while True:
os.exitpoint() # 检测IDE中断
clock.tick()
img = sensor.snapshot() # 拍摄一张图
Display.show_image(img) # 显示图片
print(clock.fps()) # 打印FPS
def cleanup(sensor):
if isinstance(sensor, Sensor):
sensor.stop()
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
MediaManager.deinit()
if __name__ == "__main__":
try:
sensor = initialize_sensor()
initialize_display(sensor)
initialize_media_manager()
sensor.run() # 启动sensor
main_loop(sensor)
except KeyboardInterrupt as e:
print("User stop:", e)
except BaseException as e:
print(f"Exception: {e}")
finally:
cleanup(sensor)
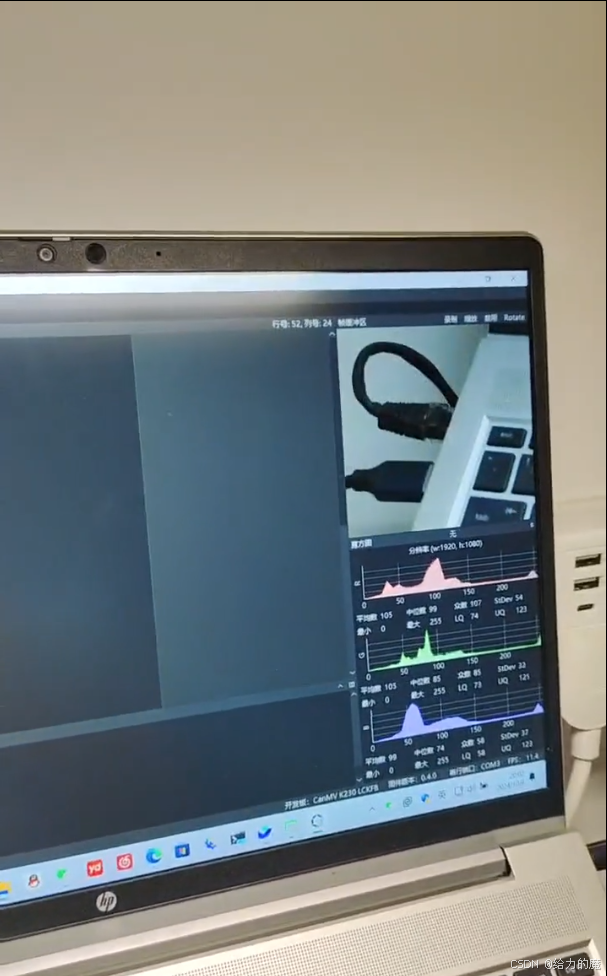
运行此代码,我们可以在右上角看到我们摄像头图像
在下方的串行终端中我们可以看到帧率的显示

















 1323
1323

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









