







Python多线程连接相机+实时循环识别读取条码
前言
本文主要讲述了python连接海康威视工业相机的操作,在简易连接相机的基础上,实现多线程运作,防止画面卡顿丢包问题的发生,优化了条码的读取与识别
一、什么是多线程?
线程是CPU分配资源的基本单位。当一程序开始运行,这个程序就变成了一个进程,而一个进程相当于一个或者多个线程。当没有多线程编程时,一个进程相当于一个主线程;当有多线程编程时,一个进程包含多个线程(含主线程)。使用线程可以实现程序大的开发。
多个线程可以在同一个程序中运行,并且每一个线程完成不同的任务。
多线程实现后台服务程序可以同时处理多个任务,并不发生阻塞现象。
多线程的程序设计的特点就是能够提高程序执行效率和处理速度。python程序可以同时并行运行多个相对独立的线程。
二、线程的创建
1.线程创建语法
代码如下(示例):
thread.Thread(group=Nore,targt=None,args=(),kwargs={},*,daemon=None)
参数解释:
~group:必须为None,于ThreadGroup类相关,一般不使用。
~target:线程调用的对象,就是目标函数。
~name:为线程起这个名字。默认是Tread-x,x是序号,由1开始,第一个创建的线程名字就是Tread-1。
~args:为目标函数传递关键字参数,字典。
~daemon:用来设置线程是否随主线程退出而退出。
三、代码的实现
1.模块的调用
import cv2
import pyzbar.pyzbar as pyzbar
from threading import Thread
import time
global fixedpoint
2.相机的相关调试代码
先打开海康威视的MVS,查看并拿取自己相机的相关数据(拿到相机的高度与宽度)
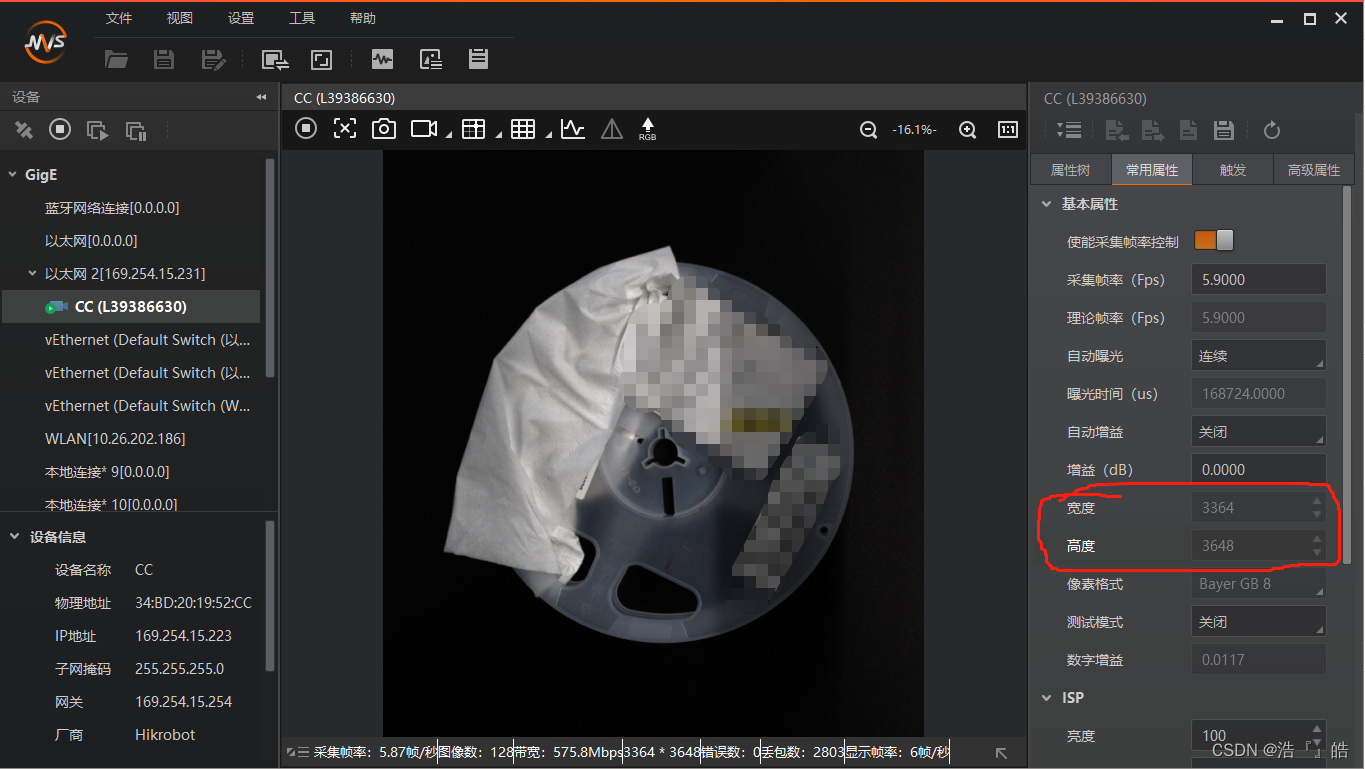
- 拿到数据后开始编写相关相机代码
cap = cv2.VideoCapture(1)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 3364) # 设置图像宽度
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 2772) # 设置图像高度
cap.set(cv2.CAP_PROP_FPS, 15) # 设置帧率
- 注意cap = cv2.VideoCapture(1)中的参数取决于你的相机位置,博主的电脑自带一个摄像头,所以参数不为0,若你的电脑不自带摄像头,请将参数改为0
3.多线程编写
def identify_code(img):
barcodes = pyzbar.decode(img)
print(barcodes)
time.sleep(2)
4.识别程序的编写
while True:
# 从摄像头读取图片
success, img = cap.read()
#多线程的调用
ewm_thread = Thread(target=identify_code, args=(img,))
ewm_thread.start()
#显示相机实时读取的图像
cv2.namedWindow("MVS", cv2.WINDOW_FREERATIO)
cv2.imshow("MVS", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 检测二维码
barcodes = pyzbar.decode(gray)
# 遍历所有检测到的二维码
for barcode in barcodes:
# 提取二维码的边界框坐标
(x, y, w, h) = barcode.rect
# 在图像中绘制二维码的边界框和文本
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2)
cv2.putText(img, barcode.data.decode('utf-8'), (x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 2)
# 输出扫描到的二维码内容
print(barcode.data.decode('utf-8'))
k = cv2.waitKey(1)
if k == 27:
# 通过esc键退出摄像
cv2.destroyAllWindows()
四、代码总览
import cv2
import pyzbar.pyzbar as pyzbar
from threading import Thread
import time
global fixedpoint
cap = cv2.VideoCapture(1)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 3364) # 设置图像宽度
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 2772) # 设置图像高度
cap.set(cv2.CAP_PROP_FPS, 15) # 设置帧率
def identify_code(img):
barcodes = pyzbar.decode(img)
print(barcodes)
time.sleep(2)
while True:
# 从摄像头读取图片
success, img = cap.read()
#多线程的调用
ewm_thread = Thread(target=identify_code, args=(img,))
ewm_thread.start()
#显示相机实时读取的图像
cv2.namedWindow("MVS", cv2.WINDOW_FREERATIO)
cv2.imshow("MVS", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 检测二维码
barcodes = pyzbar.decode(gray)
# 遍历所有检测到的二维码
for barcode in barcodes:
# 提取二维码的边界框坐标
(x, y, w, h) = barcode.rect
# 在图像中绘制二维码的边界框和文本
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 0, 255), 2)
cv2.putText(img, barcode.data.decode('utf-8'), (x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 2)
# 输出扫描到的二维码内容
print(barcode.data.decode('utf-8'))
k = cv2.waitKey(1)
if k == 27:
# 通过esc键退出摄像
cv2.destroyAllWindows()
总结
海康威视相机的连接需要花费一番功夫,该文章为博主大一时期所写,有些不足之处还望谅解,欢迎在评论区留言讨论
















 753
753











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











