







艾利特EC66协作机器人在停止状态莫名抖动,详情看如下视频
艾利特EC66协作机器人关节莫名抖动
解决办法:
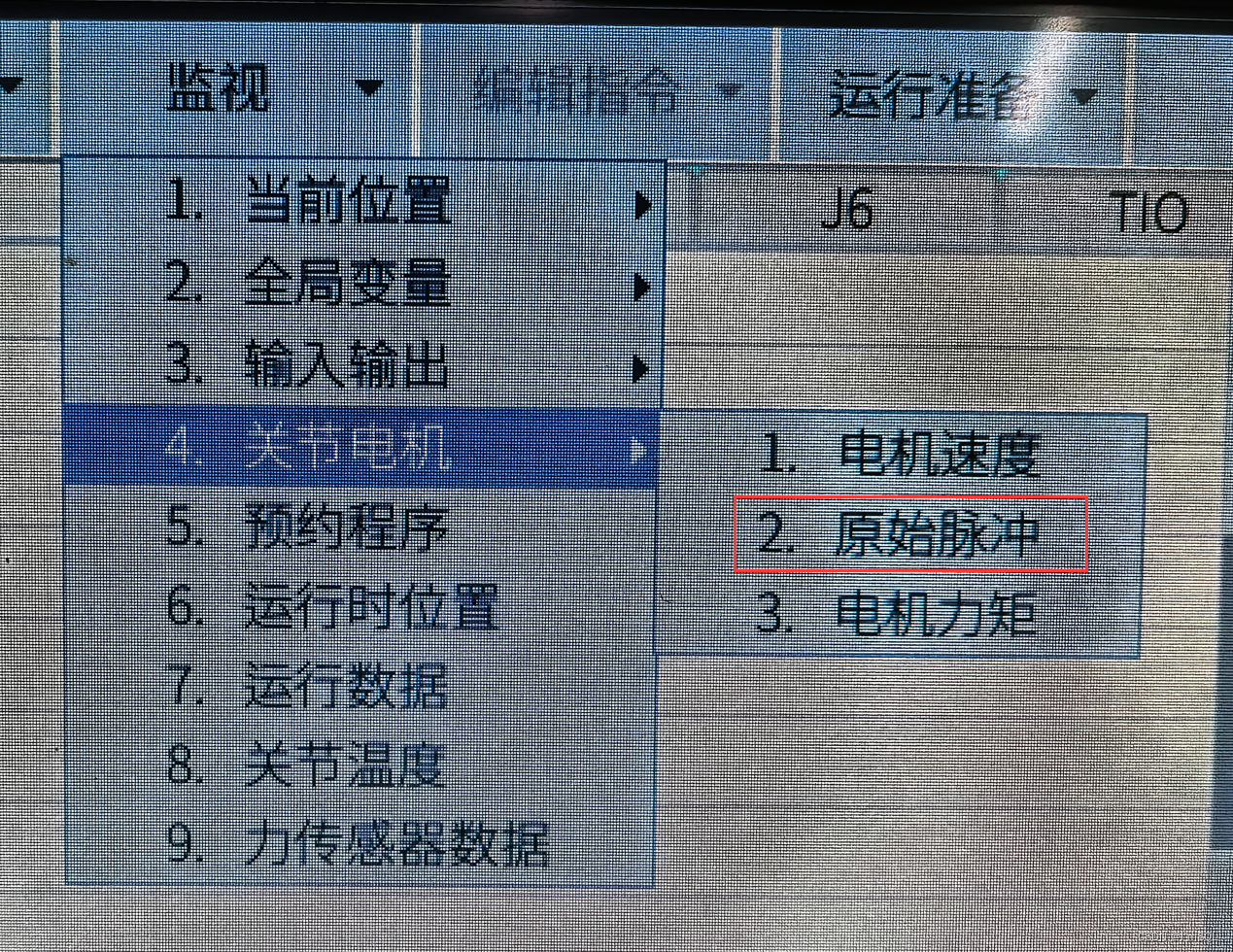
1、登录管理员获取最高权限;依次点击,监视->关节电机->原始脉冲
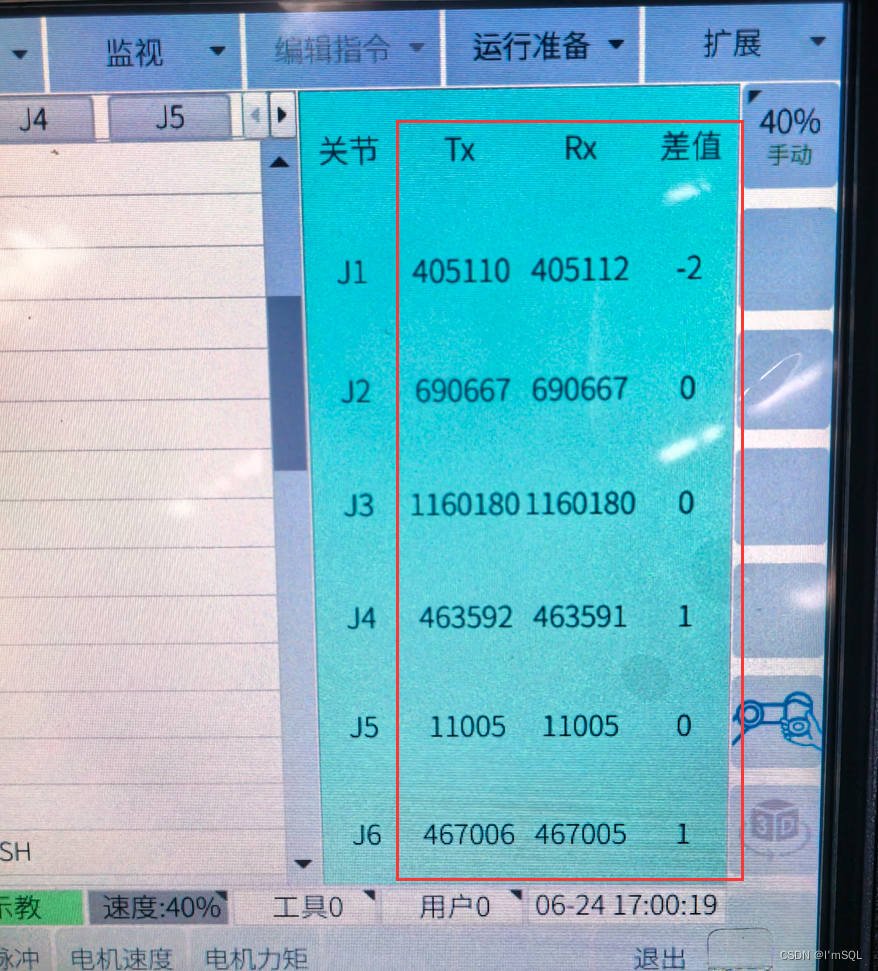
2、查看当前哪个轴的参数跳动最明显,本文现场抖动最明显的是J2和J3
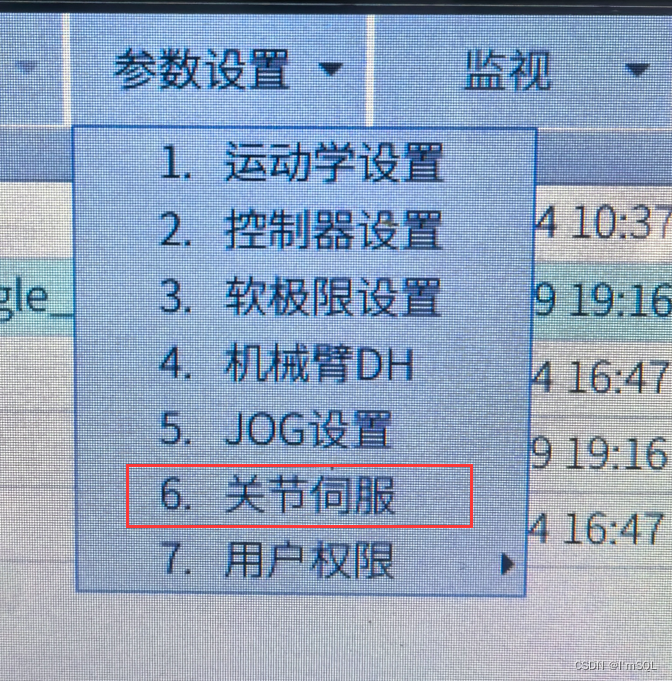
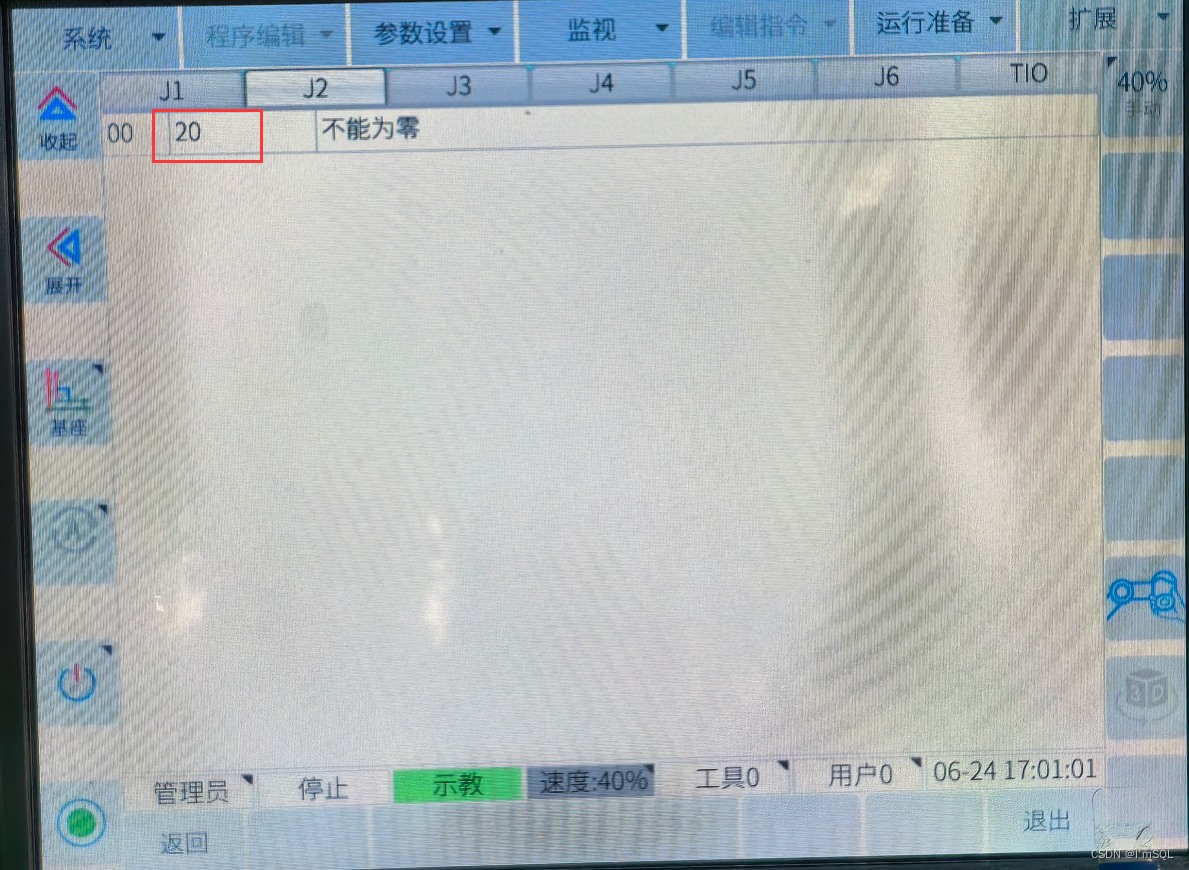
3、依次打开,参数设置->关节伺服
4、选择要修改的轴,当前选择J2,找到0024:电流环积分增益,更改值为20,然后返回
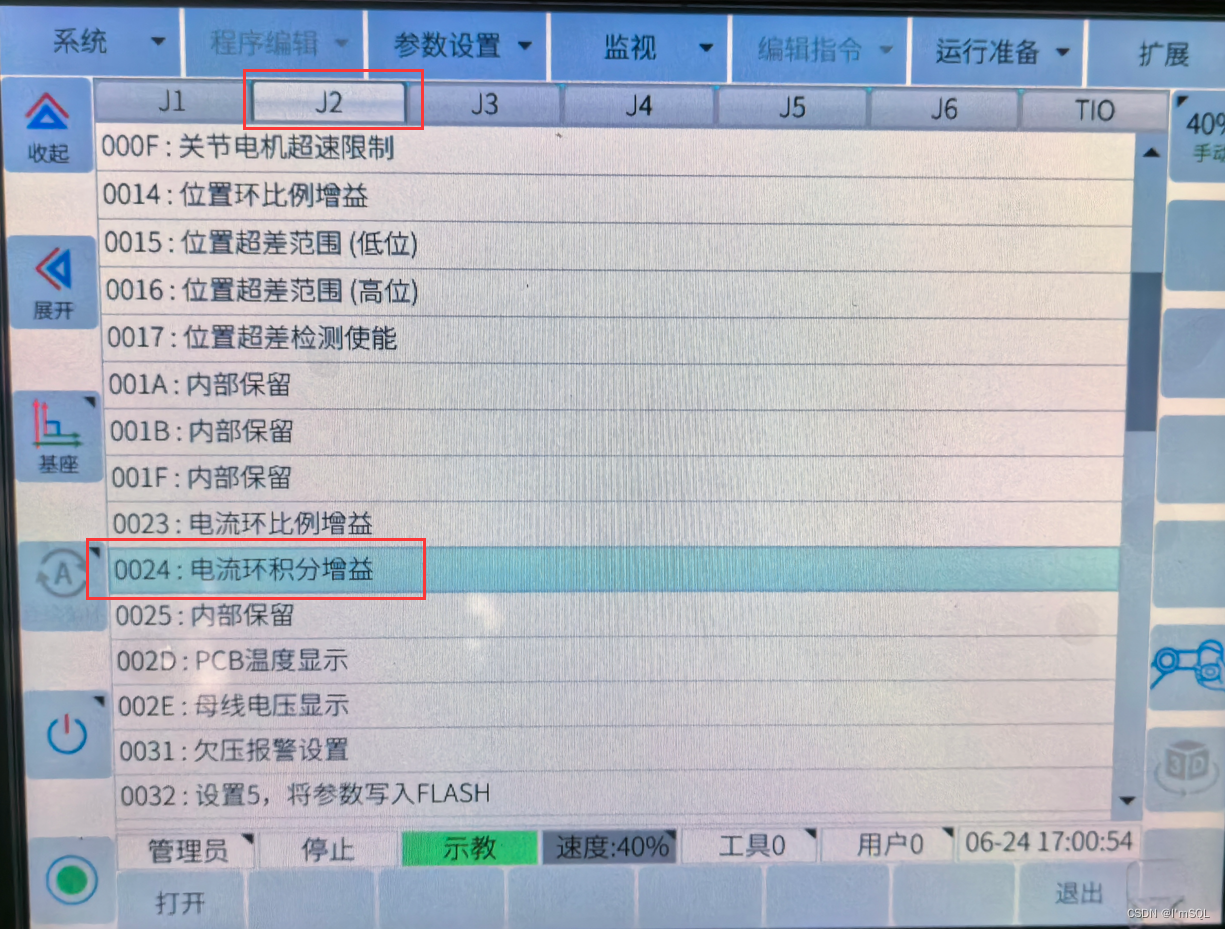
5、找到0032:设置5,将参数写入FLASH,将至更改为5


艾利特EC66协作机器人在停止状态莫名抖动,详情看如下视频
艾利特EC66协作机器人关节莫名抖动
 372
372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言

























