







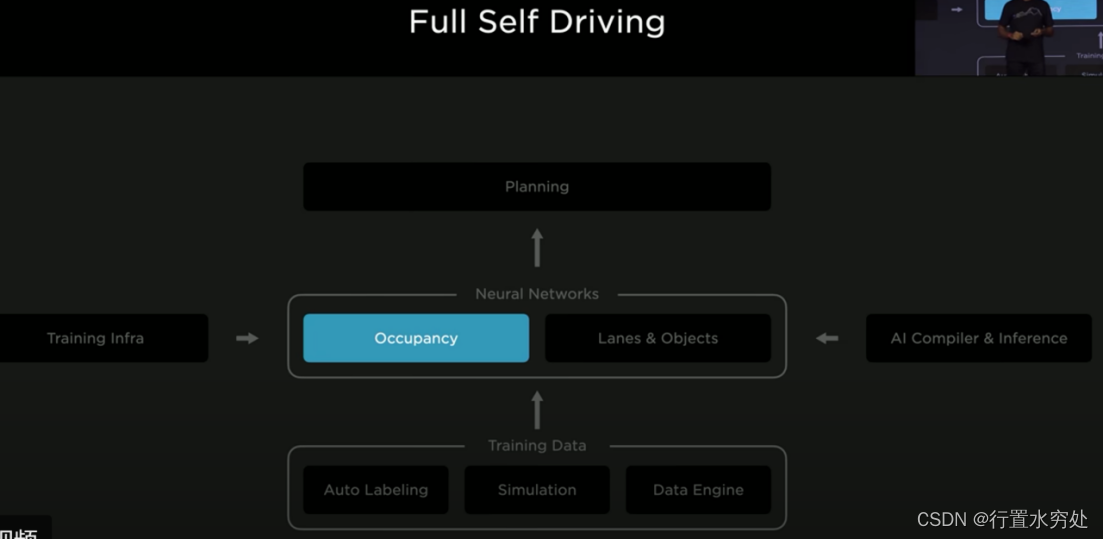
特斯拉在2022年AI Day上更新了感知规控算法模型,核心引入了Occupancy技术。下图是特斯拉活动日展示的主题内容,本文主要解读Planning和Neural Network部分。
1 规划决策
Interaction search-交互搜索
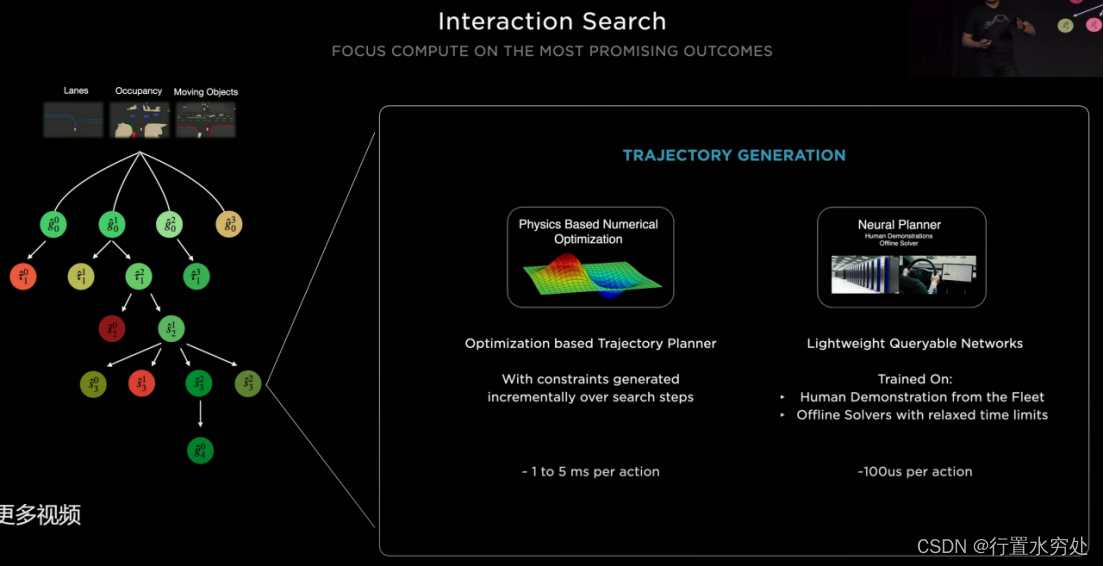 特斯拉在自动驾驶规划中使用了一种高度复杂和优化的搜索算法,结合了多种先进的技术,包括图搜索、轨迹优化和神经网络的应用。这一套方法的核心思想是系统首先基于车道和非结构化区域(如开放空间)生成多个可能的目标位置;然后使用轨迹优化技术和神经网络规划生成初始轨迹作为并行化树搜索的起点;之后通过高效的并行化树搜索(Parallelized Tree Search)来探索多种可能的路径,并结合成本函数和神经网络来优化最终的驾驶决策。
特斯拉在自动驾驶规划中使用了一种高度复杂和优化的搜索算法,结合了多种先进的技术,包括图搜索、轨迹优化和神经网络的应用。这一套方法的核心思想是系统首先基于车道和非结构化区域(如开放空间)生成多个可能的目标位置;然后使用轨迹优化技术和神经网络规划生成初始轨迹作为并行化树搜索的起点;之后通过高效的并行化树搜索(Parallelized Tree Search)来探索多种可能的路径,并结合成本函数和神经网络来优化最终的驾驶决策。
并行化树搜索(Parallelized Tree Search)
1)搜索树的构建
从初始状态(根节点)开始,每个节点代表某个时间点的车辆状态,每条边代表车辆从一个状态到另一个状态的可能路径或动作。搜索树的每一层表示时间的推进,不同的分支代表不同的路径选择。
2)路径评估和选择
依赖成本函数(Cost Function),系统使用一个综合的成本函数来评估每条路径,包含以下几个部分:
St=Stego+Stobj+SOccupancy+SLanes+STrafficControls
- Stego车辆自身状态的成本,包括速度、加速度等。,
- Stobj与其他对象的相对成本,避免碰撞和保持安全距离。
- SOccupancy考虑道路上静态和动态障碍物的成本。
- SLanes遵守车道规则和变道策略的成本。
- STrafficContro
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1847
1847

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









