






写在前面
发表于Rail. Eng. Science的Active suspension in railway vehicles: a literature survey一文,全面总结了2020年之前轨道车辆领域主动控制方案的各种重要实现。其主要作者,Bin Fu、Rocco Libero Giossi、Rickard Persson、Sebastian Stichel、Stefano Bruni、Roger Goodall均是轨道交通(特别是主动控制领域)的顶级专家。本博客是对论文原文的忠实翻译。
由于论文较长,原文有33页,因此将其拆分为若干篇博客,分别进行翻译和注释。
版权声明
原文为发表于SpringerNature的开放获取Open access (OA) 论文,满足CC BY(知识共享署名)版权要求。CC BY许可证允许他人分发、修改、改编,甚至出于商业目的,只需要注释原始作者并署名。CC BY许可证并不限制作品的语言版本。因此,将一篇在CC BY许可证下发布的英文论文翻译为中文本身并不违反许可证要求。
论文翻译
Active suspension in railway vehicles: a literature survey
摘要
自从主动悬挂的概念出现以来,其巨大的潜在好处吸引了铁路工程领域的持续探索。随着对铁路车辆更高速度、更好的乘坐舒适性和更低的维护成本的新要求,主动悬挂成为非常有前景的技术。作为主动悬挂在轨道车辆商业应用的起点,摆式列车在一些国家取得了巨大成功。随着传感器和执行器技术成熟度的提高,主动悬挂迎来了前所未有的发展。在这项工作中,我们总结了过去十年出现的基本概念、新理论和解决方案。同样描述了实验研究和不同主动悬挂技术的实施现状。首先,简要描述了摆式列车。之后,对主动二系悬挂和一系悬挂进行了深入研究。对于这两个主题,介绍了文献中现有的可能解决方案后,报告了实施现状。主动二系悬挂被分类为主动和半主动悬挂。一系悬挂则分为作用于刚性轮对和独立旋转车轮。最后,从优势、研究现状和挑战的角度,简要总结并展望了未来趋势。概述了主动悬挂在铁路应用中的潜力。
关键词
主动悬挂、铁路车辆、机电一体化、控制、主动一系悬挂、主动二系悬挂
1 引言
在过去的半个世纪里,铁路车辆的发展趋势是应用越来越多的电气设备、传感器和控制器,与传统的机械结构相结合,以满足更高速度、更好的乘坐质量和更严格的安全要求的新需求。在列车运营、通信、牵引和制动系统等子系统中,已经开发并投入实际使用了许多数字技术。相比之下,只有有限的主动控制解决方案被引入以改善铁路车辆的动力学。摆式列车作为成功应用之一,显示出巨大的好处,促进了过去二十年对主动悬挂的进一步探索。
由于铁路车辆的悬挂系统是一个旨在实现不同功能的复杂系统,因此开发了具有不同功能和配置的主动悬挂技术。主要的综述发表于1983年、1997年、2003年和2007年[1-4]。然而,在过去的十年里,出现了许多新理论和实现。因此,在这项工作中,我们呈现了一个全面和系统的最新综述,包括最近对主动悬挂的研究。在第2节中,解释了一般概念,并引入了主动悬挂的分类。基于这一分类,介绍了不同的作动器方案。由于摆式列车可以被视为一项相当成熟的技术,且自2009年以来几乎没有发展[5],因此仅在第3节中简要介绍。重点放在第4节和第5节分别描述的主动二系和一系悬挂上。最后,第6节提供了一个总结和对未来趋势和研究需求的展望。
2 主动悬挂的基本概念和分类
2.1 主动悬挂的基本概念
对于被动悬挂,固定的刚度和阻尼参数定义了系统的动态响应。车辆悬挂系统的外部激励包括确定性(轨道布局)和随机性(轨道不平顺)激励在不同频率范围内。因此,固定参数的被动悬挂设计必须找到不同工况下的折中解决方案。相比之下,通过实施主动悬挂可以实现'全局最优解决方案',提供可变悬挂参数功能结合了传感器、控制器和执行器的综合利用。 图1总结了主动悬挂的通用工作流程。
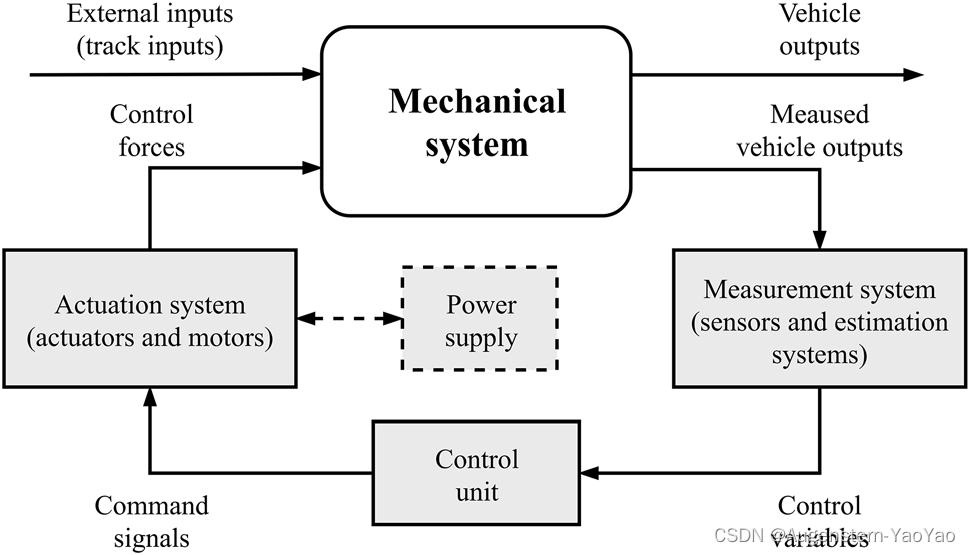
图1 主动悬挂的工作流程
在该流程中,测量系统将直接或间接地从传感器和滤波器中收集包括加速度、速度和位移在内的车辆信息。其他信息,如车辆位置和轨道布局,可以从地理系统和线路数据库中获取。这些信息将在预先设计的控制单元中进行分析,以达到特定目标。然后,命令将被发送到一个执行系统,以产生所需的力量,最终改善铁路车辆的动态性能。
2.2 主动悬挂的分类
2.2.1 基于悬挂位置的分类
对各种主动悬挂技术进行分类的方法有很多种。一种自然的方法是根据它们的位置将技术分为两类:
a. 主动一系悬挂
b. 主动二系悬挂
主动一系悬挂旨在改善刚性轮对(SW)或独立旋转车轮(IRW)的稳定性、导向和曲线通过行为。主动二系悬挂旨在提高乘坐舒适性和控制车体的准静态运动,例如使用Hold-Off-Device(HOD)。摆式列车通过在曲线中倾斜车体至需要的侧滚角,以减少乘客感知到的横向加速度,从而允许更高的曲线通过速度。从理论上讲,摆式列车属于主动二系悬挂,并且可以集成其他主动方案,如HOD,但作为一种独特且发展成熟的技术,将其从主动二系悬挂中分离出来,并在第3节中单独介绍是合理的。
2.2.2 基于控制程度的分类
从控制程度的角度看,可以将半主动和全主动控制分为两类。两者之间的明显区别如图2所示。全主动控制需要电源来产生所需的力,从而可以控制机械结构的运动。相比之下,半主动悬挂中没有电源供应或执行器系统,可控变量是被动悬挂的参数:可变刚度弹簧[6]、可变惯容器[7]和可变阻尼器[8]。大多数研究都集中在这三者中最后的可变阻尼器上。在半主动悬挂中,由于产生的阻尼力仍然依赖于阻尼器的速度,车辆动力学的改善自然受到限制。例如,半主动控制无法为低频振动或准静态条件下创造所需的力。然而,半主动阻尼器的简单性使得其更容易实现,因此可以作为被动悬挂和全主动悬挂之间的折中方案。
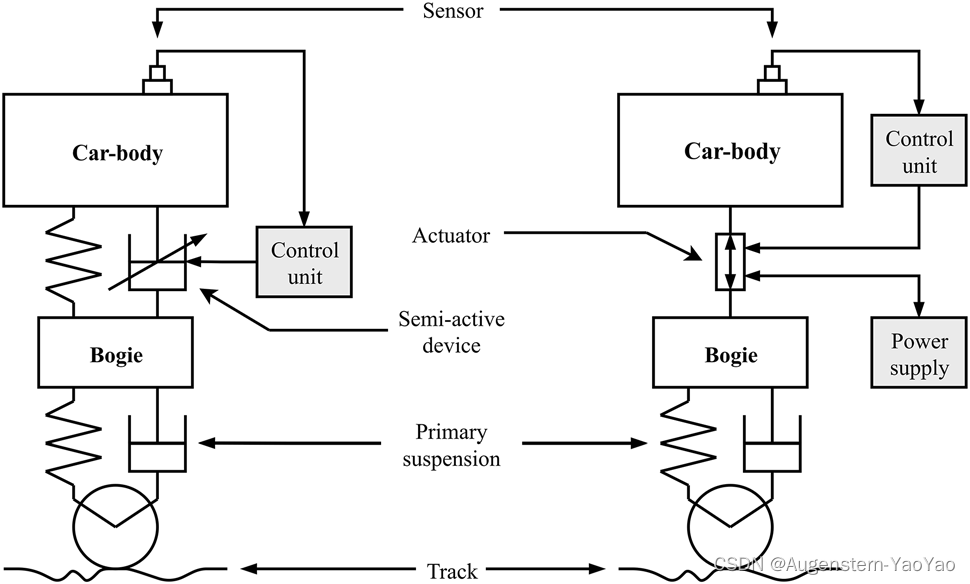
图 2 半主动(左)和全主动(右)悬挂原理示意图
2.2.3 基于功能的分类
另一种主动悬挂的分类是基于主动控制的目的[1]。分为以下四种类型:
a. 车体与轨道不平顺的隔离(即乘坐舒适性)
b. 控制转向架的动力学模态(即稳定性)
c. 轮对的导向(即主动导向)
d. 除被动悬挂外的特殊功能(即摆式列车,HOD)
由于主动悬挂的目的决定了控制目标和感兴趣的频率范围,因此包括控制器、传感器和执行器在内的主动控制方案将相应地有所不同。因此,这种分类有助于控制策略和其他部分的描述。在这项最新综述工作中,将这种分类的思想应用于每个小节内。例如,当涉及主动一系悬挂系统时,基于“导向性能”和“稳定性”功能分别介绍控制策略。
3 摆式列车
摆式列车的车体倾斜是铁路车辆中一项成熟的技术。其目的是通过在曲线通过过程中侧摆车体,减少乘客感知到的横向加速度。这种解决方案提升了乘用舒适性,最终允许在曲线中以更高的速度行驶,从而减少整体的旅行时间。根据Persson等人[5]的报告,与相同最高速度的非摆式列车相比,摆式列车的运行时间效益可高达10%。
最早的摆式机制尝试于20世纪30年代末引入[9],而第一辆运行的摆式车厢则由Atchison、Topeka和Santa Fe Railway在1938年开发[10]。在1980年代,西班牙引入了自然倾摆列车,即Talgo Pendular列车[11]。第一批大规模生产的主动摆式列车于1981年在加拿大引入,为LRC列车,随后意大利于1990年代引入ETR450列车,瑞典引入X2000列车,而第一列高速列车于2007年在日本引入,为新干线N700系列[5, 12]。
根据倾摆原理,摆式列车可分为(1)自然倾摆和(2)主动倾摆。在自然倾摆中,车体的摆动是由作用在车体本身的离心力获得的。只有当车体重心位于倾斜中心下方时,自然倾摆才具有实现的可能。在图3的左侧,显示了这种机制。
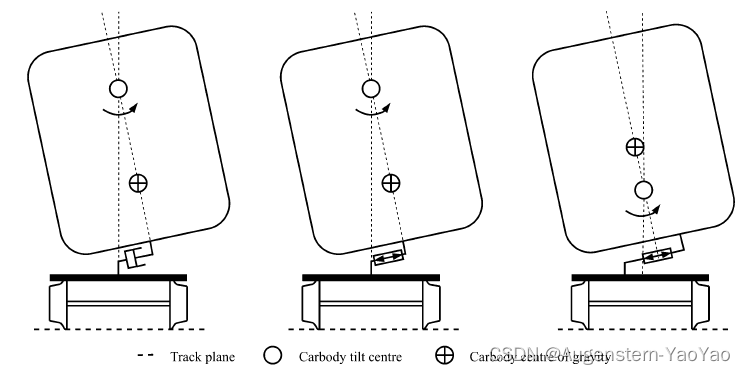
图 3 自然倾摆(左)、受控自然倾摆(中)和主动倾摆(右)
自然倾摆的一个商业成功案例是Talgo列车[13],其中通过将空气弹簧放置在较高位置,从而改变了倾斜中心,实现了自然倾摆。自然倾摆是一种安全可靠和低成本的机械系统[5],但它会使车体重心的位置向侧向移动,从而增加了侧翻的风险。此外,车体的惯性力将延迟过渡曲线中的倾摆运动,增加了敏感乘客的晕动病风险。因此,通常会应用受控的自然倾摆(图3中心)。在此,引入了一个执行器,以减少过渡曲线中侧向加速度的波动。此外,它还用于在曲线通过之前启动倾摆运动,以减少倾摆运动的延迟并降低晕动病的风险。对于主动倾摆(图3右侧),由于运动是由专门的执行机构提供的,重心不必低于倾摆中心,但通常安排在故障情况下使车体返回直立位置。根据Persson等人[5]的报告,摆式列车的倾摆控制从所谓的零位控制器(nulling controller)发展到领先参考控制策略(precedence control strategy)。这些控制策略如图4所示。
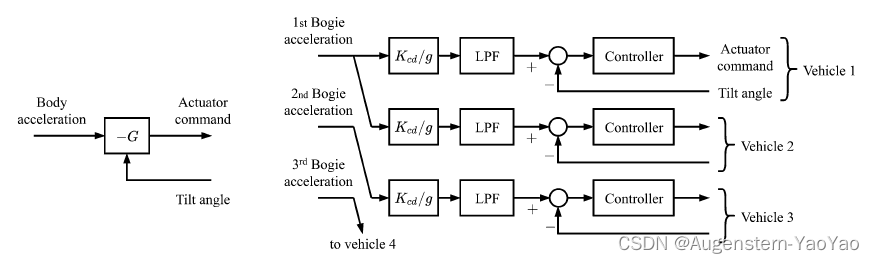
图 4 倾斜控制:零位控制(左)、优先控制(右)
在车辆本地测量(local vehicle measurements)领域,Zamzuri等人[14]展示了一个具有模糊校正方案的比例-积分-微分(PID)零位型控制的有前途的应用。在这项研究中,所提出的控制器与传统PI控制器的模糊扩展进行了比较,显示出了改善的性能。 关于零位型控制,Hassan等人[15, 16]使用优化程序来增强PID方法的性能,同时保持控制器所需的鲁棒性。随后,Zhou等人[17]提出了一种倾摆和主动二系悬挂横向控制的组合。他们使用了一种去中心化方法,基于侧向加速度、执行器侧滚角和悬挂横向偏移量(lateral acceleration, actuator roll and suspension deflection)的测量来分别控制侧滚和横向动力学。然而,如前所述,车辆上测量的反馈信号可能在控制应用中引入问题。为了解决这个问题,Zhou等人[18]引入了基于H∞滤波的鲁棒状态估计,以估计车体侧向加速度和真实的超高不足。然后将H∞滤波与标准卡尔曼滤波器进行了比较,显示了良好的结果。
Facchinetti等人[19, 20]采用了与Zhou在[17]中类似的方法,结合摆式和主动横向控制,研究了使用主动的空气弹簧和二系空气悬挂的可能性。引入了前馈和反馈的组合,并在一个由一个转向架和一个配重质量组成的全尺寸测试台架上测试了其有效性,该配重质量模拟了半个车体的惯性。Colombo等人[21]也使用了前馈和反馈组合的相似方法,来控制互连液压执行器(interconnected hydraulic actuators)。互连液压执行器的目的是驱动车身摆动,并提供与传统抗侧滚扭杆相同的车身至转向架之间的刚度。测试了三种不同的控制方法,显示前馈、PID和天棚控制的组合可以在可接受的执行功率要求下提供最佳的乘坐舒适性。Jacazio等人[22]研究了一种替代方法。他们开发了一种自适应PID控制,目的是在保持所需动态性能的同时最小化液压执行器的功率损耗。这种适应是基于外部温度和执行器作动力。基于真实轨道数据的仿真结果显示,节省了列车辅助系统所需电力的10%至20%。尽管上述某些参考资料中描述了液压执行器,但由于其较高的效率,许多新的欧洲摆式列车今天使用了电动致动器(electro-mechanical actuators)[5]。
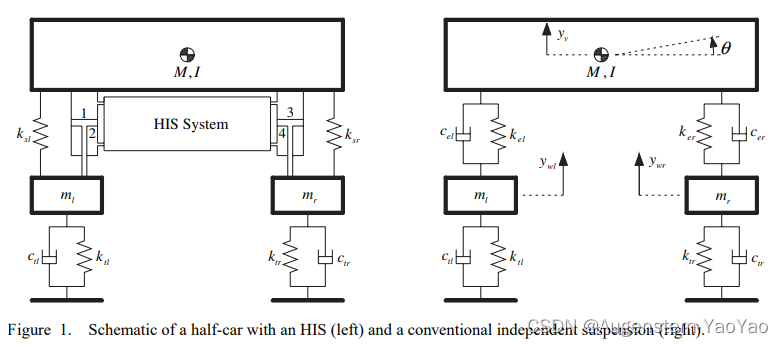
补充示意图:interconnected hydraulic actuators (HIS),原文没有此图。
提高倾摆控制的一个增强方案是利用存储的轨道数据来预测即将到来的曲线,并减少执行系统中的延迟[23]。在这里,横向加速度、侧滚和摇头角信号与轨道数据结合,计算执行器要提供的指令角度。Persson等人[24]给出了存储轨道数据的另一种用法。在这里,一个新的倾摆控制算法被用于轨道测试,以减少晕动病。该算法以存储的轨道数据和定位系统提供的车辆在轨道上的位置为输入,以选择适当的数据。这种方法在100名受试者身上进行了测试,结果在舒适性改善和晕动病减少方面都显示出了较好的结果。
4 主动二系悬挂
4.1 原理和配置
铁路车辆中的二系悬挂旨在在传递车身至转向架的静态和准静态载荷时,减轻来自轨道不平顺的车辆振动,并具有限制的偏转。
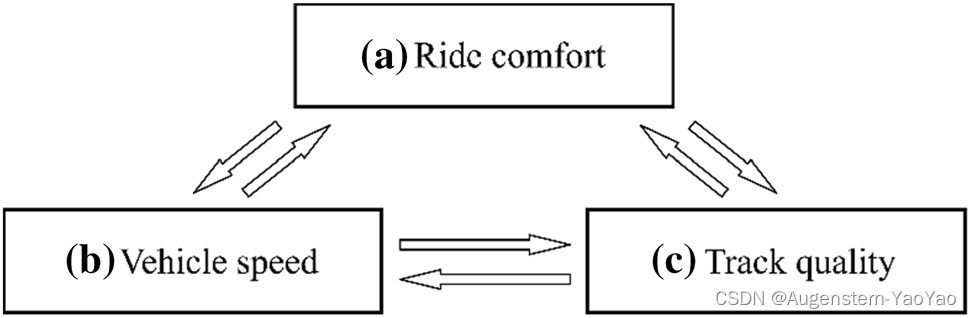
图 5 舒适性、车速与轨道质量之间的相互关系
然而,良好的振动衰减目标与小变形是相互矛盾的,限制了被动二系悬挂的性能。
译注:
良好的振动衰减(good vibrational attenuation) 指的是二系悬挂系统能够有效减少来自轨道不平顺的振动传递到车体,从而提高乘坐舒适性。小变形(small deflections) 指的是悬挂系统在承受载荷时变形幅度小,这通常意味着悬挂系统较为硬,有助于保持车辆的稳定性和操控性。这两个目标是相互矛盾的,因为:a.为了获得良好的振动衰减,悬挂系统需要更大的柔性以吸收冲击和振动,这通常会导致较大的悬挂变形。b.而为了维持小的悬挂偏转,提高车辆稳定性和操控性,悬挂系统需要设计得更加刚硬,这可能会降低其对振动的衰减能力。在被动悬挂系统中,很难同时达到这两个目标,因为增加悬挂的柔性以改善振动响应会导致更大的悬挂变形,这可能不利于车辆的动态响应。而主动悬挂系统可以通过调节其刚度和阻尼特性,实时适应轨道情况的变化,同时提供良好的振动控制和维持较小的偏转,从而达到上述两个目标。
主动二系悬挂可以被设计用来同时满足这两个目标。下面根据图5中显示的相互关系,总结了关于乘坐舒适性、车辆速度和轨道质量的三个适用概念:
a. 在当前速度和轨道条件下提高乘客乘坐舒适性
b. 在保持乘坐舒适性和不增加对轨道质量的需求的情况下,提高速度
c. 在不影响乘坐舒适性和速度的情况下,允许较低的轨道质量
大多数配有被动悬挂的铁路车辆的乘坐质量今天已经令人满意,这意味着第一个适用概念不那么吸引人,而其他两个概念仍然使其实施值得。对于主动二系悬挂的配置,执行器通常放置在转向架和车身之间的横向或垂直方向。被动气弹簧也可以被改造成执行器,以控制低频范围内的振动[20]。
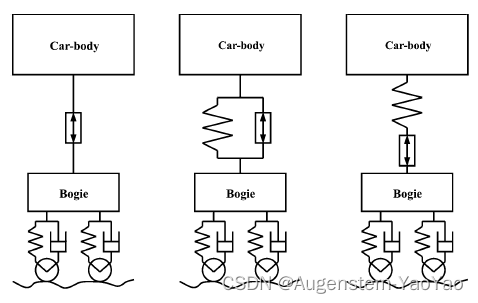
图 6 主动二级悬挂的机械配置
主动二系悬挂可以在与被动弹簧相关的不同机械配置中引入,如图6所示。执行器可以直接替换转向架至车身的原来的被动弹簧,并独立控制车辆的运动。然而,考虑到不同执行器的动态特性,将执行器以并联或串联的方式与被动弹簧结合实现更为实用。当与执行器并联时,被动弹簧可以承担垂直和横向的静态和准静态载荷,从而减少了对执行器的要求,并使执行器的尺寸变小。当与执行器串联时,被动弹簧可以隔离执行系统难以快速响应的高频激励,因为执行器在高频范围内可能无效。在实际应用中,可以使用串联和并联弹簧的组合。
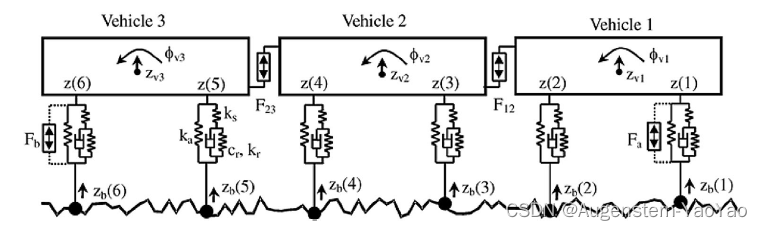
图 7 车辆间作用系统配置 [25]
Mei等人[25]提出了一种特殊配置的主动二系悬挂,即在列车组中相邻车身之间实施执行器,如图7所示。在这种配置中,可以减少执行器的数量。由于振动已被被动悬挂衰减,工作环境对传感器和执行器来说是友好的。这导致了执行系统的更高可靠性。Zhou在横向方向应用了类似的配置[26]。
忽略纵向列车动力学,剩余的五种刚性车身运动(横移、垂直运动和三个方向上的旋转运动)可以通过垂直和横向主动悬挂的组合来控制。横向运动和摇头运动单独或一起可以通过主动横向悬挂来控制,而主动垂直悬挂旨在减轻跳动和俯仰(点头)振动。侧滚控制可以通过横向或垂直主动控制实现,这是摆式列车的主要目标。通常会考虑在一个综合控制方案中考虑不同的运动,这也被称为模态分解控制(modal separation control)。这将在4.2.1节中详细介绍。 旨在改善乘坐舒适性的主动系统通常安装在二系悬挂中,但也有在一系悬挂中提出主动控制以减轻车身振动的例子。近期的研究表明,半主动垂直一系悬挂有潜力减少车身第一弯曲模态振动[27]。尽管这从技术上属于主动一系悬挂,但控制策略和实施状态分别在4.2.13节和4.3.3节中描述,因为这种应用的最终范围是提高乘坐舒适性。
4.2 二系悬挂主动控制策略
4.2.1 高带宽完全主动控制
高带宽控制处理来自轨道不平顺的随机振动,以改善乘客的乘坐舒适性。在介绍控制策略之前,值得一提的是评估乘坐舒适性的不同方法。通常使用EN 12299 [28]规定的方法,或者Ride Index WZ [29],考虑了车身地板上频率加权加速度的RMS值。加权函数用于反映人对乘坐舒适性的感受。人体在0.5至10 Hz之间最敏感。加权函数根据方法和方向而有所不同。
刚性车身模式通常在1 Hz左右的频率范围内,而与乘坐舒适性相关的涉及车身的形变模态在8至15 Hz之间。转向架刚性模态通常在5至10 Hz范围内。因此,正确设计二系悬挂系统以避免由于不同共振频率之间分离不良而导致的乘坐质量达到不可接受的水平是非常重要的。此外,铁路车辆更高速度的普遍要求使用更轻的车身,导致结构刚度降低,最终导致自然频率降低。这种效应倾向于恶化乘坐舒适性。一旦被动系统得到优化,改善乘客舒适性的一种好方法是使用主动(或半主动)悬挂系统来抑制来自轨道的不希望的振动。
文献中使用了不同的控制方法,如模态控制、LQG和H∞,但这些概念可能不会独立采用。因此,在图8中,它们之间的关系被组织在子结构中。其他概念存在,但在这里不予考虑。一个主要区别可以在基于模型和非基于模型的控制器之间找到。包括H∞和LQG的基于模型控制可以产生更好的性能,但同时它们可能受到未建模行为和参数不确定性的影响。图8中的虚线表示可以使用基于模型的方法,但设计天棚控制器或模糊控制器并不是必需的。第二个区别可以在模态分离方法的应用中找到。这种方法称为模态控制(modal control),接下来将进行解释。在接下来的部分中,将介绍六个类别及其在高带宽中的完全主动控制中的应用。控制概念如下:(a)模态控制 (b)天钩阻尼控制 (c)线性二次高斯(LQG)控制 (d)H∞控制 (e)模糊控制。将单独提到(f)车间执行器控制。
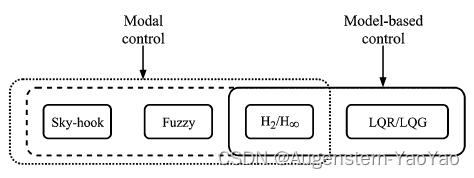
图 8 控制方法
(a) 模态控制
为了帮助理解模态控制的概念,首先引入所谓的局部控制(local control),如图9所示。在这种方法中,不直接考虑全局系统。系统的好处来自单独的局部化行动。在这种方法中,每个传感器-控制器-执行器三元组创建了一个没有与其他直接通信的单独子系统。
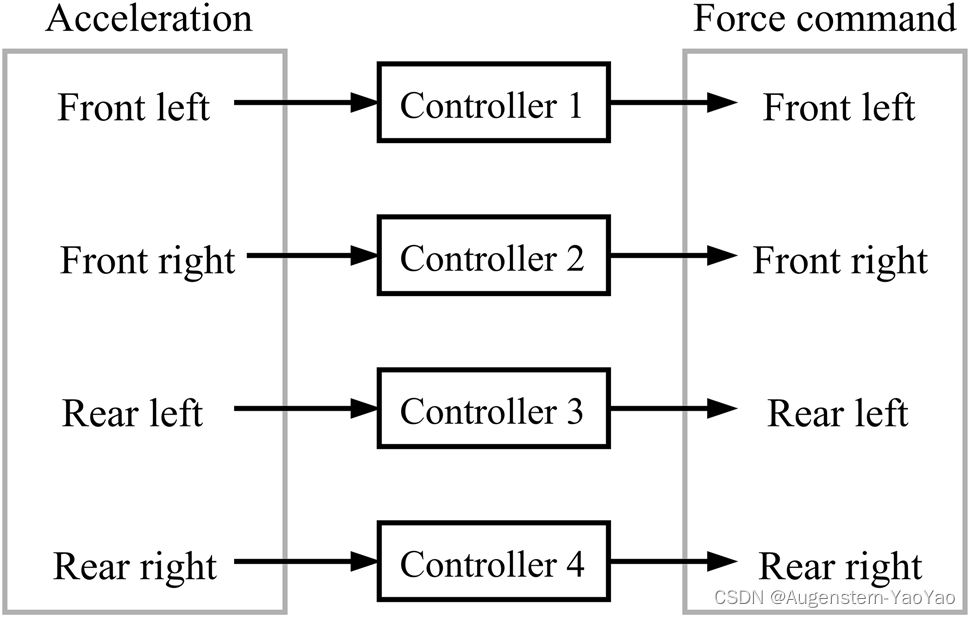
图 9 局部控制示例
相反,模态控制的目标是使用一个共同的控制策略有效地衰减不同的运动。通过处理车身不同位置测量的加速度,实现模态分解。然后,为了抑制每个单一模式,将单独计算所需的作用力,并且这些力将被叠加,以便最终同时阻尼不同的振动模式。图10给出了一个模态控制的例子,其中模态分解应用于车身的跳动、俯仰和侧滚运动。
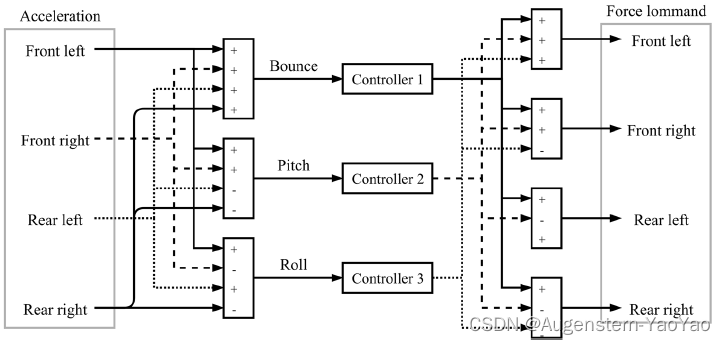
图 10 模态控制方案示例
Orvnas 将这个想法应用于设计用于横向、摇头和侧滚运动控制的控制方案[31],以及用于跳动、俯仰和侧滚运动控制的方案[32]。在[31]中提出并应用的控制方案如图11所示。在这个方案中,安装在车身前后位置的传感器将测量横向加速度。然后,处理这两个信号的和与差,分别反映横向振动和摇头运动。然后,将生成旨在控制这些运动的力,根据天棚或H∞控制。此外,转向架的横向加速度经过低通滤波,使用一半的转向架质量作为增益形成HOD功能的力参考。模态控制的思想也应用于Hammood和Mei [33]、Sugahara等人[34]、Yusof等人[35],以及Qazizadeh等人[36, 37]的研究中。
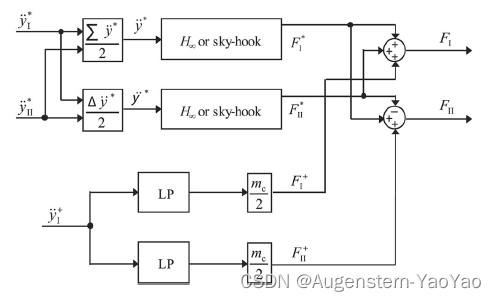
图 11 结合HOD并考虑横向和摇头运动的模态控制 [31]
(未完)
后续内容,请继续参阅博文:
















 329
329











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









