







在寻找虚拟样机的漫漫长路中,最终回归到了传统的办法——MATLAB
概念摘自百科:
SimMechanics 立足于Simulink 之上,是进行控制器和对象系统跨领域/学科的研究分析环境。SimMechanics 为多体动力机械系统及其控制系统提供了直观有效的建模分析手段,一切工作均在 Simulink 环境中完成。
中文学习资料不多,在YouTube上找到密歇根大学的Gordon Parker教授的教学视频共5集,看完之后决定开坑记录一下,顺便巩固复习。
地址:https://www.youtube.com/watch?v=iVrjuHYtr_o
====================================================================
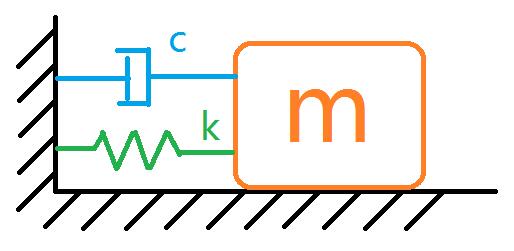
本章将做一个简单的弹簧阻尼滑块系统。
在MATLAB的command window中键入:
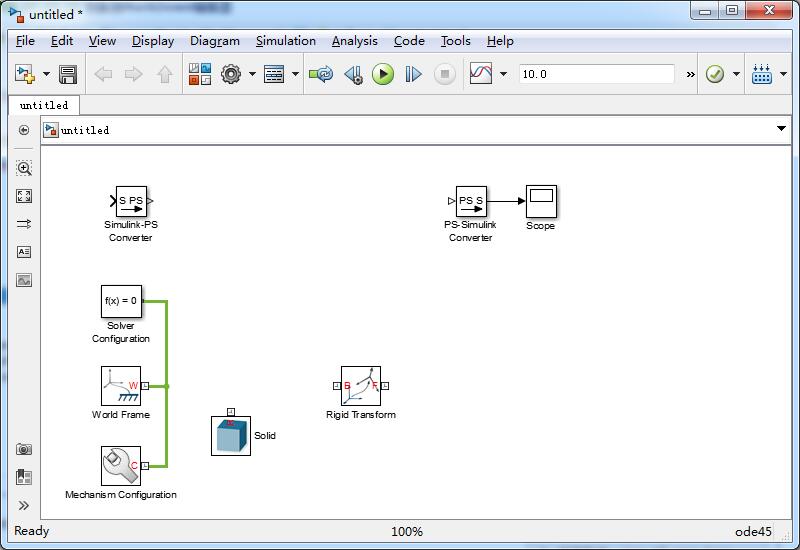
smnew
此时会弹出两个窗口,一个是simmechanics的library,一个是工作窗口。
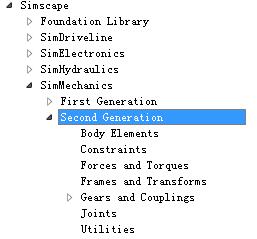
library可以再simulink中的库中找到:
simulink >> simscape >> simmechanics >> second generation
我们回到工作窗口:
插播几条simulink的操作:
左键拖动 —— 移动
右键拖动 —— 复制
中键拖动 —— 移动视图
滚轮
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 9538
9538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









