







“ 本篇文章对粒子群优化算法进行改进,首先通过引入混沌映射机制,对其群体进行初始化,增加粒子群个体的多样性;然后在粒子群个体的位置更新公式上引入改进的莱维飞行机制,提高搜索精度,帮助粒子群个体跳出局部最优。”
可以选择1-10不同的映射,1-10分别为,tent、Logistic、Cubic、chebyshev、Piecewise、sinusoidal、Sine,ICMIC, Circle,Bernoulli。选择不同的数字可以随意切换。
先上结果图,在CEC2005函数上进行测试,种群个体设置为50个,循环次数为3000次。
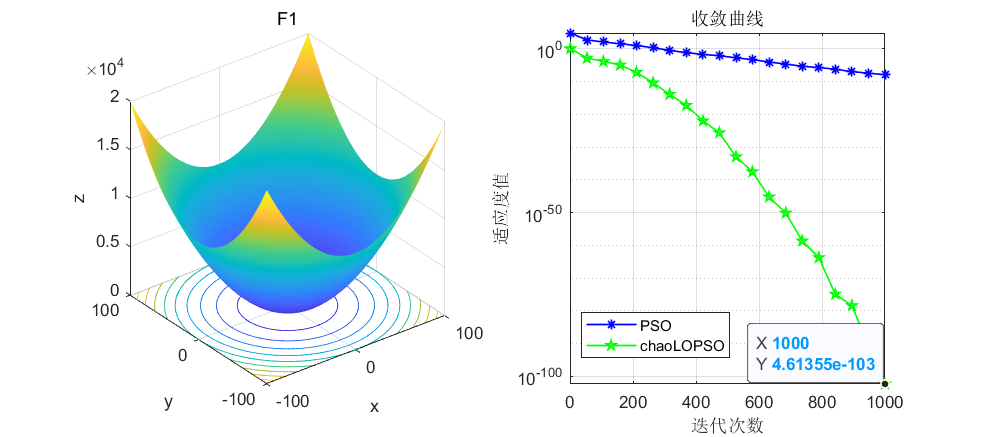
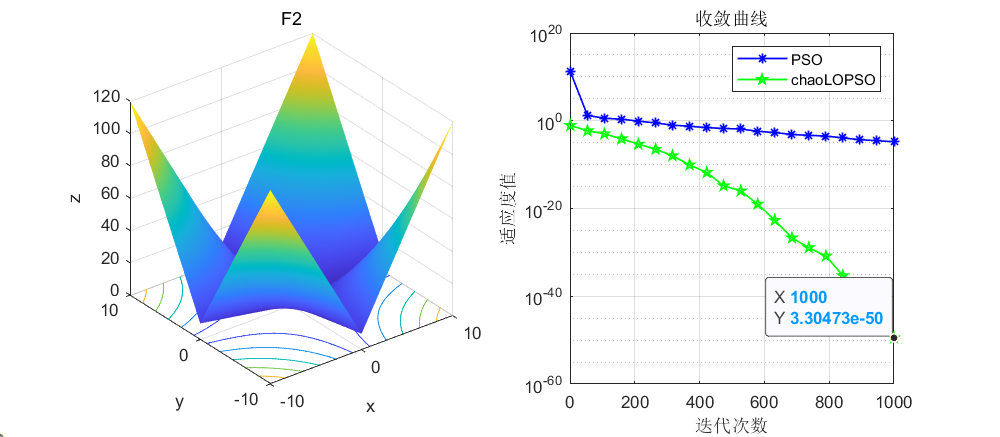
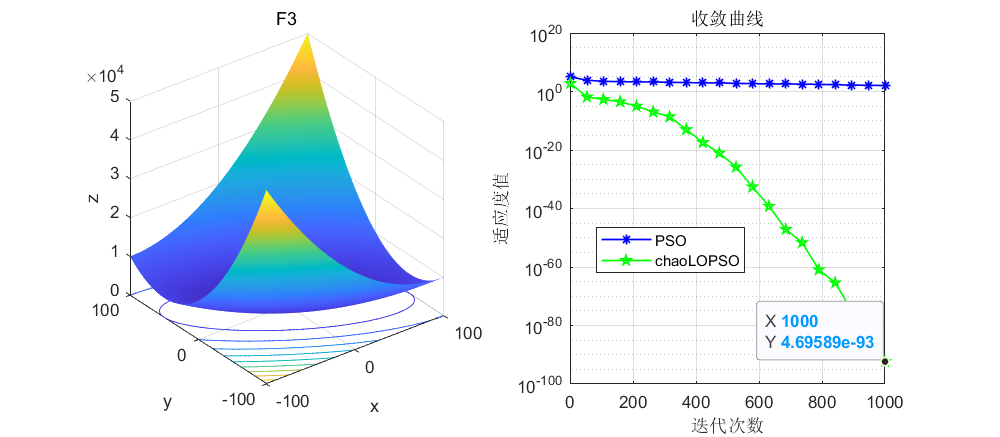
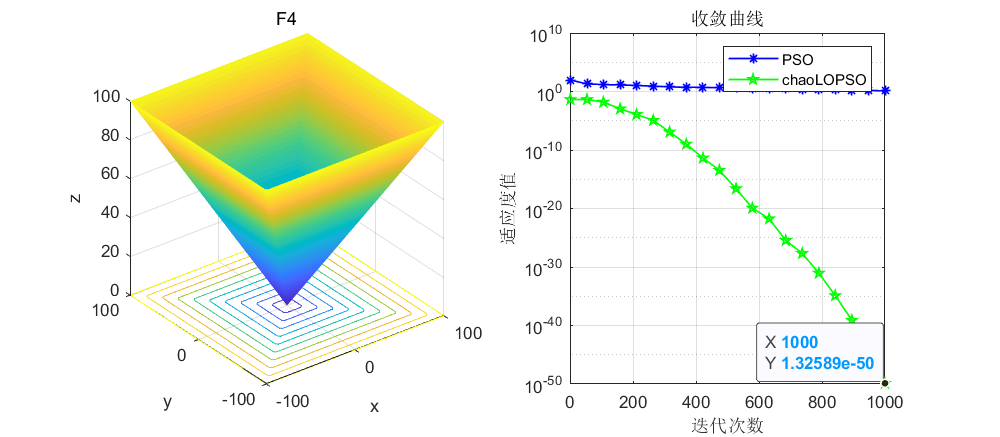

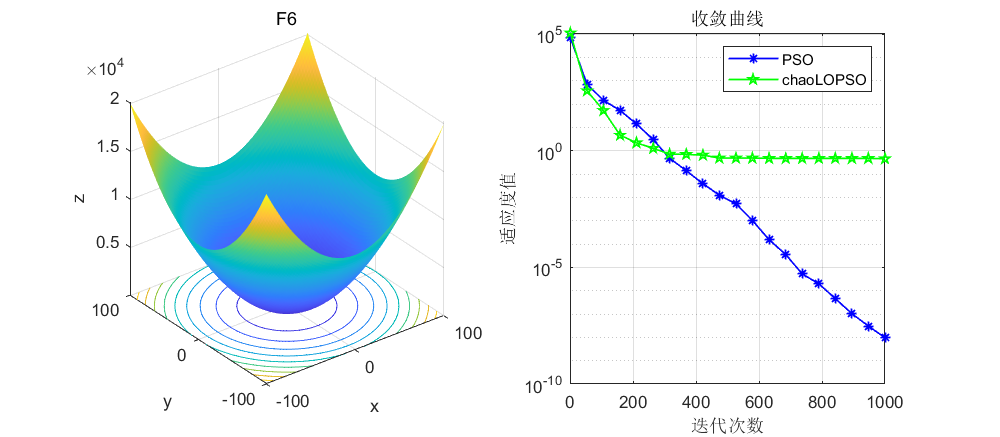
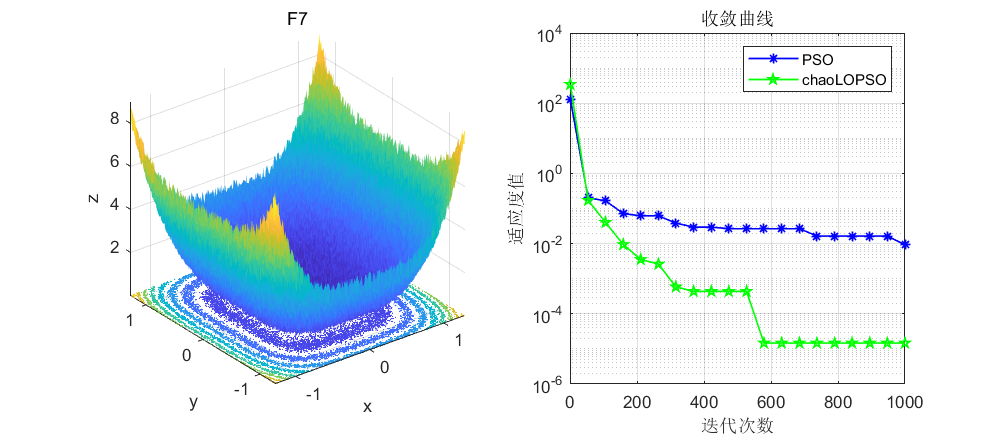
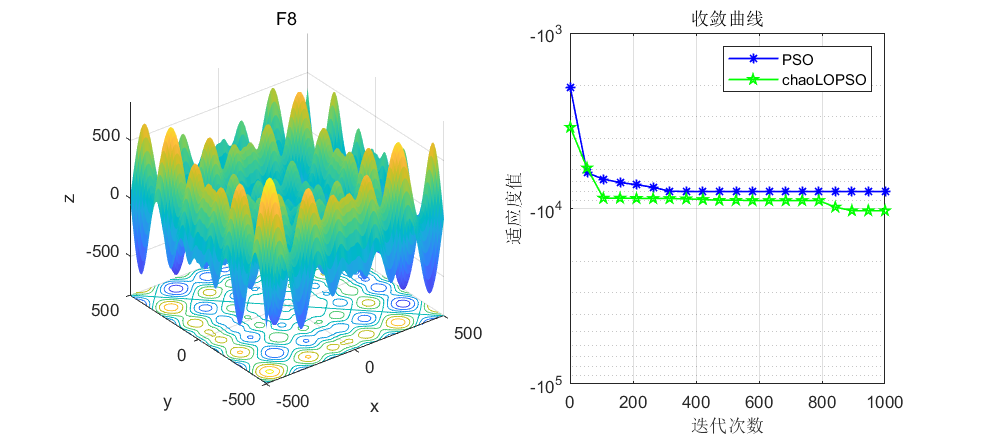
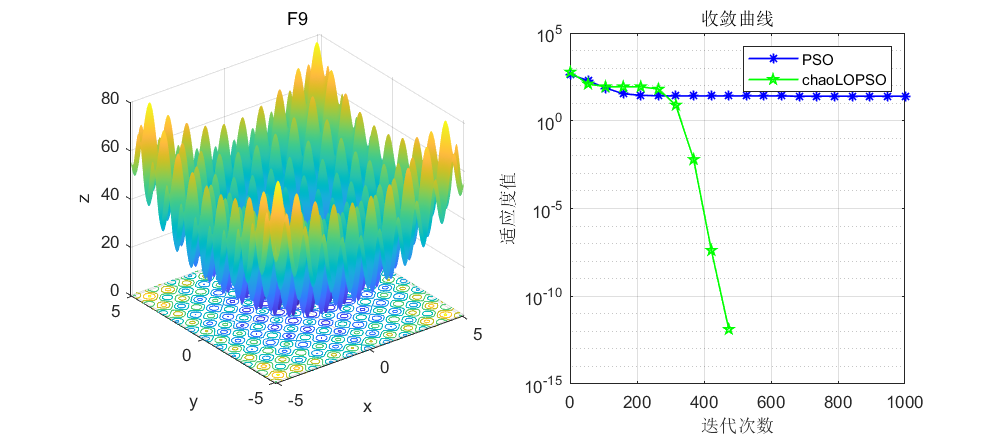

这里截选了前10个函数进行展示,可以看到改进前后在大部分函数在收敛速度和寻优精度上都有了很大的改进。
接下来讲一下改进的原理。
-
混沌映射
依旧是采用之前文章提到的10种混沌映射,可以自由切换映射方法,本文选取的映射方法是Logistic映射,大家也可以自行更改。没看过之前文章的小伙伴可以看一下。10种混沌映射优化灰狼算法,可一键切换,可用于优化所有群智能算法,以灰狼算法为例进行介绍
-
改进的莱维飞行机制
本文莱维飞行的添加并非如其他文章那样,直接在粒子更新的时候加上莱维系数,而是稍作改进,这样的效果也确实比直接加莱维系数要好。原理公式如下:

其中 , α是步长缩放因子,Levy(β)是萊维随机路径。

改进的原理如下:

其中α=0.01。
这么做的目的是将粒子群算法与莱维飞行进行优势互补,可以动态的调整每次寻优的比例系数。
代码如下:
clear
clc
close all
number='F10'; %选定优化函数,自行替换:F1~F23
% [lb,ub,D,y]:下界、上界、维度、目标函数表达式
[lb,ub,dim,fobj]=CEC2005(number);
N=50; %种群规模
T=1000; %最大迭代次数
%% 调用PSO算法
numm = 11;%% numm 混沌映射类型选择,1-10,tent、Logistic、Cubic、chebyshev、Piecewise、sinusoidal、Sine,ICMIC, Circle,Bernoulli,自由切换
%当numm等于11时,采用原始的随机数rand
% g 最佳位置
% gbest 最佳适应度值
% gb 收敛曲线
[g,gbest,gb]=PSO(numm,N,T,lb,ub,dim,fobj);
fprintf ('Best solution obtained by PSO: %s\n', num2str(g,'%e '));
fprintf ('Best objective function value obtained by PSO: %e \n', gbest);
%% 调用改进的PSO算法
numm = 1;%% numm 混沌映射类型选择,1-10,tent、Logistic、Cubic、chebyshev、Piecewise、sinusoidal、Sine,ICMIC, Circle,Bernoulli,自由切换
%当numm等于11时,采用原始的随机数rand
[chaosLPSOg,chaosLPSOgbest,chaosLPSOgb]=chaosLPSO(numm,N,T,lb,ub,dim,fobj);
fprintf ('Best solution obtained by chaosLPSO: %s\n', num2str(chaosLPSOg,'%e '));
fprintf ('Best objective function value obtained by chaosLPSO: %e \n', chaosLPSOgbest);
%% Figure
figure1 = figure('Color',[1 1 1]);
G1=subplot(1,2,1,'Parent',figure1);
func_plot(number)
title(number)
xlabel('x')
ylabel('y')
zlabel('z')
subplot(1,2,2)
G2=subplot(1,2,2,'Parent',figure1);
CNT=20;
k=round(linspace(1,T,CNT)); %随机选CNT个点
% 注意:如果收敛曲线画出来的点很少,随机点很稀疏,说明点取少了,这时应增加取点的数量,100、200、300等,逐渐增加
% 相反,如果收敛曲线上的随机点非常密集,说明点取多了,此时要减少取点数量
iter=1:1:T;
semilogy(iter(k),gb(k),'b-*','linewidth',1);
hold on
semilogy(iter(k),chaosLPSOgb(k),'g-p','linewidth',1);
grid on;
title('收敛曲线')
xlabel('迭代次数');
ylabel('适应度值');
box on
legend('PSO','chaoLOPSO')
set (gcf,'position', [300,300,800,350])注意看第11行变量numm,可以选择1-10不同的映射,1-10分别为,tent、Logistic、Cubic、chebyshev、Piecewise、sinusoidal、Sine,ICMIC, Circle,Bernoulli。选择不同的数字可以随意切换。
获取完整代码方法,下方卡片回复关键词:LPSO
















 473
473











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











