






 文章介绍了一种名为PSA的新型元启发式优化算法,它结合了PID控制的递归特性,用于广泛搜索空间的优化。通过与多种算法比较,PSA展示了强大的进化能力和快速搜索速度。算法通过迭代调整偏差,促使种群收敛至最优状态,并在计算机领域顶级期刊上有发表。
文章介绍了一种名为PSA的新型元启发式优化算法,它结合了PID控制的递归特性,用于广泛搜索空间的优化。通过与多种算法比较,PSA展示了强大的进化能力和快速搜索速度。算法通过迭代调整偏差,促使种群收敛至最优状态,并在计算机领域顶级期刊上有发表。
PID搜索算法(PID-based search algorithm, PSA)是一种全新的元启发式优化算法,增量式PID控制使当前时刻的控制量与前一刻的控制量之差,这个差就是新的控制量,这是一种递归算法。PSA是数学建模和实现,以实现在广泛的搜索空间的优化。通过与近年来提出的7种元启发式算法的比较,验证了该算法的优化性能,该算法具有进化能力强、搜索速度快、寻优能力强的特点。该成果于2024年发表在计算机领域一区期刊The Journal of Supercomputing上,在多类实际工程问题上也得到了很好的验证。
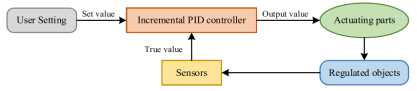
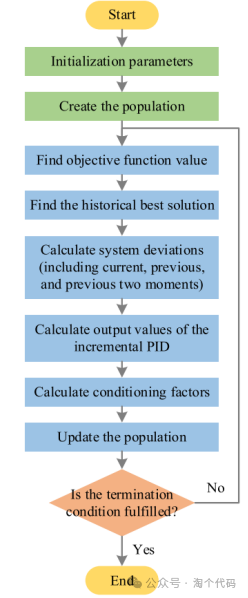
用户设定目标值后,增量式PID控制器给致动器输出值,致动器根据输出值对被控对象进行调节。被控对象调整后的真实值由传感器获取,并再次传递给增量PID控制器。该算法基于增量PID控制器,通过不断调整系统偏差,使整个种群收敛到最优状态。增量式PID控制是一种比例积分导数控制,其调节过程如下图所示。
1、算法原理
(1)种群初始化
优化问题由一组决策变量、约束和目标函数组成。可以假设该组决策变量的个数为d,变量的上界为u,下界为l。PSA的控制参数包括最大迭代次数T和种群大小n,则初始种群可表示为
式中xij表示第I个个体的第j维;Uj和lj分别是第j个变量(维)的上界和下界;R1是0到1之间的随机数。
假设目标函数为f,则第i个个体的目标函数值fi可由下式计算。
(2)增量PID计算系统偏差
对于最小化问题,迭代次数t处的最佳个体x*(t)是种群历史最小值所对应的个体。对于若干次迭代,总体的偏差周(t)为
为了便于计算和迭代更新,当迭代次数为t时,将前一次迭代的总体偏差分别表示为ek−1(t),将前两次迭代的总体偏差分别表示为ek−2(t)。那么当t = 1时,可以令ek−2(t) = ek−1(t) = ek(t)。当t > 1时,ek−2(t) = ek−1(t−1)。在PID算法中,当t > 1时,ek−1应等于前一刻系统中用户设置值与真实值的偏差。
在PSA中,用户集的值是最优值,但每次迭代后的最优值并不总是不变的;因此,在提出的PSA中,ek−1(t)不能简单地等于ek(t−1)。如下图所示,ek - 1(t)应该等于x*(t) - x(t - 1),但这也意味着要存储x(t - 1)。
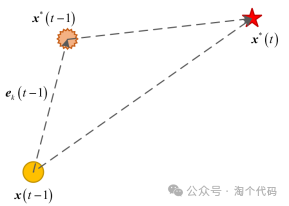
为了尽可能降低算法的空间复杂度,最好将最终的ek - 1(t)写成ek(t - 1)+x*(t) - x*(t - 1)而不是x*(t) - x(t - 1)。因此,ek−1(t)可以表示为
(3)PID调节作用
在现实问题中,比例、积分和微分因子会根据不同的情况和问题进行调整。则当迭代次数为t时,PID调节输出值Δu(t)为
式中r2、r3、r4为n行1列0 ~ 1的随机数向量;Kp、Ki、Kd分别为比例、积分、微分的调整系数,本文分别设为1、0.5、1.2。
在传统的PID算法中,输出调节值为0表示实值在某一点已经达到用户的设定值。然而,随着时间的增加,如果不调整被控对象,真实值将很快不等于设定值。因此,为了防止这种现象,通常在原来的调节值上增加一个常数。所有的解都非常接近最优解,特别是在早期迭代中,这对PSA来说是不利的,这种现象可能导致算法陷入局部最优。因此,在原来的Δu(t)上,本文还增加了一个称为零输出的条件因子,以防止算法陷入局部最优。零输出定义如下式所示:
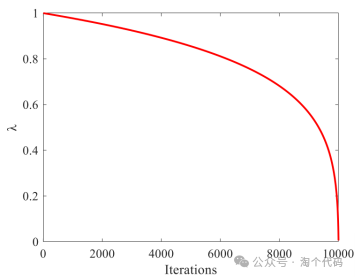
式中r5为n行d列0 ~ 1随机数的向量;λ为调节系数,由下式计算得到:
λ随t的变化如下图所示。可以看出,λ随着t的增加而缓慢减小,这有助于算法的充分探索。在后期,λ迅速减小,有助于算法从探索转向利用。
上式中的L是一个L´every飞行函数,定义如下式所示:
式中,u和v分别为符合标准正态分布的n行、d列随机数矩阵;β是一个设定为1.5的因子。
所有个体的更新都与Δu(t)和o(t)有关。人口更新公式定义为
式中η为n行1列矩阵,表示为η = r6cos(t/ t)
其中r6是由n行1列0到1个随机数组成的矩阵。PSA的流程图分别如下图所示。
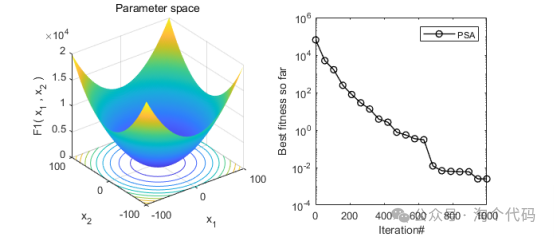
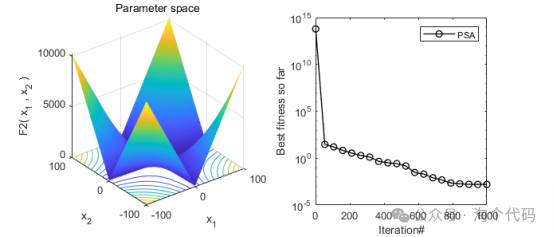
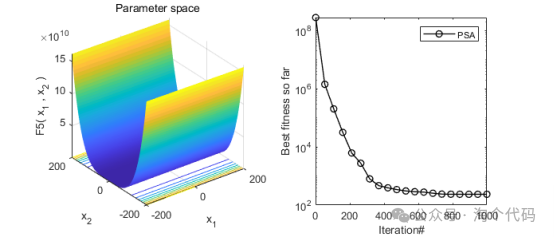
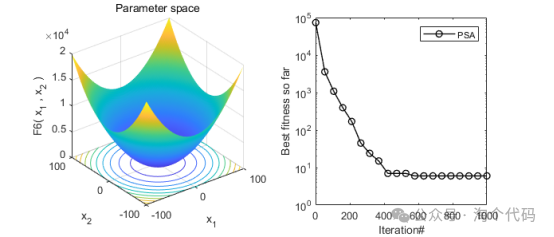
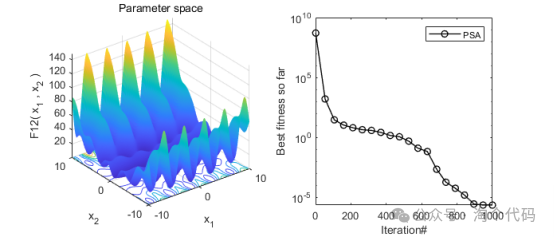
2、结果展示

3、MATLAB核心代码
function [TargetX,TargetF,ConvergenceCurve] = PSA (fun,nvars,lb,ub,N,T)
%% Initialization
ConvergenceCurve = zeros(1,T);
t = 1;
Kp = 1;
Ki = 0.5;
Kd = 1.2;
LogT = log(T);
% Create the population
[x, lb, ub]=Initialization(N,nvars,ub,lb);
lbExtended = repmat (lb,[N,1]);
ubExtended = repmat (ub,[N,1]);
% Create the fitness vector
f = zeros(N,1);
for i = 1:N
f(i,:) = fun (x(i,:));
end
%% main loop
while t<=T
% Step 1: Guide selection mechanism
if t == 1
[TargetF, index]=min(f);
TargetX = x(index,:);
newTargetX = TargetX;
newTargetF = TargetF;
else
for i = 1:N
f(i,:) = fun (x(i,:));
end
if min(f)<TargetF
[newTargetF, index]=min(f);
newTargetX = x(index,:);
end
end
ConvergenceCurve(t) = newTargetF;
% Step 2: Search operations
if t == 1
Ek = TargetX - x;
Ek_1 = Ek;
Ek_2 = Ek;
else
Ek_2 = Ek_1;
Ek_1 = Ek + newTargetX - TargetX;
Ek = newTargetX - x;
TargetX = newTargetX;
TargetF = newTargetF;
end
a = (log(T-t+2)/LogT)^2;
out0 = (cos(1-t/T) + a*rand(N,nvars).*PSA_levyFlight(N,nvars)).*Ek;
pid = rand(N,1)*Kp.*(Ek-Ek_1) + rand(N,1)*Ki.*Ek + rand(N,1)*Kd.*(Ek - 2*Ek_1 + Ek_2);
% Step 3: Update mechanism
r = rand(N,1)*cos(t/T);
x = x + r.*pid + (1-r).*out0;
lbViolated = x < lbExtended;
ubViolated = x > ubExtended;
x (lbViolated) = lbExtended (lbViolated);
x (ubViolated) = ubExtended (ubViolated);
% Next generation until termination criterion
t = t + 1;
end
end
function o=PSA_levyFlight(n,d)
beta=1.5;
sigma=(gamma(1+beta).*sin(pi*beta/2)./(gamma((1+beta)/2).*beta.*2.^((beta-1)/2))).^(1/beta);
u=randn(n,d)*sigma;
v=randn(n,d);
step=u./abs(v).^(1/beta);
o=step;
end参考文献
[1]Gao Y. PID-based search algorithm: A novel metaheuristic algorithm based on PID algorithm[J]. Expert Systems With Applications, 2023, 232: 120886.
完整代码获取方式:后台回复关键字:
TGDM877


















 1123
1123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











