1. MAVLink简介
MAVLink(Micro Air Vehicle Link,微型空中飞行器链路通讯协议)是无人飞行器与地面站(Ground Control Station ,GCS)之间通讯,以及无人飞行器之间通讯最常用的协议。它已经在PX4、APM、PIXHAWK和Parrot AR.Drone飞控平台上进行了大量测试。
2.发明者Lorenz Meier简介
MAVLink的最初开发于2009年,由Lorenz Meier完成。Lorenz Meier的LinkedIn主页是:https://www.linkedin.com/in/meierlorenz,个人主页是:https://www.inf.ethz.ch/personal/lomeier/。
根据官网和个人主页,Lorenz Meie的个人经历如下:
2004年~2008年在德国康斯坦茨大学(Universität Konstanz)就读信息工程专业;
2008 年~2011年在苏黎世联邦理工学院(德语:Eidgenössische Technische Hochschule Zürich,简称 ETH Zürich或ETHZ)就读视觉计算方向研究生;
2011~至今在ETHZ攻读博士后,研究方向是:Research on Drones and mobile phones focused on obstacle mapping, path planning and control.
2011年到现在,Lorenz Meier一直是开源无人机项目Autopilot的建立者和维护者。关于Autopilot,我会另辟章节介绍。
从介绍来看,Lorenz Meier的研究方向包括了无人机避障、基于智能手机或无人机的3D重建、无人机通讯协议等有趣又前言的内容。
这个页面是Lorenz Meier发表的几篇文章:https://www.researchgate.net/profile/Lorenz_Meier3
3. MAVLink相关资料
维基百科:https://en.wikipedia.org/wiki/MAVLink
MavLink官方网站:http://qgroundcontrol.org/mavlink/start
Python写的用于生成C、Java等语言的MavLink生成器软件:https://github.com/mavlink/mavlink
4.协议构成
下面内容引自官网。
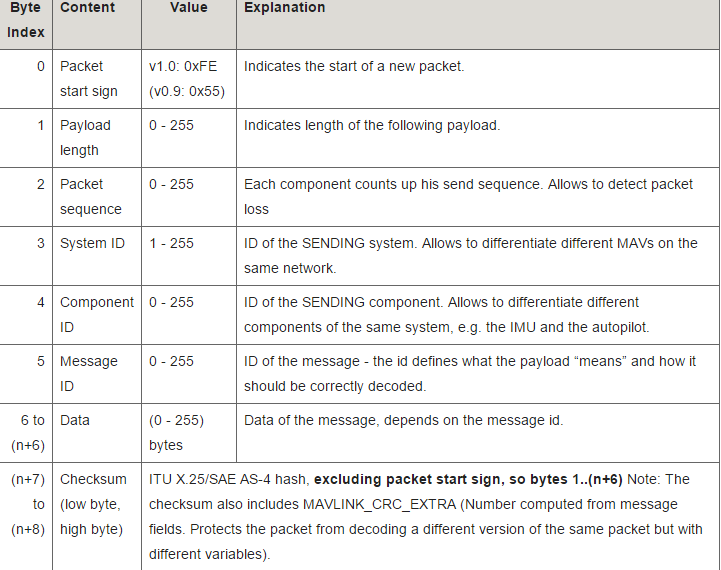
• The checksum is the same as used in ITU X.25 and SAE AS-4 standards (CRC-16-CCITT), documented in SAE AS5669A. Please see the MAVLink source code for a documented C-implementation of it. LINK TO CHECKSUM
• The minimum packet length is 8 bytes for acknowledgement packets without payload
• The maximum packet length is 263 bytes for full payload
MavLink的长度是固定的,即 17byte= 6 bytes header + 9 bytes payload + 2 bytes checksum。
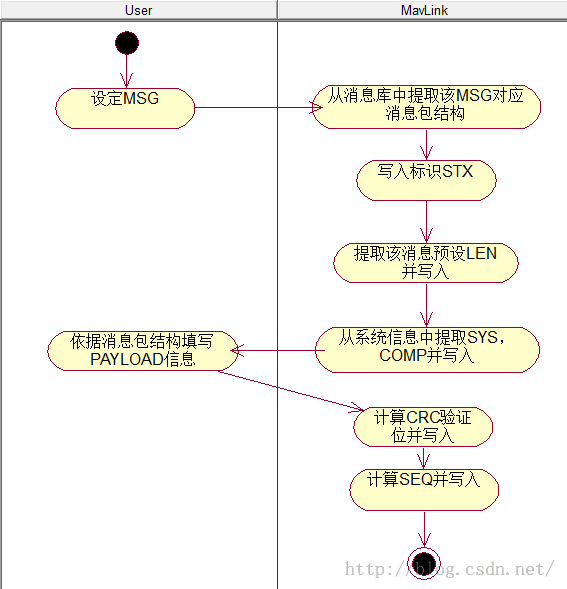
5.封包过程
由用户生成的部分包括PlayLoad本身、消息包的STX、COMP、MSG,其他部分自动生成。下图来自于博客http://blog.csdn.net/u013983741/article/details/48053235,侵删。
6.3DR Service实现MavLink协议
3DR Service是Autopilot提供的Android端的app服务,用于做SDK,提供与无人机通讯,以AIDL的方式为上层的App提供服务。基于3DRService,开发者可以不用处理复杂的MavLink通讯,只根据AIDL接口调用服务即可。
这里下载了3DRService用于分析,地址为:https://github.com/ne0fhyk/3DRServices。3DRService将MavLink的协议部分作为单独的包,即项目中的dependencyLibs文件夹。
6.1. UML图
绘制dependencyLibs的UML图。该包主要提供了MavLink的所有类型的封包类和解析类。
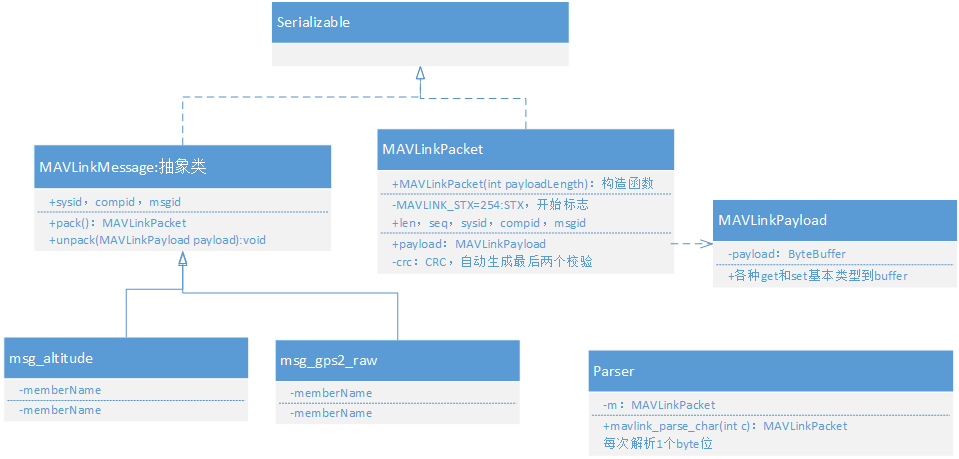
例如,对于MAVLinkPacket类,其核心部分为封包过程。
/**
* Encode this packet for transmission.
*
* @return Array with bytes to be transmitted
*/
public byte[] encodePacket() {
byte[] buffer = new byte[6 + len + 2];
int i = 0;
buffer[i++] = (byte) MAVLINK_STX;
buffer[i++] = (byte) len;
buffer[i++] = (byte) seq;
buffer[i++] = (byte) sysid;
buffer[i++] = (byte) compid;
buffer[i++] = (byte) msgid;
final int payloadSize = payload.size();
for (int j = 0; j < payloadSize; j++) {
buffer[i++] = payload.payload.get(j);
}
generateCRC();
buffer[i++] = (byte) (crc.getLSB());
buffer[i++] = (byte) (crc.getMSB());
return buffer;
}
解包的核心部分在Parser类中:
/**
* This is a convenience function which handles the complete MAVLink
* parsing. the function will parse one byte at a time and return the
* complete packet once it could be successfully decoded. Checksum and other
* failures will be silently ignored.
*
* @param c
* The char to parse
*/
public MAVLinkPacket mavlink_parse_char(int c) {
msg_received = false;
switch (state) {
case MAVLINK_PARSE_STATE_UNINIT:
case MAVLINK_PARSE_STATE_IDLE:
if (c == MAVLinkPacket.MAVLINK_STX) {
state = MAV_states.MAVLINK_PARSE_STATE_GOT_STX;
}
break;
case MAVLINK_PARSE_STATE_GOT_STX:
if (msg_received) {
msg_received = false;
state = MAV_states.MAVLINK_PARSE_STATE_IDLE;
} else {
m = new MAVLinkPacket(c);
state = MAV_states.MAVLINK_PARSE_STATE_GOT_LENGTH;
}
break;
case MAVLINK_PARSE_STATE_GOT_LENGTH:
m.seq = c;
state = MAV_states.MAVLINK_PARSE_STATE_GOT_SEQ;
break;
case MAVLINK_PARSE_STATE_GOT_SEQ:
m.sysid = c;
state = MAV_states.MAVLINK_PARSE_STATE_GOT_SYSID;
break;
case MAVLINK_PARSE_STATE_GOT_SYSID:
m.compid = c;
state = MAV_states.MAVLINK_PARSE_STATE_GOT_COMPID;
break;
case MAVLINK_PARSE_STATE_GOT_COMPID:
m.msgid = c;
if (m.len == 0) {
state = MAV_states.MAVLINK_PARSE_STATE_GOT_PAYLOAD;
} else {
state = MAV_states.MAVLINK_PARSE_STATE_GOT_MSGID;
}
break;
case MAVLINK_PARSE_STATE_GOT_MSGID:
m.payload.add((byte) c);
if (m.payloadIsFilled()) {
state = MAV_states.MAVLINK_PARSE_STATE_GOT_PAYLOAD;
}
break;
case MAVLINK_PARSE_STATE_GOT_PAYLOAD:
m.generateCRC();
if (c != m.crc.getLSB()) {
msg_received = false;
state = MAV_states.MAVLINK_PARSE_STATE_IDLE;
if (c == MAVLinkPacket.MAVLINK_STX) {
state = MAV_states.MAVLINK_PARSE_STATE_GOT_STX;
m.crc.start_checksum();
}
stats.crcError();
} else {
state = MAV_states.MAVLINK_PARSE_STATE_GOT_CRC1;
}
break;
case MAVLINK_PARSE_STATE_GOT_CRC1:
if (c != m.crc.getMSB()) {
msg_received = false;
state = MAV_states.MAVLINK_PARSE_STATE_IDLE;
if (c == MAVLinkPacket.MAVLINK_STX) {
state = MAV_states.MAVLINK_PARSE_STATE_GOT_STX;
m.crc.start_checksum();
}
stats.crcError();
} else {
stats.newPacket(m);
msg_received = true;
state = MAV_states.MAVLINK_PARSE_STATE_IDLE;
}
break;
}
if (msg_received) {
return m;
} else {
return null;
}
}
`
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
这个类的使用是逐个直接解析,解析完毕后返回完整的包,例如,对字节数组packet,解析过程如下:
for(int i = 0; i < packet.length - 1; i++){
parser.mavlink_parse_char(packet[i] & 0xFF);//每次解析1位
}
MAVLinkPacket m = parser.mavlink_parse_char(packet[packet.length - 1] & 0xFF);//最后1位即可返回
6.2 MavLink包测试
dependencyLibs提供了测试实例。以msg_altitude为例,判断生成的包和解析的包是否相同,即可判断该类是否正确。
/**
* The current system altitude.
*/
public class msg_altitude_test{
public static final int MAVLINK_MSG_ID_ALTITUDE = 141;
public static final int MAVLINK_MSG_LENGTH = 24;
private static final long serialVersionUID = MAVLINK_MSG_ID_ALTITUDE;
private Parser parser = new Parser();
public CRC generateCRC(byte[] packet){
CRC crc = new CRC();
for (int i = 1; i < packet.length - 2; i++) {
crc.update_checksum(packet[i] & 0xFF);
}
crc.finish_checksum(MAVLINK_MSG_ID_ALTITUDE);
return crc;
}
public byte[] generateTestPacket(){
ByteBuffer payload = ByteBuffer.allocate(6 + MAVLINK_MSG_LENGTH + 2);
payload.put((byte)MAVLinkPacket.MAVLINK_STX);
payload.put((byte)MAVLINK_MSG_LENGTH);
payload.put((byte)0);
payload.put((byte)255);
payload.put((byte)190);
payload.put((byte)MAVLINK_MSG_ID_ALTITUDE);
payload.putFloat((float)17.0);
payload.putFloat((float)45.0);
payload.putFloat((float)73.0);
payload.putFloat((float)101.0);
payload.putFloat((float)129.0);
payload.putFloat((float)157.0);
CRC crc = generateCRC(payload.array());
payload.put((byte)crc.getLSB());
payload.put((byte)crc.getMSB());
return payload.array();
}
@Test
public void test(){
byte[] packet = generateTestPacket();
for(int i = 0; i < packet.length - 1; i++){
parser.mavlink_parse_char(packet[i] & 0xFF);
}
MAVLinkPacket m = parser.mavlink_parse_char(packet[packet.length - 1] & 0xFF);
byte[] processedPacket = m.encodePacket();
assertArrayEquals("msg_altitude", processedPacket, packet);
}
}
参考
[1]http://mrsxm.mfzgi5lqnfwg65bomnxw2.erenta.ru/wp-content/uploads/sites/6/2015/05/MAVLINK_FOR_DUMMIESPart1_v.1.1.pdf
[2]http://blog.csdn.net/u013983741/article/details/48053235























 1013
1013

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









