









前言
曲面重建可以用于逆向工程、数据可视化、自动化建模等领域。本文希望能够将曲面重建运用在点云分割后的显示上,以增强点云分割后的可视化效果。
PCL中目前实现了多种基于点云的曲面重建算法,如:泊松曲面重建、贪婪投影三角化、移动立方体、EarClipping等算法。下面我将对泊松曲面重建算法和贪婪投影三角化算法进行介绍,具体算法的原理这里就不过多介绍了,只将代码和实验效果贴出共大家交流学习。
代码来源:这里写链接内容
http://pointclouds.org/documentation/tutorials/greedy_projection.php#greedy-triangulation
贪婪投影三角化算法
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/kdtree/kdtree_flann.h>
#include <pcl/features/normal_3d.h>
#include <pcl/surface/gp3.h>
#include <pcl/visualization/pcl_visualizer.h>
int
main(/*int argc, char** argv*/)
{
// Load input file into a PointCloud<T> with an appropriate type
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PCLPointCloud2 cloud_blob;
pcl::io::loadPCDFile("bun0.pcd", cloud_blob);
pcl::fromPCLPointCloud2(cloud_blob, *cloud);
//* the data should be available in cloud
// Normal estimation*
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> n;
pcl::PointCloud<pcl::Normal>::Ptr normals(new pcl::PointCloud<pcl::Normal>);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud(cloud);
n.setInputCloud(cloud);
n.setSearchMethod(tree);
n.setKSearch(20);
n.compute(*normals);
//* normals should not contain the point normals + surface curvatures
// Concatenate the XYZ and normal fields*
pcl::PointCloud<pcl::PointNormal>::Ptr cloud_with_normals(new pcl::PointCloud<pcl::PointNormal>);
pcl::concatenateFields(*cloud, *normals, *cloud_with_normals);
//* cloud_with_normals = cloud + normals
// Create search tree*
pcl::search::KdTree<pcl::PointNormal>::Ptr tree2(new pcl::search::KdTree<pcl::PointNormal>);
tree2->setInputCloud(cloud_with_normals);
// Initialize objects
pcl::GreedyProjectionTriangulation<pcl::PointNormal> gp3;
pcl::PolygonMesh triangles;
// Set the maximum distance between connected points (maximum edge length)
gp3.setSearchRadius(0.025);
// Set typical values for the parameters
gp3.setMu(2.5);
gp3.setMaximumNearestNeighbors(100);
gp3.setMaximumSurfaceAngle(M_PI / 4); // 45 degrees
gp3.setMinimumAngle(M_PI / 18); // 10 degrees
gp3.setMaximumAngle(2 * M_PI / 3); // 120 degrees
gp3.setNormalConsistency(false);
// Get result
gp3.setInputCloud(cloud_with_normals);
gp3.setSearchMethod(tree2);
gp3.reconstruct(triangles);
// Additional vertex information
std::vector<int> parts = gp3.getPartIDs();
std::vector<int> states = gp3.getPointStates();
boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPolygonMesh(triangles, "triangles");
viewer->addCoordinateSystem(1.0);
viewer->initCameraParameters();
while (!viewer->wasStopped()){
viewer->spinOnce(100);
boost::this_thread::sleep(boost::posix_time::microseconds(100000));
}
// Finish
return (0);
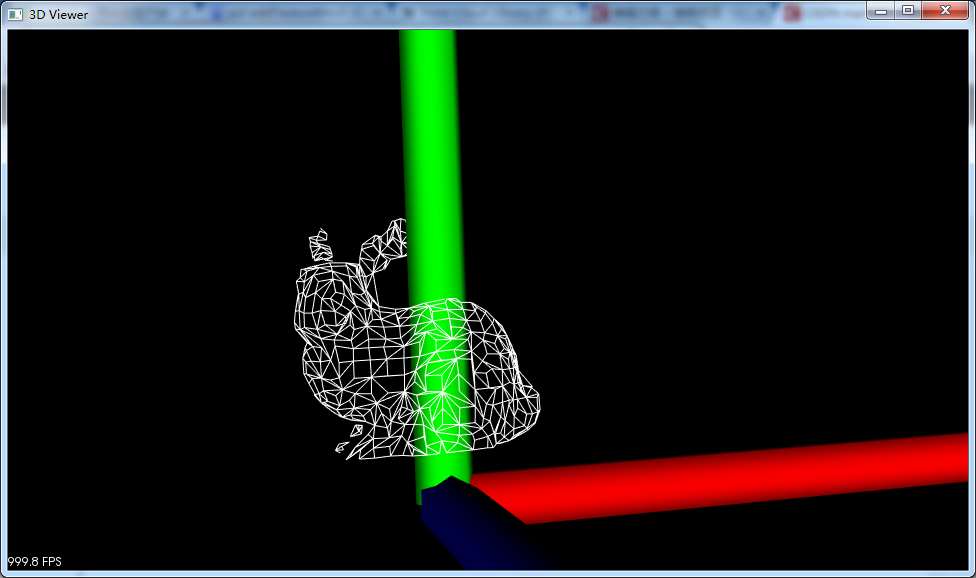
}如果想要只显示三角化后的网格,添加下面代码:
viewer->addPolylineFromPolygonMesh(triangles);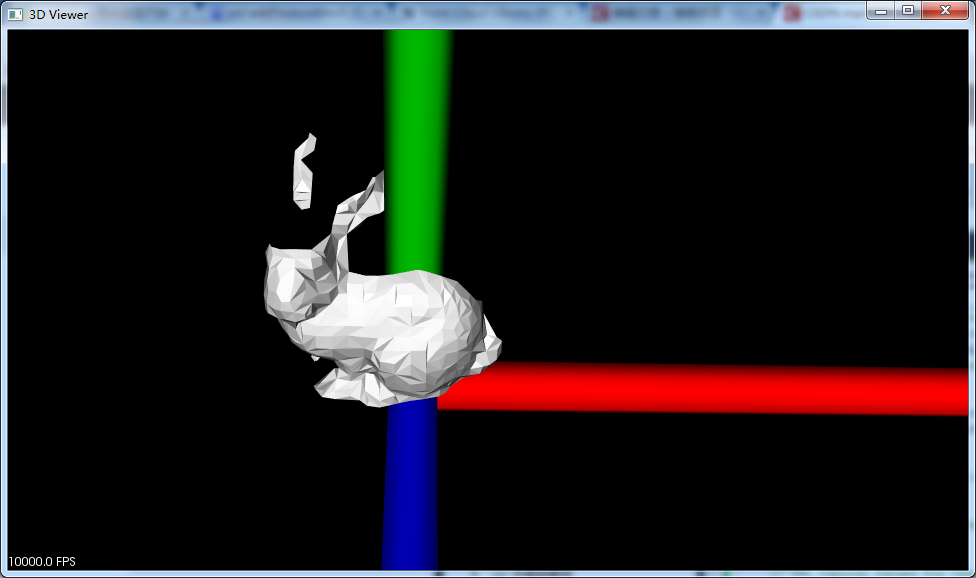
只显示三角网:
泊松曲面重建算法
pcl::Poisson<pcl::PointNormal> pn;
pn.setConfidence(false);
pn.setDegree(2);
pn.setDepth(8);
pn.setIsoDivide(8);
pn.setManifold(false);
pn.setOutputPolygons(false);
pn.setSamplesPerNode(3.0);
pn.setScale(1.25);
pn.setSolverDivide(8);
pn.setSearchMethod(tree2);
pn.setInputCloud(cloud_with_normals);
pcl::PolygonMesh mesh;
pn.performReconstruction(mesh);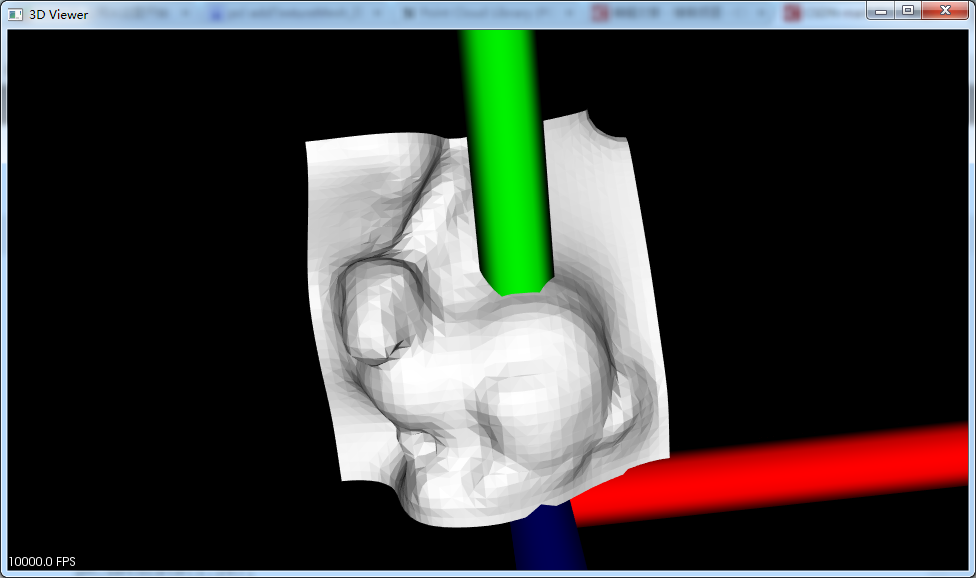
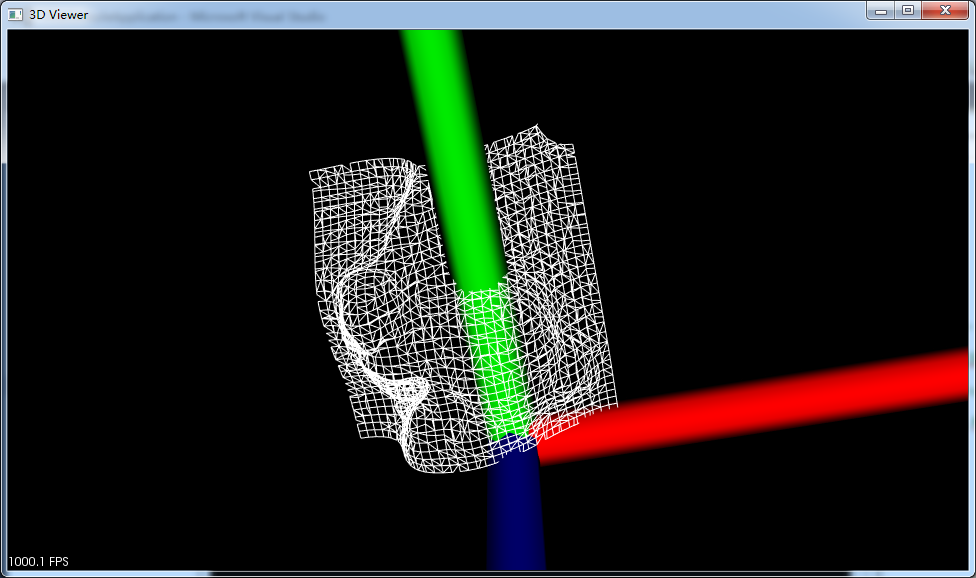
只显示三角网:















 1156
1156

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









